You might also like
- Inverting Amplifiers Lab ReportDocument9 pagesInverting Amplifiers Lab ReportRaihan JannatiNo ratings yet
- Modal Analysis of Step-Index FibersDocument25 pagesModal Analysis of Step-Index Fibersd24testNo ratings yet
- Half Wave Rectifier PDFDocument23 pagesHalf Wave Rectifier PDFArjun SinghNo ratings yet
- 2022-23 Phy Lab Manual Class 12Document32 pages2022-23 Phy Lab Manual Class 12Rasu 789No ratings yet
- Time Constant of RC CircuitDocument13 pagesTime Constant of RC CircuitADRMNo ratings yet
- Op-Amp Differentiator Circuit ExperimentDocument2 pagesOp-Amp Differentiator Circuit ExperimentBhadresh Renuka100% (1)
- Presentation On A Variable Audio Frequency Oscillator Using Op-Amp 741Document13 pagesPresentation On A Variable Audio Frequency Oscillator Using Op-Amp 741Moriyom MouNo ratings yet
- RC Time ConstantDocument2 pagesRC Time ConstantJunaid AhmadNo ratings yet
- Parity Generator Checker PDFDocument3 pagesParity Generator Checker PDFSujesh P Lal67% (3)
- Full Wave Bridge Rectifier Explained in 40 CharactersDocument4 pagesFull Wave Bridge Rectifier Explained in 40 CharactersSachit KumarNo ratings yet
- Psim Interface Opal RTDocument33 pagesPsim Interface Opal RTtvs_krishnavarmaNo ratings yet
- 1.RC CircuitsDocument7 pages1.RC CircuitsNaveen ChNo ratings yet
- Experiment Name-Study of Wein Bridge OscillatorDocument2 pagesExperiment Name-Study of Wein Bridge Oscillatormrana_56No ratings yet
- Oscillator PDFDocument4 pagesOscillator PDFJoshua DuffyNo ratings yet
- LIC Manual NewDocument84 pagesLIC Manual NewVandhana PramodhanNo ratings yet
- Anderson Bridge: User ManualDocument12 pagesAnderson Bridge: User Manualaa_nilawarNo ratings yet
- Wien Bridge Oscillator Using OpampDocument4 pagesWien Bridge Oscillator Using OpampVishesh Kumar SinghNo ratings yet
- Hopkinson Test On DC Shunt MotorDocument5 pagesHopkinson Test On DC Shunt MotorVarun VadluriNo ratings yet
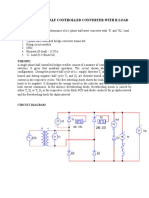
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- Moving Coil GalvanometerDocument2 pagesMoving Coil GalvanometerKashish PandeyNo ratings yet
- Experiment # 5Document7 pagesExperiment # 5Abdullah TahirNo ratings yet
- Experiment - 05Document17 pagesExperiment - 05Sagar SharmaNo ratings yet
- Applied Electronics Lab 1Document9 pagesApplied Electronics Lab 1Rickel RoweNo ratings yet
- Title: Design of A Flash Analog To Digital ConverterDocument4 pagesTitle: Design of A Flash Analog To Digital Converteranon_776365175No ratings yet
- Zener Diode Guide: Construction, Working & ApplicationsDocument29 pagesZener Diode Guide: Construction, Working & ApplicationsVarsha PrajapatiNo ratings yet
- Precision Rectifier CircuitsDocument13 pagesPrecision Rectifier CircuitsWaqas PervaizNo ratings yet
- Lab1-Introduction To DSO ND FGDocument11 pagesLab1-Introduction To DSO ND FGHamza AliNo ratings yet
- BJT FundamentalsDocument33 pagesBJT FundamentalsMarkNo ratings yet
- Operational Amplifier GuideDocument56 pagesOperational Amplifier GuideVedang PavanjeNo ratings yet
- Galvanometer To VoltmeterDocument2 pagesGalvanometer To Voltmeterfaizmustafa67No ratings yet
- BJTDocument6 pagesBJTengineerluvNo ratings yet
- Common Emitter Transistor CharacteristicsDocument6 pagesCommon Emitter Transistor CharacteristicsShiv Mangal Singh Rajawat67% (3)
- Aim: To Test Differentiator and Integrator Circuits Using Ua741op-AmpDocument8 pagesAim: To Test Differentiator and Integrator Circuits Using Ua741op-AmpAvinash Nandakumar100% (1)
- LOGICAL GATES AND PLC LADDER LOGIC (38 CHARACTERSDocument19 pagesLOGICAL GATES AND PLC LADDER LOGIC (38 CHARACTERSSerxhino KorreshiNo ratings yet
- Electri Circuits Lab Manual 1Document11 pagesElectri Circuits Lab Manual 1Sri RoNo ratings yet
- Experiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusDocument6 pagesExperiment:-7 Aim: To Study The Operation of Resistance Firing Circuit Using R, RC & UJT Firing Module. ApparatusNikhil BindalNo ratings yet
- 2 Lecture 2 Diode B Stad - CH - 01Document66 pages2 Lecture 2 Diode B Stad - CH - 01peter brownNo ratings yet
- ADE Lab Manual - Analog Part PDFDocument21 pagesADE Lab Manual - Analog Part PDFJk RinkuNo ratings yet
- Ecet321l - E1 - Single Stage Ce AmplifierDocument9 pagesEcet321l - E1 - Single Stage Ce AmplifierKenneth DomingoNo ratings yet
- Biasing DC and Ac Load LinesDocument15 pagesBiasing DC and Ac Load Linesarjuna4306No ratings yet
- Edc Lab ManualDocument70 pagesEdc Lab ManualreneeshczNo ratings yet
- Design, simulate and implement a 5V DC power supply with filterDocument15 pagesDesign, simulate and implement a 5V DC power supply with filterHARSHIL HARSHIL GUPTANo ratings yet
- Single-Phase System (Resistive Load)Document20 pagesSingle-Phase System (Resistive Load)lalitbickNo ratings yet
- Dual Input Differential Amplifier GuideDocument5 pagesDual Input Differential Amplifier GuidePrempal TomarNo ratings yet
- Astable Multivibrators Using 555 ICDocument6 pagesAstable Multivibrators Using 555 ICJaimin ShahNo ratings yet
- Project Report Class 12 On TRANSFORMERDocument23 pagesProject Report Class 12 On TRANSFORMERArnav TiwariNo ratings yet
- Half Wave Rectification Experiment - 3: TheoryDocument10 pagesHalf Wave Rectification Experiment - 3: TheoryLakshayNo ratings yet
- A Balanced Star Connected Load Takes 90 A From A Balanced 3-Phase, 4-Wire Supply. If The Fuses in The Y and B Phases Are Removed, Find The Symmetrical Components of The Line CurrentsDocument1 pageA Balanced Star Connected Load Takes 90 A From A Balanced 3-Phase, 4-Wire Supply. If The Fuses in The Y and B Phases Are Removed, Find The Symmetrical Components of The Line CurrentsممشطNo ratings yet
- Intro Op AmpDocument44 pagesIntro Op AmpNimish PrabhakarNo ratings yet
- Refresher Course: Experimental PhysicsDocument15 pagesRefresher Course: Experimental PhysicsNeelam KapoorNo ratings yet
- Potentiometer Error Detector CharacteristicsDocument16 pagesPotentiometer Error Detector CharacteristicsAryan Batra100% (1)
- Voltage Regulation of 3-Phase Alternator by ZPF and ASA MethodsDocument6 pagesVoltage Regulation of 3-Phase Alternator by ZPF and ASA Methods61EEPrabhat PalNo ratings yet
- First Order Active Filters (LPF, HPF) : (A) Low Pass FilterDocument12 pagesFirst Order Active Filters (LPF, HPF) : (A) Low Pass FilterVRNo ratings yet
- Experiment 1-3Document6 pagesExperiment 1-3Mitrayosna MishraNo ratings yet
- LCR MeterDocument6 pagesLCR MeterUmair GulNo ratings yet
- Capacitance and Van de Graaff Generator: Created by C. Mani, Principal, K V No.1, AFS, Jalahalli West, BangaloreDocument45 pagesCapacitance and Van de Graaff Generator: Created by C. Mani, Principal, K V No.1, AFS, Jalahalli West, BangaloreLikith Sai JonnaNo ratings yet
- Transistor Current ComponentsDocument3 pagesTransistor Current ComponentsDiptendu MitraNo ratings yet
- Expt No. 03 - To Design and Test Op Amp Integrator For Given FrequenciesDocument7 pagesExpt No. 03 - To Design and Test Op Amp Integrator For Given FrequenciesPrakash Narkhede100% (1)
- 6 Log Anti Log AmplifiersDocument32 pages6 Log Anti Log AmplifiersAnonymous eWMnRr70q0% (1)
- AS3842Document10 pagesAS3842kik020No ratings yet
- QB U6ecb18Document20 pagesQB U6ecb18Vinoth KumarNo ratings yet
- Data Communication and Computer Networks Course OverviewDocument2 pagesData Communication and Computer Networks Course OverviewVinoth KumarNo ratings yet
- U6csa18 Data Communication and Computer Networksl T P C3 0 0 3Document2 pagesU6csa18 Data Communication and Computer Networksl T P C3 0 0 3Vinoth KumarNo ratings yet
- A. Mathematics - of - Binary MorphologyDocument209 pagesA. Mathematics - of - Binary MorphologyVinoth Kumar100% (1)
- BobDocument1 pageBobVinoth KumarNo ratings yet
- Ica Lab Manual 151003 PDFDocument40 pagesIca Lab Manual 151003 PDFVinoth KumarNo ratings yet
- Valores Comerciales de RESISTENCIAS & CONDENSADORESDocument1 pageValores Comerciales de RESISTENCIAS & CONDENSADORESOmarbin BrachoNo ratings yet
- Bell PDFDocument8 pagesBell PDFlibraryNo ratings yet
- PRO5150 Detallado #1Document102 pagesPRO5150 Detallado #1Julio Saravia RojasNo ratings yet
- Fm357 eDocument485 pagesFm357 eRafaelNo ratings yet
- Bicycle Power Generator Design for Off-Grid EnergyDocument52 pagesBicycle Power Generator Design for Off-Grid EnergyDeepjyoti Talukdar100% (2)
- Ablerex MSII and MSII RT User ManualDocument24 pagesAblerex MSII and MSII RT User ManualRosiinNo ratings yet
- Optimum Frame SynchronizationDocument5 pagesOptimum Frame SynchronizationDawit SeleshNo ratings yet
- SH 4007 AiDocument398 pagesSH 4007 AiThanh Nguyễn ĐứcNo ratings yet
- DC Motors PDFDocument30 pagesDC Motors PDFMADHUSUDHAN BOYANo ratings yet
- 6578 ProtectionSystem MT 20121022Document12 pages6578 ProtectionSystem MT 20121022thyago_hcNo ratings yet
- Iec 77a-532-Np (2006) PDFDocument6 pagesIec 77a-532-Np (2006) PDFJulián C. PachónNo ratings yet
- Technical Data Mq-7 Gas Sensor: FeaturesDocument3 pagesTechnical Data Mq-7 Gas Sensor: FeaturesFarshad yazdiNo ratings yet
- Beckhoff Main Catalog 2019 Volume2 PDFDocument728 pagesBeckhoff Main Catalog 2019 Volume2 PDFAlexandru DiaconescuNo ratings yet
- Polimobil PlusDocument8 pagesPolimobil Plusrossi100% (1)
- Schematic Diagram DVD-P370Document8 pagesSchematic Diagram DVD-P370Alexandre S. Corrêa0% (1)
- XP-K7VM333 1002Document22 pagesXP-K7VM333 1002Claudio RomNo ratings yet
- Assignment I-Grade 10 AdvancedDocument2 pagesAssignment I-Grade 10 Advancedmaryam abdullahNo ratings yet
- Cim 300 - Bacnet MS-TPDocument2 pagesCim 300 - Bacnet MS-TPBalasundaramSrinivasaRajkumarNo ratings yet
- XLS140-2 DatasheetDocument8 pagesXLS140-2 DatasheetAdriana UstarizNo ratings yet
- HP Compaq d530 Series Personal Computer: Should Be Construed As Constituting An Additional WarrantyDocument2 pagesHP Compaq d530 Series Personal Computer: Should Be Construed As Constituting An Additional WarrantyAlexandro HotnandoNo ratings yet
- Fundamentals of Flow Computers White PaperDocument12 pagesFundamentals of Flow Computers White PaperDave NakpodiaNo ratings yet
- 1.1. 2 Ficha Tecnica Cabina de Mando M-1373CDocument4 pages1.1. 2 Ficha Tecnica Cabina de Mando M-1373CEdison David Roberto OrtizNo ratings yet
- Growatt ManualDocument28 pagesGrowatt ManualDenis Carneiro SantosNo ratings yet
- CPU fan controller project uses PSOC for temperature-based speed controlDocument4 pagesCPU fan controller project uses PSOC for temperature-based speed controlmantoruleNo ratings yet
- Lab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitDocument81 pagesLab 1: Study of Gates & Flip-Flops: - Digital IC Trainer KitforghanNo ratings yet
- Ebara Variable Speed Booster SystemDocument27 pagesEbara Variable Speed Booster SystemnettomdNo ratings yet
- Microprocessor 8085Document25 pagesMicroprocessor 8085hetal_limbaniNo ratings yet
- Electrical Systems: Scope of WorksDocument4 pagesElectrical Systems: Scope of WorksSaso SaberNo ratings yet
- S. P. Bali - Electrical Technology Machines & Measurement Vol 2-Pearson Education (2013) PDFDocument451 pagesS. P. Bali - Electrical Technology Machines & Measurement Vol 2-Pearson Education (2013) PDFRaghul R100% (2)
- InverterDocument52 pagesInverterD'ivy M Chico100% (3)
- RP 08 - Measuring EMF of An Electrochemical CellDocument4 pagesRP 08 - Measuring EMF of An Electrochemical CellASLAM HANIEFNo ratings yet