You might also like
- The Passion Test WorkbookDocument29 pagesThe Passion Test Workbookmoscowstar89% (9)
- Experiment of The Biefield-Brown Effect Using Symmetric Plate Capacitors Charged Below 35kVDocument8 pagesExperiment of The Biefield-Brown Effect Using Symmetric Plate Capacitors Charged Below 35kVLuis Alberto MiglioreroNo ratings yet
- Documentation 2.1 en Us System RequirementsDocument54 pagesDocumentation 2.1 en Us System RequirementsFernando EngelmannNo ratings yet
- Structural Analysis of Pull-Up BarDocument13 pagesStructural Analysis of Pull-Up BarBannu SastryNo ratings yet
- Genetic Algorithms and Their Applications-AsifDocument11 pagesGenetic Algorithms and Their Applications-Asifarshiya65No ratings yet
- Evolutionary Computation: 131: Ajith AbrahamDocument12 pagesEvolutionary Computation: 131: Ajith AbrahamTeruã LuizNo ratings yet
- Genetic Algorithms: 4.1 Quick OverviewDocument12 pagesGenetic Algorithms: 4.1 Quick Overviewseunnuga93No ratings yet
- SC Unit 5Document19 pagesSC Unit 5rwt91848No ratings yet
- Genetic Algorithm: A Search of Complex SpacesDocument5 pagesGenetic Algorithm: A Search of Complex Spacesjehana_bethNo ratings yet
- Single Vs MultiobjectiveDocument43 pagesSingle Vs MultiobjectiveBetty NagyNo ratings yet
- Applying genetic algorithms to solve fuzzy optimization problemsDocument15 pagesApplying genetic algorithms to solve fuzzy optimization problemstissatomNo ratings yet
- Genetic AlgorithmDocument18 pagesGenetic Algorithmjoshuapeter961204No ratings yet
- The Genetic Algorithm For Finding The Maxima of Single-Variable FunctionsDocument9 pagesThe Genetic Algorithm For Finding The Maxima of Single-Variable FunctionsinventyNo ratings yet
- Model Order Reduction Using Genetic AlgorithmDocument6 pagesModel Order Reduction Using Genetic AlgorithmAthaur Rahman NajeebNo ratings yet
- The Enhanced Genetic Algorithms For The Optimization Design: Pengfei Guo Xuezhi Wang Yingshi HanDocument5 pagesThe Enhanced Genetic Algorithms For The Optimization Design: Pengfei Guo Xuezhi Wang Yingshi HanSurbhi PaliwalNo ratings yet
- Implement GA to Find x,y,z Values Using PythonDocument7 pagesImplement GA to Find x,y,z Values Using Pythontarun saiNo ratings yet
- Genetic Algorithms for Path Planning in Autonomous Mobile RobotsDocument16 pagesGenetic Algorithms for Path Planning in Autonomous Mobile RobotsLakshman SiripurapuNo ratings yet
- Genetic Algorithm - WikipediaDocument23 pagesGenetic Algorithm - WikipediaAnanka-Ann JongNo ratings yet
- A Genetic Algorithm For Function Optimization - A Matlab ImplementationDocument14 pagesA Genetic Algorithm For Function Optimization - A Matlab ImplementationmahalingamloganathanNo ratings yet
- Real Coded Genetic AlgorithmDocument4 pagesReal Coded Genetic Algorithmanoopeluvathingal100No ratings yet
- Genetic Algorithm: From Wikipedia, The Free EncyclopediaDocument3 pagesGenetic Algorithm: From Wikipedia, The Free Encyclopediaa_44mNo ratings yet
- Bioinformatics FinalfinalDocument15 pagesBioinformatics Finalfinalshravani k sNo ratings yet
- Applying Gene Grouping Genetic Algorithm For Solving Travelling Salesman ProblemDocument5 pagesApplying Gene Grouping Genetic Algorithm For Solving Travelling Salesman ProblemRakeshconclaveNo ratings yet
- lecture1423722821-56-69Document14 pageslecture1423722821-56-69Pavan GuttaNo ratings yet
- Soumen Paul Department of Computer Science and Informatics Haldia Institute of Technology ICARE Complex, HIT Campus, P.O - HIT, PIN 721657 Haldia, West BengalDocument56 pagesSoumen Paul Department of Computer Science and Informatics Haldia Institute of Technology ICARE Complex, HIT Campus, P.O - HIT, PIN 721657 Haldia, West BengalSaurabh ChakrabarthiNo ratings yet
- Introduction To Genetic Algorithms (GA)Document14 pagesIntroduction To Genetic Algorithms (GA)Somya AryaNo ratings yet
- Optimising Frame Structures by Di!erent Strategies of Genetic AlgorithmsDocument22 pagesOptimising Frame Structures by Di!erent Strategies of Genetic AlgorithmsSai RamNo ratings yet
- Ga Perf AnalysisDocument19 pagesGa Perf AnalysisAnonymous TxPyX8cNo ratings yet
- A Directed Genetic Algorithm For Global OptimizationDocument17 pagesA Directed Genetic Algorithm For Global OptimizationParth TrivediNo ratings yet
- Genetic Algorithm: Review and Application: Manoj Kumar, Mohammad Husian, Naveen Upreti & Deepti GuptaDocument4 pagesGenetic Algorithm: Review and Application: Manoj Kumar, Mohammad Husian, Naveen Upreti & Deepti GuptanelsonneymanNo ratings yet
- Ga TutorialDocument37 pagesGa Tutorialgreenday3No ratings yet
- Genetic AlgorithmDocument8 pagesGenetic AlgorithmFabiano Rodrigues PereiraNo ratings yet
- Optimization Method Based On Genetic AlgorithmsDocument16 pagesOptimization Method Based On Genetic Algorithmsdavidrajan0007No ratings yet
- Genetic AlgorithmDocument23 pagesGenetic Algorithmdivya2020No ratings yet
- A Genetic Algorithm For Function Optimization: A Matlab ImplementationDocument14 pagesA Genetic Algorithm For Function Optimization: A Matlab ImplementationKetan RsNo ratings yet
- A Genetic Algorithm Tutorial: Stat&tics and ComputingDocument21 pagesA Genetic Algorithm Tutorial: Stat&tics and ComputingkranthikoyyadaNo ratings yet
- Genetic AlgorithmsDocument37 pagesGenetic AlgorithmsIrina AlexandraNo ratings yet
- Expert Systems With Applications: Haijun Su, Yupu Yang, Liang ZhaoDocument7 pagesExpert Systems With Applications: Haijun Su, Yupu Yang, Liang ZhaoAnonymous TxPyX8cNo ratings yet
- Improved Based Differential Evolution Algorithm Using New Environment Adaption OperatorDocument11 pagesImproved Based Differential Evolution Algorithm Using New Environment Adaption OperatorthesisdatasetmailNo ratings yet
- Differential Evolution For Multiobjective OptimizatiorDocument8 pagesDifferential Evolution For Multiobjective OptimizatiorLucasNo ratings yet
- Paper6 Final+Document15 pagesPaper6 Final+Emmanuel SaweNo ratings yet
- Adaptative Range Genetic Algorithm (ARGA) For Design and Economic Optimization of STHE (2019)Document18 pagesAdaptative Range Genetic Algorithm (ARGA) For Design and Economic Optimization of STHE (2019)David C. SouzaNo ratings yet
- Genetic Algorithm Optimization and Its Application To Antenna DesignDocument4 pagesGenetic Algorithm Optimization and Its Application To Antenna DesignÉtoile FilanteNo ratings yet
- Genetic K-Means Algorithm: Conf., 1987, Pp. 50-58Document7 pagesGenetic K-Means Algorithm: Conf., 1987, Pp. 50-58Janie FontanillaNo ratings yet
- Genetic Algorithm ReportDocument26 pagesGenetic Algorithm ReportEr Vijeta NarwalNo ratings yet
- GA Adaptive TechniquesDocument23 pagesGA Adaptive TechniquesAjay SenNo ratings yet
- Choosing Mutation and Crossover Ratios for Genetic Algorithms—A Review with a New Dynamic ApproachDocument36 pagesChoosing Mutation and Crossover Ratios for Genetic Algorithms—A Review with a New Dynamic ApproachJogo da VelhaNo ratings yet
- Information: Choosing Mutation and Crossover Ratios For Genetic Algorithms-A Review With A New Dynamic ApproachDocument36 pagesInformation: Choosing Mutation and Crossover Ratios For Genetic Algorithms-A Review With A New Dynamic ApproachOlivia brianneNo ratings yet
- RePAMO PDFDocument19 pagesRePAMO PDFRonald JosephNo ratings yet
- Genetic Algorithm-Based Structural Form ExplorationDocument8 pagesGenetic Algorithm-Based Structural Form ExplorationPatrycja MicheraNo ratings yet
- 1 s2.0 S0957417421017486 MainDocument26 pages1 s2.0 S0957417421017486 MainSuman DasNo ratings yet
- Introduction To Optimization: What Are Genetic Algorithms?Document15 pagesIntroduction To Optimization: What Are Genetic Algorithms?kinnukiranNo ratings yet
- Survey of Bio Inspired Optimization AlgorithmsDocument15 pagesSurvey of Bio Inspired Optimization AlgorithmsAswathy Cj0% (1)
- Review of Crossover Operators in Genetic Algorithms for TSPDocument3 pagesReview of Crossover Operators in Genetic Algorithms for TSPAmbica AnnavarapuNo ratings yet
- Genetic algorithm tutorial covers canonical GA and extensionsDocument37 pagesGenetic algorithm tutorial covers canonical GA and extensionszaidNo ratings yet
- GWO FinalversionDocument24 pagesGWO FinalversionSayantan SinhaNo ratings yet
- A Modified Real Coded Genetic Algorithm For ConstrainedDocument26 pagesA Modified Real Coded Genetic Algorithm For ConstrainedgkgjNo ratings yet
- Literature Review Genetic AlgorithmDocument6 pagesLiterature Review Genetic Algorithmafdtorpqk100% (1)
- Genetic AlgorithmDocument14 pagesGenetic AlgorithmRoshan DahalNo ratings yet
- A Pseudo Genetic Algorithm For Solving Best Path Problem: Behzadi@sina - Kntu.ac - Ir Alesheikh@kntu - Ac.irDocument4 pagesA Pseudo Genetic Algorithm For Solving Best Path Problem: Behzadi@sina - Kntu.ac - Ir Alesheikh@kntu - Ac.irGurinder Pal SinghNo ratings yet
- Multilevel Techniques For The Clustering ProblemDocument15 pagesMultilevel Techniques For The Clustering ProblemCS & ITNo ratings yet
- MOGADocument24 pagesMOGAPradeep BediNo ratings yet
- All-Solid-State High Performance Asymmetric Supercapacitors Based On Novel Mns Nanocrystal and Activated Carbon MaterialsDocument9 pagesAll-Solid-State High Performance Asymmetric Supercapacitors Based On Novel Mns Nanocrystal and Activated Carbon MaterialsLuis Alberto MiglioreroNo ratings yet
- Limiteteoricodeproplsorcuantico PDFDocument7 pagesLimiteteoricodeproplsorcuantico PDFLuis Alberto MiglioreroNo ratings yet
- Quantum Vacuum ThrusterDocument5 pagesQuantum Vacuum ThrusterLuis Alberto MiglioreroNo ratings yet
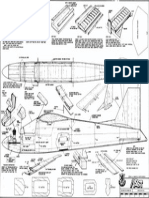
- P-51D Mustang 36inDocument1 pageP-51D Mustang 36inLuis Alberto MiglioreroNo ratings yet
- Mastering Chess and Shogi by Self-Play With A General Reinforcement Learning AlgorithmDocument19 pagesMastering Chess and Shogi by Self-Play With A General Reinforcement Learning Algorithmeldelmoño luciNo ratings yet
- B2 SpiritDocument4 pagesB2 SpiritLuis Alberto Migliorero100% (2)
- Us 20070170798 A 1 Levitron 2Document17 pagesUs 20070170798 A 1 Levitron 2Luis Alberto MiglioreroNo ratings yet
- Capacitores SimetricosDocument15 pagesCapacitores SimetricosLuis Alberto MiglioreroNo ratings yet
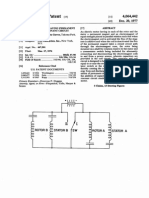
- 4033Document11 pages4033shivangikhatana90No ratings yet
- P-51D Mustang 36inDocument1 pageP-51D Mustang 36inLuis Alberto MiglioreroNo ratings yet
- SST 33inDocument1 pageSST 33inLuis Alberto MiglioreroNo ratings yet
- Glue & Cut Red Numbered PartsDocument1 pageGlue & Cut Red Numbered PartsLuis Alberto MiglioreroNo ratings yet
- The Role of Intelligence For Performance in The Prototypical Expertise Domain of Chess (2013) by Roland H. GrabnerDocument8 pagesThe Role of Intelligence For Performance in The Prototypical Expertise Domain of Chess (2013) by Roland H. GrabnerLuis Alberto MiglioreroNo ratings yet
- A Word To Third World War: A Clarification by Billy MeierDocument2 pagesA Word To Third World War: A Clarification by Billy MeierLuis Alberto MiglioreroNo ratings yet
- Experiments W Spiral Magnet Motors Wankel WholeDocument46 pagesExperiments W Spiral Magnet Motors Wankel Wholetony74193100% (1)
- Teoria Del TodoDocument428 pagesTeoria Del TodoLuis Alberto MiglioreroNo ratings yet
- P Saab ViggenDocument10 pagesP Saab ViggenLuis Alberto MiglioreroNo ratings yet
- Charged Supercapacitor PDFDocument4 pagesCharged Supercapacitor PDFLuciano DicksonNo ratings yet
- Kin Ect I Ccu An Tum Gravity TheoryDocument11 pagesKin Ect I Ccu An Tum Gravity TheoryLuis Alberto MiglioreroNo ratings yet
- Us 4064442 Motor Ke PpeDocument8 pagesUs 4064442 Motor Ke PpeLuis Alberto MiglioreroNo ratings yet
- Us 4064442 Motor Ke PpeDocument8 pagesUs 4064442 Motor Ke PpeLuis Alberto MiglioreroNo ratings yet
- EFtyphoonDocument1 pageEFtyphoonamedraayNo ratings yet
- Mig 144 de Sen Cripta DoDocument4 pagesMig 144 de Sen Cripta DoLuis Alberto MiglioreroNo ratings yet
- P Saab ViggenDocument10 pagesP Saab ViggenLuis Alberto MiglioreroNo ratings yet
- Developing An Adaptive Chess Program PDFDocument66 pagesDeveloping An Adaptive Chess Program PDFLuis Alberto MiglioreroNo ratings yet
- EFtyphoonDocument1 pageEFtyphoonamedraayNo ratings yet
- B2 SpiritDocument4 pagesB2 SpiritLuis Alberto Migliorero100% (2)
- Fex GuideDocument60 pagesFex Guidejambor_istvanNo ratings yet
- BMS for Electric Vehicles: Functions, Topologies, Cell Balancing and SafetyDocument19 pagesBMS for Electric Vehicles: Functions, Topologies, Cell Balancing and Safetyvarun sharma100% (1)
- PAYWARE CONNECT ManualDocument395 pagesPAYWARE CONNECT ManualgrachuelaNo ratings yet
- Benchmarking Single-Point Performance On National Instruments Real-Time HardwareDocument8 pagesBenchmarking Single-Point Performance On National Instruments Real-Time HardwaremafmonteNo ratings yet
- Create3 Welcome GuideDocument8 pagesCreate3 Welcome GuidePisoli IppalsNo ratings yet
- Windows Forensics: Dr. Phil Polstra @ppolstra PHD, Cissp, CehDocument15 pagesWindows Forensics: Dr. Phil Polstra @ppolstra PHD, Cissp, CehkarlaNo ratings yet
- Menards Application Cover LetterDocument5 pagesMenards Application Cover Letteruifujzhfg100% (2)
- Oracle HCM Cloud: Importing Data: license to use this Student GuideฺDocument106 pagesOracle HCM Cloud: Importing Data: license to use this Student GuideฺMohammed SahadNo ratings yet
- Step 2.4 Canva Crib Sheet v0.4Document2 pagesStep 2.4 Canva Crib Sheet v0.4Abdou OsseniNo ratings yet
- Application of Model Predictive Control in ADocument30 pagesApplication of Model Predictive Control in AThyago EstrabisNo ratings yet
- GUY052 AlarmsDocument11 pagesGUY052 AlarmsdeepakaggairbnbNo ratings yet
- Section/Rate Control Kit Installation Guide: Kit: Sect Rate CTRL Apache 20 Series P/N 911-0011-000Document7 pagesSection/Rate Control Kit Installation Guide: Kit: Sect Rate CTRL Apache 20 Series P/N 911-0011-000Ronald Choque CopagiraNo ratings yet
- Lab ManualDocument24 pagesLab ManualA.Ruba COMPUTER SCIENCE AND ENGINEERINGNo ratings yet
- АТ6103 Mobile Radiation Scanning System: ApplicationDocument4 pagesАТ6103 Mobile Radiation Scanning System: ApplicationHari NurcahyadiNo ratings yet
- 05-PowerBI Lab ManualDocument51 pages05-PowerBI Lab ManualOnelsy Alva100% (1)
- Release Note R-Biopharm Pegasus For Autoblot 1.5.0 RTMDocument5 pagesRelease Note R-Biopharm Pegasus For Autoblot 1.5.0 RTMŞnep Mihai AlexandruNo ratings yet
- STRT-431 Reading Notes 10-5-21Document3 pagesSTRT-431 Reading Notes 10-5-21Drew JohnsonNo ratings yet
- Automata & Complexity Theory Cosc3025: Chapter OneDocument27 pagesAutomata & Complexity Theory Cosc3025: Chapter Oneabebaw ataleleNo ratings yet
- Electronic document circular letter mail mergeDocument2 pagesElectronic document circular letter mail mergeTammy GyaNo ratings yet
- 20743C ENU CompanionDocument179 pages20743C ENU CompanionMarculino LimaNo ratings yet
- Text2 - Human - Communication - in - A - Digital - Age - Per PDFDocument11 pagesText2 - Human - Communication - in - A - Digital - Age - Per PDFAna LianaNo ratings yet
- Exp - No.3 - Thevenins Theorem and Maximum Power Transfer TheoremDocument4 pagesExp - No.3 - Thevenins Theorem and Maximum Power Transfer Theoremforest lifeNo ratings yet
- Data Sheet Compact SwitchesDocument17 pagesData Sheet Compact SwitchesSufyan KazimNo ratings yet
- Amrutvahini College of Engineering, Sangamner: Department of Computer Engineering 2021-2022 A Project Presentation OnDocument24 pagesAmrutvahini College of Engineering, Sangamner: Department of Computer Engineering 2021-2022 A Project Presentation OnprajaNo ratings yet
- 8 Ways Digital Teachers Prepare Students for Global EconomyDocument11 pages8 Ways Digital Teachers Prepare Students for Global EconomyAna Marie TagayunNo ratings yet
- Leave Management SystemDocument47 pagesLeave Management SystemReshma Hedaoo100% (1)
- Vision for Congregational WorshipDocument3 pagesVision for Congregational WorshipAngeloSaul Morales XocaNo ratings yet