You might also like
- Group Leader and Schedule (Trimester 2 - 2016-2017)Document5 pagesGroup Leader and Schedule (Trimester 2 - 2016-2017)tehpohkeeNo ratings yet
- Assignment LogbookDocument1 pageAssignment LogbooktehpohkeeNo ratings yet
- NotesDocument1 pageNotestehpohkeeNo ratings yet
- Notes PDFDocument1 pageNotes PDFtehpohkeeNo ratings yet
- Group Leader and Schedule (Trimester 2 - 2015-2016)Document2 pagesGroup Leader and Schedule (Trimester 2 - 2015-2016)tehpohkeeNo ratings yet
- Tutorial 4Document2 pagesTutorial 4tehpohkee50% (2)
- TransportDocument2 pagesTransporttehpohkee100% (1)
- Lab Sheet PDFDocument9 pagesLab Sheet PDFtehpohkeeNo ratings yet
- Assignment 1 QuestionDocument1 pageAssignment 1 QuestiontehpohkeeNo ratings yet
- ICE 1 Lab Report Submission: Procedure, Results, Data Analysis and Discussion, Conclusion, and ReferenceDocument7 pagesICE 1 Lab Report Submission: Procedure, Results, Data Analysis and Discussion, Conclusion, and ReferencetehpohkeeNo ratings yet
- Modelling From Data: Saras.K, IU, 2011Document2 pagesModelling From Data: Saras.K, IU, 2011tehpohkeeNo ratings yet
- 4500 - ICE 2 Lab Report GuidelineDocument1 page4500 - ICE 2 Lab Report GuidelinetehpohkeeNo ratings yet
- 'Hwhfwlrqriurwrulpedodqfhlqurwruehdulqj V/VwhpxvlqjpxowlvhqvruyleudwlrqvljqdwxuhDocument6 pages'Hwhfwlrqriurwrulpedodqfhlqurwruehdulqj V/VwhpxvlqjpxowlvhqvruyleudwlrqvljqdwxuhtehpohkeeNo ratings yet
- 4502 - EME 4096 Lab Marking SchemeDocument1 page4502 - EME 4096 Lab Marking SchemetehpohkeeNo ratings yet
- Principal StressesDocument13 pagesPrincipal StressestehpohkeeNo ratings yet
- South Australian Matriculation: Submission Date: May 25, 2012Document5 pagesSouth Australian Matriculation: Submission Date: May 25, 2012tehpohkeeNo ratings yet
- Deflection of BeamsDocument50 pagesDeflection of Beamstehpohkee100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- External Loads Chapter 3 - Airframe Stress Analysis and Sizing (Niu) & Chapter 3 - Airframe Structural Design (Niu)Document19 pagesExternal Loads Chapter 3 - Airframe Stress Analysis and Sizing (Niu) & Chapter 3 - Airframe Structural Design (Niu)sqaiba_gNo ratings yet
- Assignment in ThermodynamicsDocument11 pagesAssignment in ThermodynamicsMark LourenceNo ratings yet
- Physical Education and Health 3: Introduction To DanceDocument21 pagesPhysical Education and Health 3: Introduction To DanceMitch Panganiban Togni67% (3)
- Bloc 2 External Factors To Take Care Of: Squat Bench Press DeadliftDocument24 pagesBloc 2 External Factors To Take Care Of: Squat Bench Press DeadliftweasjNo ratings yet
- Newton'S Laws of MotionDocument49 pagesNewton'S Laws of Motionbae joohyunNo ratings yet
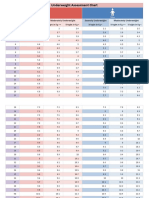
- Underweight Assessment Chart: Weight in KG Weight in KG Weight in KGDocument3 pagesUnderweight Assessment Chart: Weight in KG Weight in KG Weight in KGYuvraj GargNo ratings yet
- Economic Traits of Layers and BroilersDocument35 pagesEconomic Traits of Layers and Broilersyaseen50% (2)
- Quantities, Units, and MeasurementDocument8 pagesQuantities, Units, and MeasurementTriacute80% (5)
- NCM 107 Newborn SkillsDocument5 pagesNCM 107 Newborn Skillsevangdelacruz1010No ratings yet
- Basic ThermodynamicsDocument1 pageBasic ThermodynamicsJim Albert De Asis100% (1)
- 1 11 Balsa Wood TowerDocument5 pages1 11 Balsa Wood TowerMuhammad irfan javaid100% (1)
- Lecture Notes 1 - Fluid Mechanics - 1Document8 pagesLecture Notes 1 - Fluid Mechanics - 1Jane AndaNo ratings yet
- M.Owais - 18EL46 (Assignment 2)Document6 pagesM.Owais - 18EL46 (Assignment 2)Islam CandleNo ratings yet
- Geach - The Third Man Again (Discussion of Gregory Vlastos)Document12 pagesGeach - The Third Man Again (Discussion of Gregory Vlastos)Otman1No ratings yet
- TP-SA-004 Loss On Drying-PHDocument2 pagesTP-SA-004 Loss On Drying-PHjovanna yNo ratings yet
- Notes On Criminological Research 1Document9 pagesNotes On Criminological Research 1sagesagesausageNo ratings yet
- Chapter 5 Turning Effect of ForcesDocument5 pagesChapter 5 Turning Effect of ForcesM Farhan KhanNo ratings yet
- Porcentaje de Grasa Corporal)Document5 pagesPorcentaje de Grasa Corporal)Yeicob ZubiaNo ratings yet
- The Biofield: A Different Type of MagnetismDocument6 pagesThe Biofield: A Different Type of MagnetisminergetixNo ratings yet
- Surveying (Activity 4-13)Document12 pagesSurveying (Activity 4-13)Dexter AlarconNo ratings yet
- Manual of Aggregate and Concrete TestingDocument32 pagesManual of Aggregate and Concrete TestingFrengkiNo ratings yet
- Pretest PosttestDocument5 pagesPretest PosttestMikasa AckermanNo ratings yet
- Food Weight and MeasurementsDocument5 pagesFood Weight and Measurementsangelic riveraNo ratings yet
- Science Grade 6 Mock ExamDocument12 pagesScience Grade 6 Mock ExamELLENNo ratings yet
- 2023 2025 SyllabusDocument36 pages2023 2025 SyllabusAnoushka AgarwalNo ratings yet
- FluidsDocument1 pageFluidsFrancin Mae Boholst DomaelNo ratings yet
- 6-12-25 ProgramDocument24 pages6-12-25 ProgramJohn Nixon100% (4)
- Group 1Document60 pagesGroup 1Adriel MarasiganNo ratings yet
- Balance and Gravitational CurveDocument11 pagesBalance and Gravitational CurveMary Joy CenizaNo ratings yet
- 12 Week Free Bodybuilding Program Part 1Document4 pages12 Week Free Bodybuilding Program Part 1secondtexanNo ratings yet