You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Parallel GP Um at LabDocument86 pagesParallel GP Um at LabVedant DubeyNo ratings yet
- 1 Servo ControlDocument22 pages1 Servo ControlKunal DuttNo ratings yet
- ThesisDocument209 pagesThesisVedant DubeyNo ratings yet
- Moderncontroltheory BakshiDocument386 pagesModerncontroltheory Bakshivartanami100% (3)
- Bleed 2Document8 pagesBleed 2Vedant DubeyNo ratings yet
- J Barbosa Thesis 1987Document202 pagesJ Barbosa Thesis 1987Vedant DubeyNo ratings yet
- Potential Flow 2-Dimensional Vortex Panel Model: Applications To WingmillsDocument55 pagesPotential Flow 2-Dimensional Vortex Panel Model: Applications To WingmillsVedant DubeyNo ratings yet
- Lift Coefficients Vs Distance in Semi Chords: Circulatory Lift Total Lift Coefficient RT JonesDocument1 pageLift Coefficients Vs Distance in Semi Chords: Circulatory Lift Total Lift Coefficient RT JonesVedant DubeyNo ratings yet
- Equation From Keynote 1Document1 pageEquation From Keynote 1Vedant DubeyNo ratings yet
- Ece 515 ControlDocument5 pagesEce 515 ControlVedant DubeyNo ratings yet
- Sharp interface immersed boundary method for complex flowsDocument28 pagesSharp interface immersed boundary method for complex flowsVedant DubeyNo ratings yet
- 1 Servo ControlDocument22 pages1 Servo ControlKunal DuttNo ratings yet
- OutDocument137 pagesOutVedant DubeyNo ratings yet
- AIAA20050085Document11 pagesAIAA20050085api-3800845No ratings yet
- Panel Methods ExplainedDocument19 pagesPanel Methods Explainedchandru_anniyanNo ratings yet
- Accessing CHM FilesDocument1 pageAccessing CHM FilesVedant DubeyNo ratings yet
- Parliamentary Debate RulesDocument3 pagesParliamentary Debate RulesVedant DubeyNo ratings yet
- Application Deadlines For MS in Aerospace EngineeringDocument2 pagesApplication Deadlines For MS in Aerospace EngineeringVedant DubeyNo ratings yet
- ICEM-Intro 15.0 WS4.3 Femur BFC PDFDocument17 pagesICEM-Intro 15.0 WS4.3 Femur BFC PDFVedant DubeyNo ratings yet
- BwbkasapanaDocument153 pagesBwbkasapanaVedant DubeyNo ratings yet
- 2 Encoder Primer1Document59 pages2 Encoder Primer1Vedant DubeyNo ratings yet
- 1124 RA12 Pages BrochureDocument16 pages1124 RA12 Pages BrochureGoanengineerNo ratings yet
- Xmauclere MasterthesisDocument47 pagesXmauclere MasterthesismurdplacidNo ratings yet
- Using Computational Fluid Dynamics For AerodynamicsDocument10 pagesUsing Computational Fluid Dynamics For Aerodynamicsprens22748No ratings yet
- 2011DBF PurdueUniversity GolfstreamDocument58 pages2011DBF PurdueUniversity GolfstreamolafpalmerNo ratings yet
- Background Note For Dialogue On Industrial PollutionDocument1 pageBackground Note For Dialogue On Industrial PollutionVedant DubeyNo ratings yet
- CFD Analysis in A Heat Sink For Cooling Of-LibreDocument11 pagesCFD Analysis in A Heat Sink For Cooling Of-LibreVedant DubeyNo ratings yet
- 4 - Coupled Structural - Thermal AnalysisDocument8 pages4 - Coupled Structural - Thermal AnalysisBaljinder SinghNo ratings yet
- Stability & Control Deriv EstDocument34 pagesStability & Control Deriv EstScramblejamsNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Schematic Diagrams For Philips CD753Document12 pagesSchematic Diagrams For Philips CD753knightmare88100% (1)
- Lenovo z480 Dalz2amb8f0 Quanta Lz2Document44 pagesLenovo z480 Dalz2amb8f0 Quanta Lz2ShhphdNo ratings yet
- Deutz TCG2032 Limit ValuesDocument19 pagesDeutz TCG2032 Limit ValuesKhokon Kumer SahaNo ratings yet
- Chapter 2newDocument134 pagesChapter 2newBelayneh TadesseNo ratings yet
- HYW-20 T5: Generating RatesDocument12 pagesHYW-20 T5: Generating RatesRagowo Tri WicaksonoNo ratings yet
- Kenworth P92-4319 B Cab Wiring DiagramDocument18 pagesKenworth P92-4319 B Cab Wiring DiagramHarlinton descalzi94% (18)
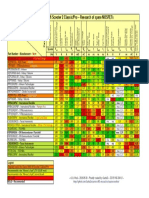
- Xiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30Document1 pageXiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30JGSoftNo ratings yet
- 1.1 KV Cable Voltage Drope CalculationDocument3 pages1.1 KV Cable Voltage Drope CalculationParmod SainiNo ratings yet
- PTCL Vendor Registration FormDocument30 pagesPTCL Vendor Registration FormHarisAslam100% (1)
- SWT 2000 LeafletDocument4 pagesSWT 2000 LeafletphucgenjiNo ratings yet
- RT310i FULL MANUAL UK V005-Revied-1 PDFDocument23 pagesRT310i FULL MANUAL UK V005-Revied-1 PDFsekula_zrNo ratings yet
- Commercial Vehicle Aftermarket Catalog en UsDocument56 pagesCommercial Vehicle Aftermarket Catalog en UsAion RadamanthysNo ratings yet
- 2015 K2500 ManualDocument283 pages2015 K2500 ManualRinto SilalahiNo ratings yet
- Crushing Plant For Sale1Document18 pagesCrushing Plant For Sale1Vicky NonatoNo ratings yet
- Slip Ring PresentationDocument12 pagesSlip Ring PresentationMynampati Sai SrinivasNo ratings yet
- Tissue SectioningDocument21 pagesTissue SectioningGirum TesfayeNo ratings yet
- P200h2-P220he2 (1) 001Document4 pagesP200h2-P220he2 (1) 001Carlos José Barrios InfanteNo ratings yet
- Electrical DevicesDocument123 pagesElectrical Devicesnavidelec100% (1)
- Bluetooth Smart Car ManualDocument50 pagesBluetooth Smart Car ManualDiacono10No ratings yet
- 6e Engine Start BatteryDocument6 pages6e Engine Start BatteryJegadeshwaran RNo ratings yet
- Solideal Ed Plus: by CamsoDocument4 pagesSolideal Ed Plus: by CamsoK-Tune Automotive ServicesNo ratings yet
- Brosur Elmo t3Document2 pagesBrosur Elmo t3ANISA DESYNo ratings yet
- Manual Urc8210 EnglishDocument58 pagesManual Urc8210 Englishkeefy100No ratings yet
- ISO Standards ListDocument13 pagesISO Standards ListviahulNo ratings yet
- Static Relays: Prepared byDocument56 pagesStatic Relays: Prepared byLavanyaNo ratings yet
- CAT 3208-TroubleshootingDocument8 pagesCAT 3208-TroubleshootingMiguel Angel SanchoNo ratings yet
- Eaton F 5405B DM3 Transmission Service ManualDocument458 pagesEaton F 5405B DM3 Transmission Service ManualMauricio DuranNo ratings yet
- Truck Tire Data BookDocument130 pagesTruck Tire Data Bookrashom0099088No ratings yet
- Mechanics of Flight by A.C KermodeDocument2 pagesMechanics of Flight by A.C KermodeJhony BhatNo ratings yet
- Computer Repair Guide: Hardware & Software SolutionsDocument24 pagesComputer Repair Guide: Hardware & Software SolutionsWilma Arenas Montes100% (1)