You might also like
- MilSpec 1797Document849 pagesMilSpec 1797Javier CisnerosNo ratings yet
- Instrumentation For Flight TestingDocument17 pagesInstrumentation For Flight TestingNambi RajanNo ratings yet
- Airworthiness StandardsDocument15 pagesAirworthiness StandardsJason RossNo ratings yet
- NR - Numerical Model of Single Main Rotor Helicopter DynamicsDocument10 pagesNR - Numerical Model of Single Main Rotor Helicopter DynamicsHossam T BadranNo ratings yet
- Z5311577 - Aero3660 - Bankstown Flight Excercise - Aaron HoytashDocument17 pagesZ5311577 - Aero3660 - Bankstown Flight Excercise - Aaron HoytashAaron HoytashNo ratings yet
- Neral Capítulo.1 PDFDocument8 pagesNeral Capítulo.1 PDFemhidalgoNo ratings yet
- A Review On Bird Strike Capability On Service-Age Aircraft CanopyDocument14 pagesA Review On Bird Strike Capability On Service-Age Aircraft Canopytomzee1No ratings yet
- Afwal TR 81 3109 Guide For Mil F 8785cDocument255 pagesAfwal TR 81 3109 Guide For Mil F 8785cminyshow23No ratings yet
- Integrated Landing Gear System PDFDocument14 pagesIntegrated Landing Gear System PDFMario Di PisaNo ratings yet
- Schrenk Dan Gaya DalamDocument7 pagesSchrenk Dan Gaya DalamandriaerospaceNo ratings yet
- Constraint DiagramsDocument18 pagesConstraint Diagramsomga747No ratings yet
- Aerodynamic stability derivatives for aircraft roll and yawDocument3 pagesAerodynamic stability derivatives for aircraft roll and yawGurunath AeroNo ratings yet
- Multhopp Method NASADocument81 pagesMulthopp Method NASAGabriel PiresNo ratings yet
- AIRPLANE PERFORMANCE AT ACCELERATED FLIGHTDocument64 pagesAIRPLANE PERFORMANCE AT ACCELERATED FLIGHTJose A Rosado LopezNo ratings yet
- Mettler Bernard 2000 1Document25 pagesMettler Bernard 2000 1sanjesh100% (1)
- Astro320 Problem Set3 SolutionsDocument5 pagesAstro320 Problem Set3 SolutionsMike Rowen BanaresNo ratings yet
- Chapter 6 PerformanceDocument111 pagesChapter 6 PerformanceLenh Nguyen0% (1)
- Calculating Time, Speed and Distance in NavigationDocument2 pagesCalculating Time, Speed and Distance in NavigationUma Maheswararao100% (1)
- Design ND Optimization Using CFDDocument29 pagesDesign ND Optimization Using CFDKrishna TejaNo ratings yet
- Aircraft Design Project 2Document120 pagesAircraft Design Project 2Sandeep NrynNo ratings yet
- Mil A 8870CDocument52 pagesMil A 8870CVesa RäisänenNo ratings yet
- AIAA 59830 918 AMOSmith High Lift AerodynamicsDocument30 pagesAIAA 59830 918 AMOSmith High Lift Aerodynamicsteflon_mac100% (1)
- Flutter TestDocument26 pagesFlutter TestYvessNo ratings yet
- CS-27 Amdt 6 PDFDocument168 pagesCS-27 Amdt 6 PDFstaedtlerpNo ratings yet
- CH 2 Problems SheetDocument3 pagesCH 2 Problems SheetqzakryaNo ratings yet
- Comp AeroelasticityDocument28 pagesComp Aeroelasticityபிரபாகரன் ஆறுமுகம்No ratings yet
- Airborne Doppler Radar Navigation of Jet Transport Aircraft-EftDocument10 pagesAirborne Doppler Radar Navigation of Jet Transport Aircraft-Eftjulio perezNo ratings yet
- Technical Standard Orders (TSO)Document23 pagesTechnical Standard Orders (TSO)Mak Or0% (1)
- Electe: S. Schallhorn, K. Daill, W.B. CushmanDocument20 pagesElecte: S. Schallhorn, K. Daill, W.B. CushmanORLANDO CASTILLONo ratings yet
- Lateral and Longitudinal Stability Analysis of UAV Using Xflr5-1163 PDFDocument5 pagesLateral and Longitudinal Stability Analysis of UAV Using Xflr5-1163 PDFAlexandraAndreeaNo ratings yet
- Analjgue Signal Conditioning For Flight Test InstrumentationDocument181 pagesAnaljgue Signal Conditioning For Flight Test InstrumentationAndrew AngNo ratings yet
- AE4011 Final Report (LHT-4)Document127 pagesAE4011 Final Report (LHT-4)Tan ZhenyangNo ratings yet
- SpaceWorks VTVL Study - ReleaseDocument13 pagesSpaceWorks VTVL Study - ReleasecrocomodxNo ratings yet
- AC-23-8 ENSAIO EM VÔO Final-Part1Document174 pagesAC-23-8 ENSAIO EM VÔO Final-Part1Marcus DragoNo ratings yet
- Energy-Maneuverability MethodsDocument5 pagesEnergy-Maneuverability Methodsaleemsalman55No ratings yet
- Supercritical AerofoilsDocument76 pagesSupercritical AerofoilsSuhas PrabhakarNo ratings yet
- Aerodynamic Optimization of WingsDocument21 pagesAerodynamic Optimization of WingsMarcos SoarNo ratings yet
- E8 CeDocument10 pagesE8 CeAlex SantosNo ratings yet
- Performance Optimization of A Modified Let L-410 Turbolet UVP-E20Document14 pagesPerformance Optimization of A Modified Let L-410 Turbolet UVP-E20Dominic ChettiarNo ratings yet
- Duracell Ultra SLA General Purpose Product Sheet ID3713Document2 pagesDuracell Ultra SLA General Purpose Product Sheet ID3713Caja FuegoNo ratings yet
- CFD A A D T TU-154M P: Ssessment of Erodynamic Egradation of HE LaneDocument8 pagesCFD A A D T TU-154M P: Ssessment of Erodynamic Egradation of HE LaneAlexander NenovNo ratings yet
- Flutter ExcitationDocument25 pagesFlutter ExcitationLeonardo ContrerasNo ratings yet
- CalSpan Upset Recovery TrainingDocument2 pagesCalSpan Upset Recovery TrainingHighspeed FlyboyNo ratings yet
- Indraero Siren 120 140 00Document28 pagesIndraero Siren 120 140 00bobbyflorezNo ratings yet
- IC TITLEDocument22 pagesIC TITLEmaya singhNo ratings yet
- P-403 Advanced Helicopter Th-57cDocument268 pagesP-403 Advanced Helicopter Th-57cakuankka1234No ratings yet
- Nasa TM 104316Document23 pagesNasa TM 104316friday24No ratings yet
- Joined-Wing Aircraft Design and OptimizationDocument11 pagesJoined-Wing Aircraft Design and OptimizationAli YıldırımNo ratings yet
- Helicopter Data PDFDocument20 pagesHelicopter Data PDFPalaniammal.RNo ratings yet
- Aerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsFrom EverandAerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsNo ratings yet
- Stabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesFrom EverandStabilization and Dynamic of Premixed Swirling Flames: Prevaporized, Stratified, Partially, and Fully Premixed RegimesNo ratings yet
- Methods of Radar Cross-section AnalysisFrom EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinNo ratings yet
- The Grid 2: Blueprint for a New Computing InfrastructureFrom EverandThe Grid 2: Blueprint for a New Computing InfrastructureNo ratings yet
- MATLAB Vortex Lattice Code for Aerodynamic Wing AnalysisDocument46 pagesMATLAB Vortex Lattice Code for Aerodynamic Wing AnalysisAlvin AnthonyNo ratings yet
- Flight Performance of Fixed and Rotary Wing AircraDocument8 pagesFlight Performance of Fixed and Rotary Wing AircraAlvin AnthonyNo ratings yet
- Aerospace: Hybrid Electric Aircraft Propulsion Case Study For Skydiving MissionDocument22 pagesAerospace: Hybrid Electric Aircraft Propulsion Case Study For Skydiving MissionAlvin AnthonyNo ratings yet
- CIVIL AVIATION CERTIFICATION REQUIREMENTS FOR AIRCRAFTDocument419 pagesCIVIL AVIATION CERTIFICATION REQUIREMENTS FOR AIRCRAFTsureshrnalNo ratings yet
- Nozzles PDFDocument18 pagesNozzles PDFalimNo ratings yet
- Lynxmotion Simonk Esc GuideDocument5 pagesLynxmotion Simonk Esc GuideAlvin AnthonyNo ratings yet
- Andrew Hendricks Avl Aero CoefficientsDocument8 pagesAndrew Hendricks Avl Aero CoefficientsAlvin AnthonyNo ratings yet
- Qprop Theory PDFDocument14 pagesQprop Theory PDFAlvin AnthonyNo ratings yet
- AVL ReportDocument17 pagesAVL ReportAlvin AnthonyNo ratings yet
- JBLADE v17Document14 pagesJBLADE v17Alvin AnthonyNo ratings yet
- Design Criteria For NozzleDocument11 pagesDesign Criteria For NozzleP KNo ratings yet
- Qip JP 06 Diffusers & NozzlesDocument36 pagesQip JP 06 Diffusers & NozzlesAlvin AnthonyNo ratings yet
- UAV AutoPilotDocument6 pagesUAV AutoPilotAlvin Anthony100% (1)
- Viscous Versus Structural Damping in Modal AnalysisDocument7 pagesViscous Versus Structural Damping in Modal AnalysistylerdurdaneNo ratings yet
- Wear 2Document2 pagesWear 2Alvin AnthonyNo ratings yet
- UntitledDocument1 pageUntitledAlvin AnthonyNo ratings yet
- Scilab For Real DummiesDocument504 pagesScilab For Real DummiesAcha Muhammad MundipNo ratings yet
- Son Dip On ThesisDocument228 pagesSon Dip On ThesisFatoom HashimNo ratings yet
- Ansys TutoDocument32 pagesAnsys Tutoசெல்வ குமார்100% (2)
- Lead Analyst with 7+ Years Experience in Aerospace and Automotive FEA SimulationDocument2 pagesLead Analyst with 7+ Years Experience in Aerospace and Automotive FEA SimulationAlvin AnthonyNo ratings yet
- Michigan ZESTT Structural Report 21 Jun 10Document51 pagesMichigan ZESTT Structural Report 21 Jun 10Alvin AnthonyNo ratings yet
- Chpt5ModalFrequencyResponse PDFDocument12 pagesChpt5ModalFrequencyResponse PDFAlvin AnthonyNo ratings yet
- Huntsman LY5052Document0 pagesHuntsman LY5052Alvin AnthonyNo ratings yet
- FEA Interview Questions Module 1Document3 pagesFEA Interview Questions Module 1sandeshlikes50% (2)
- Saturday, 23 February 2013 4:22 PM: Subject: Your Timtara Order Confirmation From: To: DateDocument1 pageSaturday, 23 February 2013 4:22 PM: Subject: Your Timtara Order Confirmation From: To: DateAlvin AnthonyNo ratings yet
- Longitudinal Static StabilityDocument6 pagesLongitudinal Static StabilitySerdar BilgeNo ratings yet
- MECH Single SystemDocument14 pagesMECH Single Systemstallone21No ratings yet
- Longitudinal Static StabilityDocument6 pagesLongitudinal Static StabilitySerdar BilgeNo ratings yet
- Sizing of Wing Flaps and Control Surfaces Sept 2010 ReleasedDocument11 pagesSizing of Wing Flaps and Control Surfaces Sept 2010 ReleasedAlvin AnthonyNo ratings yet
- Acceleration and velocity word problemsDocument4 pagesAcceleration and velocity word problemsArga Agung NugrohoNo ratings yet
- AIM-120 Advanced Medium Range Air To Air Missile AMRAAM, United States of AmericaDocument3 pagesAIM-120 Advanced Medium Range Air To Air Missile AMRAAM, United States of AmericaManuel Solis100% (1)
- Warbird Notes #1 Hydraulic Lock On Round EnginesDocument4 pagesWarbird Notes #1 Hydraulic Lock On Round EnginesRaphael Francisco PuttiniNo ratings yet
- Company ProfileDocument3 pagesCompany ProfileKoventhan RaviNo ratings yet
- Learjet 85 FactsheetDocument2 pagesLearjet 85 FactsheetJuan Carlos AbeledoNo ratings yet
- Flight Dynamics - UnitTest-01 - 2010 - JD (5B & 5D)Document3 pagesFlight Dynamics - UnitTest-01 - 2010 - JD (5B & 5D)ae00505No ratings yet
- Ways To Narrow Down A Topic - Free Online Course Materials - USU OpenCourseWareDocument2 pagesWays To Narrow Down A Topic - Free Online Course Materials - USU OpenCourseWareZepzep SarıaslanNo ratings yet
- Vintage Airplane - May 1984Document24 pagesVintage Airplane - May 1984Aviation/Space History LibraryNo ratings yet
- Ice & Rain ProtectionDocument6 pagesIce & Rain ProtectionAziz AimadNo ratings yet
- Thesis On Turbo PumpDocument5 pagesThesis On Turbo Pumppak0t0dynyj3100% (2)
- Pilatus Aircraft LTD - PC-21 Model Plan PDFDocument4 pagesPilatus Aircraft LTD - PC-21 Model Plan PDFMuchammad Ulil AidiNo ratings yet
- Grand Caravan EX ProductCard PDFDocument2 pagesGrand Caravan EX ProductCard PDFBayu Panji BaskoroNo ratings yet
- Rocket Propulsion-2 ct-2 qp-2016Document5 pagesRocket Propulsion-2 ct-2 qp-2016api-271354682No ratings yet
- 8th Grade Rockets and SatelitesDocument5 pages8th Grade Rockets and Satelitesapi-308631905No ratings yet
- Delta wing experiments in wind tunnelDocument34 pagesDelta wing experiments in wind tunnelBibhash Chandra MItraNo ratings yet
- Air Borne Wind TurbineDocument9 pagesAir Borne Wind TurbineADAM ISMAILNo ratings yet
- Practice Test, Nhaf 1Document3 pagesPractice Test, Nhaf 1Viet Hoa NguyenNo ratings yet
- Sa-3 GoaDocument5 pagesSa-3 GoaNick Numlk100% (1)
- 3.launch and Launch VehiclesDocument34 pages3.launch and Launch Vehiclesrama krishnaNo ratings yet
- Orbital Mechanics Cheat SheetDocument3 pagesOrbital Mechanics Cheat SheetRodolfo SotoNo ratings yet
- Tailwind OperationsDocument3 pagesTailwind Operationsiceman737No ratings yet
- PARACORNER Parachute Making CompetitionDocument7 pagesPARACORNER Parachute Making CompetitionAnimesh SharmaNo ratings yet
- JetPack Aviation Flying Motorcycle "SPEEDER" Set To FlyDocument3 pagesJetPack Aviation Flying Motorcycle "SPEEDER" Set To FlyPR.comNo ratings yet
- GKM College AE6413 CAD and Aircraft Component Drawing ManualDocument41 pagesGKM College AE6413 CAD and Aircraft Component Drawing ManualShanmuganathan100% (1)
- Messerschmitt Me 262 SchwalbeDocument39 pagesMesserschmitt Me 262 SchwalbeIgnacio Moratinos Castañeda100% (4)
- 6 - Licensing of Air ServicesintroductionDocument5 pages6 - Licensing of Air ServicesintroductionEllisa Jolly ValentineNo ratings yet
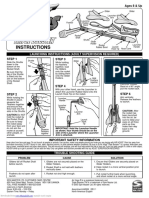
- Air Hogs Triple Booster InstructionsDocument1 pageAir Hogs Triple Booster InstructionsZeljko LekovicNo ratings yet
- ME-321 Aerospace Propulsion Problems Turboprop Engine CalculationsDocument1 pageME-321 Aerospace Propulsion Problems Turboprop Engine CalculationsMuhammad JamilNo ratings yet
- GulfstreamDocument12 pagesGulfstreamKrishna VamsiNo ratings yet
- Kalpana Chawla BiographyDocument10 pagesKalpana Chawla BiographyParmanand Mayank Ojha100% (1)