You might also like
- Recent Advances in Underwater Acoustic Communications & NetworkingDocument10 pagesRecent Advances in Underwater Acoustic Communications & NetworkingbarshiniNo ratings yet
- Fig. 1: Shallow Water Multipath Propagation: in Addition To The Direct Path, The Signal Propagates ViaDocument8 pagesFig. 1: Shallow Water Multipath Propagation: in Addition To The Direct Path, The Signal Propagates Viaroshan5457No ratings yet
- 04-3 SDRT A Reliable Data Transport Protocol For Underwater Sensor Networks (2010)Document15 pages04-3 SDRT A Reliable Data Transport Protocol For Underwater Sensor Networks (2010)piranhapressNo ratings yet
- Seminar Underwater WirelessDocument21 pagesSeminar Underwater Wirelesszdurga80% (5)
- Cdgi'S Chameli Devi School of Engineering, Indore: Underwater CommunicationDocument27 pagesCdgi'S Chameli Devi School of Engineering, Indore: Underwater CommunicationNishant DeoNo ratings yet
- Amit ThesisDocument19 pagesAmit ThesisSiju ThomasNo ratings yet
- Underwater Optical Wireless CommunicationDocument30 pagesUnderwater Optical Wireless CommunicationPhuc HoangNo ratings yet
- 8 Research ProposalDocument10 pages8 Research ProposalMohammad ArifNo ratings yet
- Underwater Wireless 07012013125531 Underwater WirelessDocument15 pagesUnderwater Wireless 07012013125531 Underwater Wirelessmahendrarm2112No ratings yet
- Seminar Report Akhil 25 10 2013Document25 pagesSeminar Report Akhil 25 10 2013mailtoakhilsNo ratings yet
- Hydrophones Propagation Signal Attenuation Acoustic Waves Electromagnetic WavesDocument8 pagesHydrophones Propagation Signal Attenuation Acoustic Waves Electromagnetic WavesPrakash VNo ratings yet
- Proposal ThesisDocument15 pagesProposal ThesisYosef KirosNo ratings yet
- Seminar On Underwater Wireless CommunicationDocument21 pagesSeminar On Underwater Wireless CommunicationENG18EC0062-MD TANVEERNo ratings yet
- Marggaret SutherDocument15 pagesMarggaret SuthervgopikNo ratings yet
- Analysis On The Effect of Salinity in Underwater Wireless Optical CommunicationDocument12 pagesAnalysis On The Effect of Salinity in Underwater Wireless Optical CommunicationRounaque azamNo ratings yet
- Underwater Wireless Sensor Networks A Survey On Enabling Technologies Localization Protocols and Internet of Underwater ThingsDocument21 pagesUnderwater Wireless Sensor Networks A Survey On Enabling Technologies Localization Protocols and Internet of Underwater Thingssuguna sugunaNo ratings yet
- Sensors: HAS: A Heuristic Adaptive Sink Sensor Set Selection For Underwater AUV-Aid Data Gathering AlgorithmDocument17 pagesSensors: HAS: A Heuristic Adaptive Sink Sensor Set Selection For Underwater AUV-Aid Data Gathering AlgorithmMurtaza RizviNo ratings yet
- Underwater Wireless CommunicationDocument9 pagesUnderwater Wireless CommunicationsayaleeNo ratings yet
- Sensors: Underwater Electromagnetic Sensor Networks-Part I: Link CharacterizationDocument16 pagesSensors: Underwater Electromagnetic Sensor Networks-Part I: Link CharacterizationNeil OpenaNo ratings yet
- NOMA Based Cooperative Relaying Strategy For Underwater Acoustic Sensor Networks Under Imperfect SIC and Imperfect CSI: A Comprehensive AnalysisDocument16 pagesNOMA Based Cooperative Relaying Strategy For Underwater Acoustic Sensor Networks Under Imperfect SIC and Imperfect CSI: A Comprehensive AnalysisProjects MNo ratings yet
- Underwater Electromagnetic PropagationDocument5 pagesUnderwater Electromagnetic PropagationebystewartNo ratings yet
- Underwater CommunicationDocument5 pagesUnderwater CommunicationBinoy VargheseNo ratings yet
- A Survey of Routing Protocols For Underwater Wireless Sensor NetworksDocument24 pagesA Survey of Routing Protocols For Underwater Wireless Sensor NetworksGJ GNANA VENKAT NAGNo ratings yet
- An Energy and Spectral Efficient in Underwater Communication Using Magneto Inductive ChannelDocument7 pagesAn Energy and Spectral Efficient in Underwater Communication Using Magneto Inductive ChannelIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Shallow Water Acoustic Networks Full ReportDocument26 pagesShallow Water Acoustic Networks Full ReportSimmi JoshiNo ratings yet
- Nama: Yuandhika Adhi Widhyatmaka Judul: Implementation of Ofdm Acoustic Modems ON TMS320C6416 SUPERVISOR: Dr. Ir. Wirawan, DEA. Dr. Ir. Suwadi, MTDocument2 pagesNama: Yuandhika Adhi Widhyatmaka Judul: Implementation of Ofdm Acoustic Modems ON TMS320C6416 SUPERVISOR: Dr. Ir. Wirawan, DEA. Dr. Ir. Suwadi, MTYuan DhikaNo ratings yet
- 128 CollisionDocument9 pages128 CollisionNithyaNo ratings yet
- Undersea Wireless Sensor Network For Ocean Pollution PreventionDocument8 pagesUndersea Wireless Sensor Network For Ocean Pollution PreventionAdekunle GbadeboNo ratings yet
- Underwater Wireless CommunicationDocument18 pagesUnderwater Wireless CommunicationNeelasha Baa100% (1)
- UWVCDocument22 pagesUWVCYoudhishter RajNo ratings yet
- Aquatic ApplicationsDocument8 pagesAquatic ApplicationsGautam DemattiNo ratings yet
- Underwater Acoustic Simulation and Modeling Using MATLABDocument3 pagesUnderwater Acoustic Simulation and Modeling Using MATLABDeepika ChoudharyNo ratings yet
- Underwater Wireless Optical Communication Using Directly ModulatedDocument6 pagesUnderwater Wireless Optical Communication Using Directly ModulatedDarso GamboaNo ratings yet
- Ijcet: International Journal of Computer Engineering & Technology (Ijcet)Document8 pagesIjcet: International Journal of Computer Engineering & Technology (Ijcet)IAEME PublicationNo ratings yet
- Underwater Wireless CommunicationDocument16 pagesUnderwater Wireless CommunicationgovindNo ratings yet
- Zaidi 2013Document6 pagesZaidi 2013isaanisaanNo ratings yet
- Aquatic ApplicationsDocument8 pagesAquatic ApplicationsvineetpaladiNo ratings yet
- UWVCDocument22 pagesUWVCsfdgfNo ratings yet
- Alemyene P1038-1046 PDFDocument9 pagesAlemyene P1038-1046 PDFyemer AyanawNo ratings yet
- Case StudyDocument9 pagesCase Studyrushi1990No ratings yet
- Underwater Wireless CommunicationDocument16 pagesUnderwater Wireless CommunicationvamsiNo ratings yet
- Underwater Wireless Sensor Networks: Applications, Challenges and Design Issues of The Network LayerDocument7 pagesUnderwater Wireless Sensor Networks: Applications, Challenges and Design Issues of The Network LayerWARSE JournalsNo ratings yet
- 2637 Pid1985185Document9 pages2637 Pid1985185eNo ratings yet
- Tang 2020 J. Phys. Conf. Ser. 1617 012036Document7 pagesTang 2020 J. Phys. Conf. Ser. 1617 012036mubeen javedNo ratings yet
- Underwater Wireless CommunicationDocument16 pagesUnderwater Wireless CommunicationAchyuth JanaNo ratings yet
- Topic Name: Aqua Communication Using Modem: Seminar Examination Department of Mechanical Enginnering (AY-2021-22)Document12 pagesTopic Name: Aqua Communication Using Modem: Seminar Examination Department of Mechanical Enginnering (AY-2021-22)Durgesh ShindeNo ratings yet
- Time Synchronization For High Latency Acoustic Networks - Extended Technical ReportDocument14 pagesTime Synchronization For High Latency Acoustic Networks - Extended Technical Reportjumov1No ratings yet
- An Overview of Underwater Acoustic Communication VDocument6 pagesAn Overview of Underwater Acoustic Communication VDeepak Singh YadavNo ratings yet
- Concept Design of Satellite Communications System For Next Generation Marine Observation - Broadband IP Network Down To UnderwaterDocument7 pagesConcept Design of Satellite Communications System For Next Generation Marine Observation - Broadband IP Network Down To UnderwaterRaj KannanNo ratings yet
- Multi-Path Division Transmission For Improving Reliability and Energy E Ciency in Underwater Acoustic NetworksDocument10 pagesMulti-Path Division Transmission For Improving Reliability and Energy E Ciency in Underwater Acoustic NetworkslazzycatNo ratings yet
- Radar SpectrumDocument18 pagesRadar SpectrumSry SantosNo ratings yet
- Buoy DesignDocument97 pagesBuoy DesignHollanda CocobearNo ratings yet
- A Brief History of Free Space Optical CommunicationsDocument24 pagesA Brief History of Free Space Optical Communicationsvinaypratsingh0% (1)
- Mitrut Caraivan Et Al Multi-Purpose Underwater Data Collection SensorsDocument5 pagesMitrut Caraivan Et Al Multi-Purpose Underwater Data Collection SensorsmccatysNo ratings yet
- Hybrid Acoustic/Optic Communications in Underwater SwarmsDocument9 pagesHybrid Acoustic/Optic Communications in Underwater Swarms283472 ktr.phd.ece.19No ratings yet
- Underwater Communications in Wireless Sensor Networks Using Wlan at 2.4 GHZDocument6 pagesUnderwater Communications in Wireless Sensor Networks Using Wlan at 2.4 GHZgomu85No ratings yet
- Ak YildizDocument6 pagesAk YildizMadhusudanan AshokNo ratings yet
- Thesis Topics On Microwave CommunicationDocument8 pagesThesis Topics On Microwave Communicationmichellesinghseattle100% (2)
- 1i308a 1i308b 1i308v 1i308g 1i308d 1i308e 1i308zh 1i308i 1i308kDocument1 page1i308a 1i308b 1i308v 1i308g 1i308d 1i308e 1i308zh 1i308i 1i308kThanhha NguyenNo ratings yet
- Programming A Cypress PSoC Using PSoC DesignerDocument12 pagesProgramming A Cypress PSoC Using PSoC DesignerThanhha NguyenNo ratings yet
- 13 Commsys Rev5 Lab5Document22 pages13 Commsys Rev5 Lab5Thanhha NguyenNo ratings yet
- Analog Filters Using MATLABDocument14 pagesAnalog Filters Using MATLABThanhha NguyenNo ratings yet
- Microwaves101 - Spectrum AnalyzerDocument9 pagesMicrowaves101 - Spectrum AnalyzerThanhha NguyenNo ratings yet
- Sga 6589Document4 pagesSga 6589Thanhha NguyenNo ratings yet
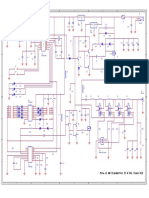
- Схема Блока Питания ТрансивераDocument17 pagesСхема Блока Питания ТрансивераThanhha NguyenNo ratings yet
- Gain Characterization of The RF Measurement Path: J. Wayde AllenDocument20 pagesGain Characterization of The RF Measurement Path: J. Wayde AllenThanhha NguyenNo ratings yet
- H 11 Aa 1Document7 pagesH 11 Aa 1Josetheking CrackedsoftwaresNo ratings yet
- 0632 Hf/uhf Field Radio EquipmentDocument166 pages0632 Hf/uhf Field Radio EquipmentRamon C. Pastores100% (2)
- V An Innovative Magnetic Field Sweep Unit: of of of ofDocument20 pagesV An Innovative Magnetic Field Sweep Unit: of of of ofBerthaFloresNo ratings yet
- 307RF Rudra38Document6 pages307RF Rudra38Thanhha NguyenNo ratings yet
- My C NotesDocument30 pagesMy C NotesBrijendra Mohan GuptaNo ratings yet
- Scanner: Monitor. Protect. Control. Visualize. CommunicateDocument2 pagesScanner: Monitor. Protect. Control. Visualize. CommunicateThanhha NguyenNo ratings yet
- FM Digital Tuner FM 数字调谐器Document4 pagesFM Digital Tuner FM 数字调谐器Thanhha NguyenNo ratings yet
- Pira - CZ AM Transmitter 25 W PLL Class D/E: VIN VoutDocument1 pagePira - CZ AM Transmitter 25 W PLL Class D/E: VIN VoutThanhha NguyenNo ratings yet
- Koch 2016Document331 pagesKoch 2016Thanhha NguyenNo ratings yet
- Us 7088830Document9 pagesUs 7088830Thanhha NguyenNo ratings yet
- Osciladores Simplificados Con Proyectos by EnigmaelectronicaDocument261 pagesOsciladores Simplificados Con Proyectos by EnigmaelectronicaCarlos RamirezNo ratings yet
- Wireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded LabDocument12 pagesWireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded Labmoonaliawan100% (3)
- Serial DDS Controller: Dave Ek, NK0E George Heron, N2APBDocument1 pageSerial DDS Controller: Dave Ek, NK0E George Heron, N2APBThanhha Nguyen100% (1)
- 7 PLL Synthesizer 4 55Document55 pages7 PLL Synthesizer 4 55Thanhha NguyenNo ratings yet
- ME1010 RF Circuit Design (Agilent Genesys) Lab 7 RF Oscillator DesignDocument14 pagesME1010 RF Circuit Design (Agilent Genesys) Lab 7 RF Oscillator DesignThanhha NguyenNo ratings yet
- Wireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded LabDocument12 pagesWireless Data Transmission Between Two PIC Microcontrollers Using Low-Cost RF Modules - Embedded Labmoonaliawan100% (3)
- 7 PLL Synthesizer 4 55Document55 pages7 PLL Synthesizer 4 55Thanhha NguyenNo ratings yet
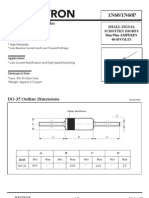
- Schottky Barrier Diodes: Lead (PB) - FreeDocument2 pagesSchottky Barrier Diodes: Lead (PB) - FreeDario G. MartinezNo ratings yet
- 93071ADocument10 pages93071AThanhha NguyenNo ratings yet
- FM Digital Tuner FM 数字调谐器Document4 pagesFM Digital Tuner FM 数字调谐器Thanhha NguyenNo ratings yet
- ME1010 RF Circuit Design (Agilent Genesys) Lab 7 RF Oscillator DesignDocument14 pagesME1010 RF Circuit Design (Agilent Genesys) Lab 7 RF Oscillator DesignThanhha NguyenNo ratings yet
- Bai BaoDocument1 pageBai BaoThanhha NguyenNo ratings yet
- Collision PHET LabDocument4 pagesCollision PHET LabBahril IlmiwanNo ratings yet
- Marking Criteria For Paper 2 (PMR)Document7 pagesMarking Criteria For Paper 2 (PMR)nitamansNo ratings yet
- LAMP StackDocument10 pagesLAMP Stackaami6No ratings yet
- Lllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLDocument6 pagesLllllllllllllllllillll - L - L - !) !) ) L) (L) !) ) L! (L) LLLLLLLLLLLLLLLLLLLLLLLLLLesssiNo ratings yet
- Resumen CronoamperometríaDocument3 pagesResumen Cronoamperometríabettypaz89No ratings yet
- Condition Surveys and Asset Data Capture - Sample PDFDocument5 pagesCondition Surveys and Asset Data Capture - Sample PDFfghabboonNo ratings yet
- 1970 MarvelDocument2 pages1970 MarvelFjc SuarezNo ratings yet
- Grade 8 Science Unit 1 Force, Motion and EnergyDocument68 pagesGrade 8 Science Unit 1 Force, Motion and EnergyKeil Morada73% (26)
- Work Performance Report in Project ManagementDocument3 pagesWork Performance Report in Project Managementmm.No ratings yet
- Formalization of UML Use Case Diagram-A Z Notation Based ApproachDocument6 pagesFormalization of UML Use Case Diagram-A Z Notation Based ApproachAnonymous PQ4M0ZzG7yNo ratings yet
- South Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisDocument15 pagesSouth Coast LIDAR Project, 2008 - Delivery 1 QC AnalysisariesugmNo ratings yet
- Phase Transformations in Metals and Alloys PDFDocument37 pagesPhase Transformations in Metals and Alloys PDFWillmans Nolberto Ticlla MostaceroNo ratings yet
- Subaltern Voice in The Novel of Anita Nair's Lessons in Forgetting: A Female PerspectiveDocument2 pagesSubaltern Voice in The Novel of Anita Nair's Lessons in Forgetting: A Female PerspectiveIJELS Research JournalNo ratings yet
- The Philosophical Foundations of Educational Research: A Beginner's GuideDocument6 pagesThe Philosophical Foundations of Educational Research: A Beginner's GuideGlorie RoxasNo ratings yet
- KMSC Mystery School of Self Spiritual MasteryDocument7 pagesKMSC Mystery School of Self Spiritual MasteryRalphNo ratings yet
- Manual SIMOTION Rotary Knife V2.0Document140 pagesManual SIMOTION Rotary Knife V2.0Luis Adrian PerezNo ratings yet
- Load Testing Best Practices Using Web LoadDocument39 pagesLoad Testing Best Practices Using Web Loadaustinfru7No ratings yet
- Bit DefenderDocument130 pagesBit Defendermarius_brkt6284No ratings yet
- Ba PDFDocument16 pagesBa PDFTrivium PlaneriumNo ratings yet
- SynopsisDocument25 pagesSynopsisKartik KhannaNo ratings yet
- English 1 - R&J - Character Comparison PaperDocument2 pagesEnglish 1 - R&J - Character Comparison PaperDexter 'Koogi Mane' DaysNo ratings yet
- Dacon Asset Integrity PresentationDocument10 pagesDacon Asset Integrity PresentationMohammed Ilyas Mohiuddin100% (1)
- Enterprise Exam Style QuestionsDocument2 pagesEnterprise Exam Style Questionsapi-301785352No ratings yet
- Chiller MC Quay MacDocument14 pagesChiller MC Quay MacJimmy Franz Caballero ZuñigaNo ratings yet
- Transferring Stock and Sales Data Process SAP StandardDocument3 pagesTransferring Stock and Sales Data Process SAP StandardrksamplaNo ratings yet
- Concepts of Mind: CrystaqueousDocument51 pagesConcepts of Mind: CrystaqueousCasa GrandeNo ratings yet
- End of Semester ReflectionDocument3 pagesEnd of Semester Reflectionapi-242745290No ratings yet
- Marika Rafte Recommendation LetterDocument2 pagesMarika Rafte Recommendation Letterapi-249709155No ratings yet
- Titration Lab ReportDocument4 pagesTitration Lab ReportNot GunnaNo ratings yet
- Method Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Document10 pagesMethod Statement For Surface Preparation and Coating For Pipes Fittings (Perma)Mohamed KhalilNo ratings yet