You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- AMFI Sample 500 QuestionsDocument36 pagesAMFI Sample 500 Questionssukriti_43784905100% (3)
- Introduction To Succession-1Document8 pagesIntroduction To Succession-1amun dinNo ratings yet
- Aci 207.1Document38 pagesAci 207.1safak kahraman100% (7)
- Sample Property Management AgreementDocument13 pagesSample Property Management AgreementSarah TNo ratings yet
- New Installation Procedures - 2Document156 pagesNew Installation Procedures - 2w00kkk100% (2)
- Option Chain Analysis in Trading - Dot Net TutorialsDocument19 pagesOption Chain Analysis in Trading - Dot Net Tutorialsaaditya01100% (1)
- Ata 36 PDFDocument149 pagesAta 36 PDFAyan Acharya100% (2)
- Business Case - Uganda Maize Export To South SudanDocument44 pagesBusiness Case - Uganda Maize Export To South SudanInfiniteKnowledge33% (3)
- Complaint Handling Policy and ProceduresDocument2 pagesComplaint Handling Policy and Proceduresjyoti singhNo ratings yet
- UW Computational-Finance & Risk Management Brochure Final 080613Document2 pagesUW Computational-Finance & Risk Management Brochure Final 080613Rajel MokNo ratings yet
- Banker and Customer Relationship PDFDocument25 pagesBanker and Customer Relationship PDFaaditya01No ratings yet
- Benefits of Customer Relationship ManagementDocument14 pagesBenefits of Customer Relationship Managementaaditya01No ratings yet
- Imes Discussion Paper Series: On The Risk Capital Framework of Financial InstitutionsDocument33 pagesImes Discussion Paper Series: On The Risk Capital Framework of Financial Institutionsaaditya01No ratings yet
- 1Document5 pages1aaditya01No ratings yet
- Uncertainty and Capital Structure DynamicsDocument56 pagesUncertainty and Capital Structure Dynamicsaaditya01No ratings yet
- Apsrtc Data AnalysisDocument34 pagesApsrtc Data Analysisaaditya01No ratings yet
- Insights On Global Challenges and Opportunities For The Century Ahead PDFDocument414 pagesInsights On Global Challenges and Opportunities For The Century Ahead PDFaaditya01No ratings yet
- Insights On Global Challenges and Opportunities For The Century Ahead PDFDocument414 pagesInsights On Global Challenges and Opportunities For The Century Ahead PDFaaditya01No ratings yet
- 4Document4 pages4aaditya01No ratings yet
- Goal ProgrammingDocument3 pagesGoal Programmingaaditya01No ratings yet
- F 08 FDocument5 pagesF 08 Faaditya01No ratings yet
- 3Document4 pages3aaditya01No ratings yet
- Basel III challenges for Indian banksDocument16 pagesBasel III challenges for Indian banksOsama AzNo ratings yet
- Iim 2015010915121988Document7 pagesIim 2015010915121988aaditya01No ratings yet
- Non Parametric MethodDocument35 pagesNon Parametric MethodKyai MbethikNo ratings yet
- 3 Benefits of Cloud Computing For Human Resources (VIDEO)Document2 pages3 Benefits of Cloud Computing For Human Resources (VIDEO)aaditya01No ratings yet
- 79 84Document6 pages79 84aaditya01No ratings yet
- Bendre PDFDocument25 pagesBendre PDFaaditya01No ratings yet
- E-Commerce or Internet Marketing: A Business Review From Indian ContextDocument8 pagesE-Commerce or Internet Marketing: A Business Review From Indian Contexthfs5358No ratings yet
- Online Marketing SpecialeDocument120 pagesOnline Marketing SpecialeOara SergiuNo ratings yet
- 4 Ijsrm PDFDocument9 pages4 Ijsrm PDFBheeshm SinghNo ratings yet
- StudZinKonf Yurovskiy PDFDocument12 pagesStudZinKonf Yurovskiy PDFsheefaNo ratings yet
- Destination Branding N InternetDocument79 pagesDestination Branding N InternetJazzyMaggiNo ratings yet
- 12 Chapter 3Document27 pages12 Chapter 3aaditya01No ratings yet
- 2001 Furrer Sudharshan Qualitative Market ResearchDocument7 pages2001 Furrer Sudharshan Qualitative Market ResearchNakulAggarwalNo ratings yet
- A Framework For Building Brand Equity Online For Pure-Play B2C Retailers and ServicesDocument10 pagesA Framework For Building Brand Equity Online For Pure-Play B2C Retailers and Servicesaaditya01No ratings yet
- Esther Final After DefenceDocument78 pagesEsther Final After Defenceaaditya01No ratings yet
- 605 DDocument16 pages605 Daaditya01No ratings yet
- Meanwhile Elsewhere - Lizzie Le Blond.1pdfDocument1 pageMeanwhile Elsewhere - Lizzie Le Blond.1pdftheyomangamingNo ratings yet
- 3.4 Spending, Saving and Borrowing: Igcse /O Level EconomicsDocument9 pages3.4 Spending, Saving and Borrowing: Igcse /O Level EconomicsRingle JobNo ratings yet
- Analyze Oil Wear DebrisDocument2 pagesAnalyze Oil Wear Debristhoma111sNo ratings yet
- Oop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Document14 pagesOop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Hashir KhanNo ratings yet
- Dinsmore - Gantt ChartDocument1 pageDinsmore - Gantt Chartapi-592162739No ratings yet
- APM Terminals Safety Policy SummaryDocument1 pageAPM Terminals Safety Policy SummaryVaviNo ratings yet
- Super Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasDocument5 pagesSuper Flexible, Super Fast, Super Value: Gigabit PTMP Client and PTP With Modular AntennasAbdallaNo ratings yet
- Gary Mole and Glacial Energy FraudDocument18 pagesGary Mole and Glacial Energy Fraudskyy22990% (1)
- Top Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Document1 pageTop Brand Story Bar Supervisor Jobs Chennai Apply Now Latest Fresher Experienced Bar Supervisor Jobs in Various Location July 18 2021Surya JamesNo ratings yet
- AnkitDocument24 pagesAnkitAnkit MalhotraNo ratings yet
- Project The Ant Ranch Ponzi Scheme JDDocument7 pagesProject The Ant Ranch Ponzi Scheme JDmorraz360No ratings yet
- Piping ForemanDocument3 pagesPiping ForemanManoj MissileNo ratings yet
- Distribution of Laptop (Ha-Meem Textiles Zone)Document3 pagesDistribution of Laptop (Ha-Meem Textiles Zone)Begum Nazmun Nahar Juthi MozumderNo ratings yet
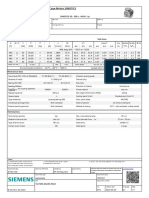
- 1LE1503-2AA43-4AA4 Datasheet enDocument1 page1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNo ratings yet
- I. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTDocument2 pagesI. ICT (Information & Communication Technology: LESSON 1: Introduction To ICTEissa May VillanuevaNo ratings yet
- Fujitsu Spoljni Multi Inverter Aoyg45lbt8 Za 8 Unutrasnjih Jedinica KatalogDocument4 pagesFujitsu Spoljni Multi Inverter Aoyg45lbt8 Za 8 Unutrasnjih Jedinica KatalogSasa021gNo ratings yet
- Bernardo Corporation Statement of Financial Position As of Year 2019 AssetsDocument3 pagesBernardo Corporation Statement of Financial Position As of Year 2019 AssetsJean Marie DelgadoNo ratings yet
- Usa Easa 145Document31 pagesUsa Easa 145Surya VenkatNo ratings yet
- Overall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarDocument2 pagesOverall Dimensions and Mounting: Solar Water Pump Controller Mu - G3 Solar Mu - G5 Solar Mu - G7.5 Solar Mu - G10 SolarVishak ThebossNo ratings yet
- Bentone 30 Msds (Eu-Be)Document6 pagesBentone 30 Msds (Eu-Be)Amir Ososs0% (1)
- 50TS Operators Manual 1551000 Rev CDocument184 pages50TS Operators Manual 1551000 Rev CraymondNo ratings yet
- "60 Tips On Object Oriented Programming" BrochureDocument1 page"60 Tips On Object Oriented Programming" BrochuresgganeshNo ratings yet