You might also like
- Practical Radio Frequency Test and Measurement: A Technician's HandbookFrom EverandPractical Radio Frequency Test and Measurement: A Technician's HandbookRating: 5 out of 5 stars5/5 (2)
- Keynote SlidesDocument33 pagesKeynote Slidessliu2002No ratings yet
- Ultrasound Beam Fromation 2009Document13 pagesUltrasound Beam Fromation 2009scuby660No ratings yet
- ECE2005 Probability Theory and Random Processes TH 1 AC39Document2 pagesECE2005 Probability Theory and Random Processes TH 1 AC39Anup PatelNo ratings yet
- CH 1Document33 pagesCH 1Hamze Ordawi1084No ratings yet
- ECE2005 - Probability Theory and Random Processes - 16.12.15 - 10.20PMDocument3 pagesECE2005 - Probability Theory and Random Processes - 16.12.15 - 10.20PMPhillip JebakumarNo ratings yet
- CoatesDocument50 pagesCoateslitoc60255No ratings yet
- Data Acquisition, Representation and Reconstruction: Jian Huang, CS 594, Spring 2002Document71 pagesData Acquisition, Representation and Reconstruction: Jian Huang, CS 594, Spring 2002madhu.nandha9285No ratings yet
- DSP Engineer, Systems Engineer, Wireless Design EngineerDocument3 pagesDSP Engineer, Systems Engineer, Wireless Design Engineerapi-72678201No ratings yet
- Linear & Non-Linear Filtering, Fast Fourier Transformation Theory, State Estimation, Pattern Recognition, Identification TheoryDocument34 pagesLinear & Non-Linear Filtering, Fast Fourier Transformation Theory, State Estimation, Pattern Recognition, Identification TheoryA. Andaya LestariNo ratings yet
- Classification of Hyperspectral ImagesDocument64 pagesClassification of Hyperspectral Imagesuser5 sonkiyaNo ratings yet
- Periods Credits Theory Tutorial Lab Exam Hrs. Sessional Marks Exam Marks Total MarksDocument1 pagePeriods Credits Theory Tutorial Lab Exam Hrs. Sessional Marks Exam Marks Total MarksGunti JaswanthNo ratings yet
- A Phase Measurement Radio Positioning System For Indoor UseDocument66 pagesA Phase Measurement Radio Positioning System For Indoor UsekhansaNo ratings yet
- ELEC 321-001 Signals and Systems: Prof. Kalyana C. Veluvolu IT1-817 Tel: 053-950-7232 E-MailDocument11 pagesELEC 321-001 Signals and Systems: Prof. Kalyana C. Veluvolu IT1-817 Tel: 053-950-7232 E-MailKiran maruNo ratings yet
- Simultaneous Localization and Mapping ! SLAM: York University, Toronto, Ontario June 20, 2005Document12 pagesSimultaneous Localization and Mapping ! SLAM: York University, Toronto, Ontario June 20, 2005wlogwlogNo ratings yet
- Short Survey of Brain Machine Interfaces: Jose C. Principe, PH.DDocument73 pagesShort Survey of Brain Machine Interfaces: Jose C. Principe, PH.Dvahid_019No ratings yet
- Syllabus For ADSPDocument3 pagesSyllabus For ADSPanittadevadasNo ratings yet
- Performance Analysis of Cyclostationary Based Spectrum Sensing For Cognitive RadioDocument31 pagesPerformance Analysis of Cyclostationary Based Spectrum Sensing For Cognitive RadioveerutheprinceNo ratings yet
- E - Candes - Applications and Opportunities of CSDocument85 pagesE - Candes - Applications and Opportunities of CSlogo3141No ratings yet
- RTVue Overview SlidesDocument50 pagesRTVue Overview SlidesSanjay Mukherjee100% (1)
- Wcdma Soft HoDocument28 pagesWcdma Soft HoMostafa GaberNo ratings yet
- Information Fusion For Wireless Sensor Networks: Methods, Models, and ClassificationsDocument26 pagesInformation Fusion For Wireless Sensor Networks: Methods, Models, and ClassificationsBryan NgNo ratings yet
- Mtech Syllabus 4 DSPDocument5 pagesMtech Syllabus 4 DSPvigneshkumarcNo ratings yet
- MRI Tender CNSDocument9 pagesMRI Tender CNSmangofNo ratings yet
- BhgyuiDocument5 pagesBhgyuiRup JoshiNo ratings yet
- Unit - 1.1-14.07.2020-EC8533 - DTSP-Fundamentals of DTSP, Applications, Scope of The Course Etc, Briefed Soft Tools For SimulationDocument8 pagesUnit - 1.1-14.07.2020-EC8533 - DTSP-Fundamentals of DTSP, Applications, Scope of The Course Etc, Briefed Soft Tools For SimulationmakNo ratings yet
- What Is DSP/DTSP? - Converting Analog Into Digital: - Electronically - ComputationallyDocument8 pagesWhat Is DSP/DTSP? - Converting Analog Into Digital: - Electronically - ComputationallymakNo ratings yet
- RashmiDocument31 pagesRashmiNISHANT395No ratings yet
- Noise Supression Techniques For Speech Enhancement Using Adaptive FilteringDocument18 pagesNoise Supression Techniques For Speech Enhancement Using Adaptive FilteringsudarshanNo ratings yet
- TN 320 FinalDocument179 pagesTN 320 FinalAlango Jr TzNo ratings yet
- ELEC301x Review Lecture NotesDocument12 pagesELEC301x Review Lecture NoteserdoganaaaNo ratings yet
- Digital Telecommunications Instructor: MR Nasolwa Edson Room: AB14 (Ground Floor)Document157 pagesDigital Telecommunications Instructor: MR Nasolwa Edson Room: AB14 (Ground Floor)Alango Jr TzNo ratings yet
- Wolpert Slides On Machine LearningDocument107 pagesWolpert Slides On Machine LearningoutlawNo ratings yet
- XsenseDocument47 pagesXsensenanoteraCHNo ratings yet
- Assignment # 01: Digital Signal ProcessingDocument4 pagesAssignment # 01: Digital Signal ProcessingRehanNasirNo ratings yet
- An Improved Space-Time Adaptive Processing (STAP) Model: A Spatiotemporal Approach For fMRIDocument19 pagesAn Improved Space-Time Adaptive Processing (STAP) Model: A Spatiotemporal Approach For fMRIKrishna MeghanaNo ratings yet
- Eee2005 Digital-Signal-Processing Eth 2.0!0!40 Eee 2005 Digital Signal ProcessingDocument3 pagesEee2005 Digital-Signal-Processing Eth 2.0!0!40 Eee 2005 Digital Signal ProcessingAnhileshNo ratings yet
- Massive MIMO Systems: Signal Processing Challenges and Research TrendsDocument25 pagesMassive MIMO Systems: Signal Processing Challenges and Research TrendsGIRISH TSNo ratings yet
- Er. Santosh Kumar Baral Er. Suraj Basant Tulachan: Communications and Knowledge EngineeringDocument13 pagesEr. Santosh Kumar Baral Er. Suraj Basant Tulachan: Communications and Knowledge EngineeringBiplove PokhrelNo ratings yet
- An Introduction To Swarm Robotics - A.martinoli - Tutorial - SlidesDocument97 pagesAn Introduction To Swarm Robotics - A.martinoli - Tutorial - SlidesAnonymous nXvsJHNo ratings yet
- Computer Vision CourseDocument552 pagesComputer Vision Courseamel.tilouche.isetmaNo ratings yet
- Chapter 0Document32 pagesChapter 0KanwalAslamNo ratings yet
- GNSS SignalsDocument72 pagesGNSS SignalsPraveen Chandran C RNo ratings yet
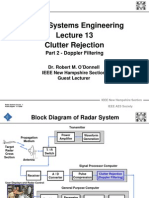
- Radar Clutter Rejection Doppler FilteringDocument67 pagesRadar Clutter Rejection Doppler FilteringneilwuNo ratings yet
- Limitations of Conventional Radiographic Images: Physics Week 2 - Lecture 2Document9 pagesLimitations of Conventional Radiographic Images: Physics Week 2 - Lecture 2nguda002No ratings yet
- 4th Year SyllabusDocument17 pages4th Year Syllabusapi-350836154No ratings yet
- Convention Paper: Audio Engineering SocietyDocument9 pagesConvention Paper: Audio Engineering Societydonald141No ratings yet
- ISRO Electronics SyllabusDocument5 pagesISRO Electronics SyllabusvedasreeNo ratings yet
- BOREE PresentationDocument91 pagesBOREE PresentationSfq QfsNo ratings yet
- Digital Signal Processing: Markus KuhnDocument214 pagesDigital Signal Processing: Markus KuhnKay SmithNo ratings yet
- Scs Mit Feb18Document38 pagesScs Mit Feb18pavan2446No ratings yet
- Digital Signal ProcessingDocument2 pagesDigital Signal ProcessingAnonymous HyOfbJ60% (1)
- RNA-Seq Analysis CourseDocument40 pagesRNA-Seq Analysis Coursejubatus.libroNo ratings yet
- Performance Analysis of Channel Estimation Techniques For IRS Assisted MIMODocument8 pagesPerformance Analysis of Channel Estimation Techniques For IRS Assisted MIMOJohn DoeNo ratings yet
- Introduction & DSP Is Everywhere: Digital Signal ProcessingDocument113 pagesIntroduction & DSP Is Everywhere: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- Elex Sem ViDocument9 pagesElex Sem ViroymjacobNo ratings yet
- On Learning To Identify Genders From Raw Speech Signal Using CnnsDocument5 pagesOn Learning To Identify Genders From Raw Speech Signal Using CnnsharisbinziaNo ratings yet
- 01 Introduction To Feedforward Neural Networks (Hugo)Document78 pages01 Introduction To Feedforward Neural Networks (Hugo)Muhammad RizwanNo ratings yet
- Convolutional Neural Network: From Theory To ImplementationDocument5 pagesConvolutional Neural Network: From Theory To ImplementationMuhammad RizwanNo ratings yet
- 07 Deep Reinforcement Learning (John)Document52 pages07 Deep Reinforcement Learning (John)Muhammad RizwanNo ratings yet
- NMF TutorialDocument189 pagesNMF TutorialMuhammad RizwanNo ratings yet
- Automated Low-Level Analysis and Description of Diverse Intelligence (Aladdin) VideoDocument11 pagesAutomated Low-Level Analysis and Description of Diverse Intelligence (Aladdin) VideoMuhammad RizwanNo ratings yet
- 1 Example 1: This Is The Text in Example OneDocument1 page1 Example 1: This Is The Text in Example OneMuhammad RizwanNo ratings yet
- Bare Demo of Ieeetran - Cls For T M: Ransactions On AgneticsDocument1 pageBare Demo of Ieeetran - Cls For T M: Ransactions On AgneticsMuhammad RizwanNo ratings yet
- Linear Factor Models and Auto-EncodersDocument28 pagesLinear Factor Models and Auto-EncodersMuhammad RizwanNo ratings yet
- Sidebar 1Document4 pagesSidebar 1Muhammad RizwanNo ratings yet
- Example ThesisDocument17 pagesExample ThesisMuhammad RizwanNo ratings yet
- LA Cheat SheetDocument1 pageLA Cheat SheetMuhammad RizwanNo ratings yet
- L TEX 2ε Cheat Sheet: Document classesDocument2 pagesL TEX 2ε Cheat Sheet: Document classesMuhammad RizwanNo ratings yet
- The cornell document class for L TEX 2εDocument20 pagesThe cornell document class for L TEX 2εMuhammad RizwanNo ratings yet
- Thesis PDFDocument25 pagesThesis PDFMuhammad RizwanNo ratings yet
- L Texcheatsheet: 1 What Is L Tex?Document4 pagesL Texcheatsheet: 1 What Is L Tex?Muhammad RizwanNo ratings yet
- Title: Section 3Document1 pageTitle: Section 3Muhammad RizwanNo ratings yet
- Complex Cheat SheetDocument1 pageComplex Cheat SheetMuhammad RizwanNo ratings yet
- English Cheat Sheet 1 (05/10/2015) : Types of Sentences VerbsDocument1 pageEnglish Cheat Sheet 1 (05/10/2015) : Types of Sentences VerbsMuhammad RizwanNo ratings yet
- ODE Cheat SheetDocument2 pagesODE Cheat SheetMuhammad Rizwan88% (8)
- cs312 PDFDocument3 pagescs312 PDFAJAY KUMAR RNo ratings yet
- Deeplearning - Ai Deeplearning - AiDocument42 pagesDeeplearning - Ai Deeplearning - AiPFNo ratings yet
- Cyclic Redundancy CheckDocument9 pagesCyclic Redundancy CheckRakesh InaniNo ratings yet
- Bfs Lemmas & DfsDocument9 pagesBfs Lemmas & Dfsjeanneta oliviaNo ratings yet
- Synthesis-By-Analysis of BCH Codes: October 2012Document6 pagesSynthesis-By-Analysis of BCH Codes: October 2012Febry FundaNo ratings yet
- Eee3100 Bio-Signals-And-Image-Processing LTP 1.0 1 Eee3100Document2 pagesEee3100 Bio-Signals-And-Image-Processing LTP 1.0 1 Eee3100Chandan Kumar ChoubeyNo ratings yet
- Module 2 Linear ProgrammingDocument8 pagesModule 2 Linear Programmingyvonne quiambaoNo ratings yet
- QB - Offline MCQ Exam - Unit - 2 - IcsDocument5 pagesQB - Offline MCQ Exam - Unit - 2 - IcsNisha MateNo ratings yet
- Lempel-Ziv Codes: 5 .1 Lemp El - Ziv P Ar SingDocument12 pagesLempel-Ziv Codes: 5 .1 Lemp El - Ziv P Ar SingPablo MontalvoNo ratings yet
- Signals and Systems Papers Set 1Document4 pagesSignals and Systems Papers Set 1KURRA UPENDRA CHOWDARYNo ratings yet
- Ejercicio 3 PetróleoDocument13 pagesEjercicio 3 PetróleoDiego GarciaNo ratings yet
- Sorting AlgorithmsDocument6 pagesSorting AlgorithmsDN Sea ArjayNo ratings yet
- 2.8 DCT NotesDocument8 pages2.8 DCT NotesAysha ArshaNo ratings yet
- D1T3 - Clarence Chio and Anto Joseph - Practical Machine Learning in InfosecurityDocument33 pagesD1T3 - Clarence Chio and Anto Joseph - Practical Machine Learning in InfosecuritypmjoshirNo ratings yet
- Math and Polotics HW #5Document4 pagesMath and Polotics HW #5julia.moleNo ratings yet
- ADA 2 Mansol ch24 - 367-378Document7 pagesADA 2 Mansol ch24 - 367-378Sabrina DevintasariNo ratings yet
- CH 1Document67 pagesCH 1Hazril MahmudNo ratings yet
- The Tree ADTDocument42 pagesThe Tree ADTnajiullah khanNo ratings yet
- Vectorization of Insertion Sort Using AltivecDocument8 pagesVectorization of Insertion Sort Using Altivecravg10No ratings yet
- Explain With Example That Rate of Convergence of False Position Method Is Faster Than That of The Bisection Method."Document8 pagesExplain With Example That Rate of Convergence of False Position Method Is Faster Than That of The Bisection Method."gauravsanadhya50% (2)
- 21.1.6 Lab - Hashing Things OutDocument3 pages21.1.6 Lab - Hashing Things OutBroe MelloNo ratings yet
- Digital TransmissionDocument17 pagesDigital TransmissionDave MaghinayNo ratings yet
- Lect01 Intro Slides PDFDocument1 pageLect01 Intro Slides PDFrashed44No ratings yet
- IT5409 Ch5 Segmentation v2Document64 pagesIT5409 Ch5 Segmentation v2nguyễn ĐứcNo ratings yet
- Time-Varying Parameter VAR Model Using TVP-VAR Package: Jouchi NakajimaDocument5 pagesTime-Varying Parameter VAR Model Using TVP-VAR Package: Jouchi Nakajimaharip0% (1)
- Corrections To Be Applied To Weighting Factors Due: Appendix BDocument2 pagesCorrections To Be Applied To Weighting Factors Due: Appendix Byaser yaserNo ratings yet
- The Simplex Algorithm and Goal Programming: 4.1 - How To Convert An LP To Standard FormDocument28 pagesThe Simplex Algorithm and Goal Programming: 4.1 - How To Convert An LP To Standard FormTeddy SangaboNo ratings yet
- CNS MCQDocument17 pagesCNS MCQSuvarna Bhoir100% (2)
- Solving Problems by Searching: Chapter 2-3Document55 pagesSolving Problems by Searching: Chapter 2-3Usama ChaudharyNo ratings yet
- S8 - Error DetectionDocument32 pagesS8 - Error Detectionsripallavid1214No ratings yet