You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Digital Signal and Image Processing: MSC Students Seminar ProposalsDocument1 pageDigital Signal and Image Processing: MSC Students Seminar Proposalsاحمد مظفرNo ratings yet
- Neural Network Lec10Document37 pagesNeural Network Lec10احمد مظفرNo ratings yet
- Neural Networks Lecture 9: Designing Controller Using Neural NetworksDocument31 pagesNeural Networks Lecture 9: Designing Controller Using Neural Networksاحمد مظفرNo ratings yet
- Neural Network Lec7Document58 pagesNeural Network Lec7احمد مظفرNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Decision Trees and Random ForestDocument79 pagesDecision Trees and Random ForestDeekshita What about the second layerNo ratings yet
- 6 05 Undercomplete Vs Overcomplete Hidden LayerDocument4 pages6 05 Undercomplete Vs Overcomplete Hidden LayerNiraj ReginaldNo ratings yet
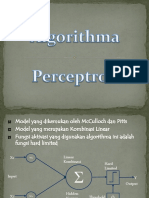
- Percept RonDocument53 pagesPercept RonFarhan AuliaNo ratings yet
- Perceptron NetworkDocument26 pagesPerceptron NetworkJohnNo ratings yet
- Contoh Hasil SpssDocument7 pagesContoh Hasil SpssAchy BiNo ratings yet
- Ms. Mehroz Sadiq: 11/23/2020 Bahria University Islamabad 1Document75 pagesMs. Mehroz Sadiq: 11/23/2020 Bahria University Islamabad 1uxamaNo ratings yet
- Batik Classification Using Deep Convolutional NetwDocument8 pagesBatik Classification Using Deep Convolutional NetwNaraNo ratings yet
- Types of Pruning TechniquesDocument10 pagesTypes of Pruning TechniquesSmriti PiyushNo ratings yet
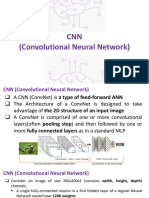
- 03 CNNDocument33 pages03 CNNaldi afrizalNo ratings yet
- CNN Basic Beak of BirdDocument20 pagesCNN Basic Beak of BirdPoralla priyanka100% (1)
- TB - 04 - Superwised LearningDocument24 pagesTB - 04 - Superwised LearningMOHANNo ratings yet
- 50 Deep Learning Technical Interview Questions With AnswersDocument20 pages50 Deep Learning Technical Interview Questions With AnswersIkram Laaroussi100% (1)
- For SeminarDocument17 pagesFor SeminarAnsh BaldeNo ratings yet
- Deep Learning HandoutDocument6 pagesDeep Learning HandoutKHAN AZHAR ATHAR100% (1)
- Datamining-Lect5 Decision TreeDocument38 pagesDatamining-Lect5 Decision Treeblack smithNo ratings yet
- KNN - Model: Train Test CL KDocument2 pagesKNN - Model: Train Test CL KGeethaSrinivasanNo ratings yet
- Machine Learning NotesDocument5 pagesMachine Learning NotesYash GandharvNo ratings yet
- Topic 5 - Part1 Multilayer PerceptronDocument28 pagesTopic 5 - Part1 Multilayer Perceptronﻣﺤﻤﺪ الخميسNo ratings yet
- Neural Networks: Chapter 20, Section 5Document21 pagesNeural Networks: Chapter 20, Section 5api-19801502No ratings yet
- Improving The Performance of CBIR Using XGBoost Classifier With Deep CNN-Based Feature ExtractionDocument6 pagesImproving The Performance of CBIR Using XGBoost Classifier With Deep CNN-Based Feature ExtractionYI JIE ONGNo ratings yet
- Template For PHIL IRI Post TestDocument4 pagesTemplate For PHIL IRI Post TestAiza QuelangNo ratings yet
- NEURAL NETWORKS Basics Using MatlabDocument51 pagesNEURAL NETWORKS Basics Using Matlabsreemd100% (2)
- Convolutional Neural Networks: Computer Vision CS 543 / ECE 549 University of Illinois Jia-Bin HuangDocument76 pagesConvolutional Neural Networks: Computer Vision CS 543 / ECE 549 University of Illinois Jia-Bin HuangVũ Mạnh CườngNo ratings yet
- Question ExampleDocument10 pagesQuestion Exampleali.nabeel246230No ratings yet
- CC511 Week 5 - 6 - NN - BPDocument62 pagesCC511 Week 5 - 6 - NN - BPmohamed sherifNo ratings yet
- Decision Tree Induction For Financial Fraud Detection Using Ensemble Learning TechniquesDocument15 pagesDecision Tree Induction For Financial Fraud Detection Using Ensemble Learning Techniquesvijayalakshmi_raoNo ratings yet
- Ensemble LearningDocument7 pagesEnsemble LearningGabriel Gheorghe100% (1)
- Algoritma PerceptronDocument17 pagesAlgoritma PerceptronSatriaGenzRevolutionsNo ratings yet
- Kursus Deep LearningDocument108 pagesKursus Deep LearninghendrigantingNo ratings yet
- CSE1015 - Machine Learning Essentials: J Component ReportDocument18 pagesCSE1015 - Machine Learning Essentials: J Component Reportvamsi viswanadhNo ratings yet