International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
SSR Damping Using GCSC and TCSC in Wind Farms
A.B. Mahapatra
Research Scholar, OPJS University,
Churu, Rajasthan, India
Abstract: Wind Power is environmental friendly, emission free green source of energy and presently is growing in the
fastest pace. Recent development concentrates at integrating doubly fed induction generator (DFIG) based wind power
source coupled with capacitive flexible alternating current transmission system (FACTS) controllers suitable for long
distance power transfer. However the extensive use of series capacitive compensators is faced with challenges of
subsynchronous resonance (SSR) phenomenon which leads to turbine generator shaft failure if not prevented. This
paper presents two methods of damping SSR phenomenon using gate controlled series capacitor (GCSC) and thyrister
controlled series capacitor (TCSC)
1. INTRODUCTION:
In the present day world, we need to look at different natural sources of energy available to us. Global warming is the
greatest challenge of the century facing our planet which is directly impacting on worldwide climate change resulting
devastating calamities and posing fundamental threat to all living things on earth. Scientific research has established that
burning of the fossil fuels in power plants to generate electricity has significant influence on global climate changes due
to release of green house gases in to atmosphere. To address the challenge and cause of concern, the attention is rightfully
drawn towards nonpolluting clean energy sources.
Among different available sources of clean energy such as solar power, hydro power, ocean wave power and so on, wind
power has distinct edge over other renewable sources of energy. Wind power plants do not produce atmospheric
emissions that cause acid rain or green house gases and do not pollute the air like Power Plants that rely on combustion of
fossil fuels such as coal or natural gas. In the early development of the wind energy, the majority of the wind turbines
have been operated at constant speed. Subsequently, the number of variable-speed wind turbines installed in wind farms
has increased. Variable speed systems integrated with power electronics interfaces are becoming popular.
Good wind sites are located in remote locations and even some best sites located off shore. Optimizing the transient
stability of remotely located wind firms becomes more so necessary which involves long distance transmission system.
Cost effective technology for long distance transmission from these remote locations to the transmission grid is the need
of the day.
The power transfer ability of the long distance transmission system depends on many factors such as steady state stability
limit, transient stability limit and thermal limit. The transmission losses are required to be minimized and the reliability of
the transmission system to be enhanced. Therefore with increasing demand, it becomes necessary to install Power
electronics capacitive controllers in the power system to improve the transient stability of the transmission system.
Capacitive compensation of DFIG-based wind farm is an economical way to increase the power transfer capability of the
transmission line connecting wind farm to the grid.
However the extensive use of power electronics devices is faced with the challenges of SSR [1], [2],[3]. Turbine
generator shaft failure and electrical instability at oscillation frequencies lower than the normal system frequency result
from SSR. Torsional oscillations of turbine generator shaft system and electrical oscillation with frequency below the sub
synchronous frequency occur due to SSR. To avoid the potential risk of severe damage to the wind farm leading to
turbine generator shaft failure arising out of SSR, it is more so necessary to comprehensively study the SSR damping
phenomenon in wind power transmission system.
The SSR in wind turbine generator systems is a condition where the wind farm exchanges energy with the electric
network, to which it is connected, at one or more natural frequencies of the electric and mechanical part of the combined
system, comprising the wind farm and the network. The frequency of the exchanged energy is below the fundamental
frequency of the system.
Three different types of SSR in DFIG wind farms have been identified in the literature [4], [5]:
Induction Generator Effect (SSIGE)
Torsional Interactions (SSTI)
Control
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -138
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
2. MODELING OF DFIG BASED WIND TURBINE
The model of the system includes a wind turbine aerodynamics, a sixth-order induction generator, a second-order twomass shaft system; a fourth-order series compensated transmission line, an eighth-order rotor-side converter (RSC) and
grid-side converter (GSC) controllers, and a first-order DC-link model.
2.1 POWER SYSTEM DESCRIPTION
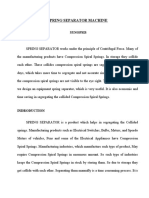
Figure 2.1: One line diagram of the studied power system. RL = transmission line resistance, XL = transmission line
reactance, XT = transformer reactance, Xsys = system impedance, XC = fixed series capacitor, Xtg = transformer
reactance in grid side converter (GSC), Vs = generators terminal voltage, iL = line current, ig = GSC current, is =
stator current, ir = rotor current [6]
The power system, shown in Figure 2.1, is adapted from the IEEE first benchmark model (FBM) for SSR studies
[3], [6]. In this system, a 100 MW DFIG-based offshore wind farm is connected to the infinite bus via a 161 kV series
compensated transmission line [7]. The 100 MW wind farm is an aggregated model of 50 wind turbine units, where each
unit has a power rating of 2 MW. In fact, a 2 MW wind turbine is scaled up to represent the 100 MW wind farm. This
simplification is supported by several studies [8], [9].
2.2 FUNDAMENTAL CONCEPTS: SMALL SIGNAL STABILITY AND ABC TO QD-FRAME TRANSFORMATION
SMALL-SIGNAL STABILITY
Small-signal stability is the ability of the power system to maintain stability when the system is subjected to small
disturbances [3], [10]. The small-signal stability analysis of a power system can provide power system designers with
valuable information about the inherent small-signal dynamic characteristics of the power system, which will help them
in the design process of the power system. The behavior of any dynamic system, e.g., a power system, can be expressed
by a set of n first order nonlinear ordinary differential equations as follows [10]
x = f (x, u)
(2.1)
Where x = [x1 x2 ...xn] T is called the state vector, and each elements, i.e. xi, are called the state variable. Also, the column
vector u = [u1 u2 ...ur] T is the input to the dynamic system. We might also be interested in the output variables, which can
be expressed in terms of the state and the input variables as follows [10]
y = g(x, u)
(2.2)
Where y = [y1 y2 ...ym] T is the vector of outputs, and g(x, u) is a vector of nonlinear functions that relates the outputs to the
inputs and the state variables
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -139
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
Figure 2.2: Block diagram of the state-space representation.
If the disturbances to the system are considered sufficiently small, one can linearized the differential equations 2.1 and 2.2
around the operating points and can express the system dynamics in state-space form as follows:
x = A x + B u
(2.3)
y = C x + D u
(2.4)
where A is the state matrix of size n n , B is the input matrix of size n r , C is the output matrix of size m n and D is
the feed-forward matrix of size m r. The generic block diagram of the state variables used in this paper is shown in
Figure 2.2.
3. METHODS OF SSR DAMPING IN DFIG BASED WIND FARMS:
The study of SSR damping in DFIG wind farms using two different methods are presented here.The first method, GCSC,
which consists of two anti-parallel gate turn off (GTO) switches connected in parallel with a fixed capacitor for each
phase, is a FACTS device for controlling the power flow in transmission lines [11], [12]. In the GCSC, the gate-turn-off
(GTO) or other gate commutated switches, e.g. gate commutated thyristor (GCT), are used to provide variable impedance
for the transmission lines [13]. Unlike thyristors, which are not fully controllable switches, GTOs can be turned on and
off, making them more controllable switches compared to thyristors [12]. In many situations where a controllable series
compensator must be installed, the GCSC may be used instead of the TCSC, possibly with some advantages.
A comparison of the sizing of the TCSC and the GCSC components, when both the GCSC and the TCSC have the same
maximum capacitive impedance, shows that the power rating of the GCSC capacitor is smaller than that of the TCSC,
especially for power-flow control applications. Moreover, the thyristor valve in the TCSC needs to have a higher current
rating than the gate-commutated switch valve in the GCSC. Finally, the components of a GCSC designed for the same
maximum compensation level of a TCSC may have switches with a smaller rating and, naturally, a reactor is not needed.
For this reason, unlike the TCSC, the GCSC is free of intrinsic internal resonance.
The second method uses thyristor controlled series capacitor (TCSC) for SSR damping. The TCSC, which consists of
thyristor controlled reactor (TCR) in parallel with a fixed capacitor for each phase, is a later member of the first
generation of FACTS devices [12]. This device enables the transmission companies to transfer more power on the
existing transmission lines. For example, ABB manufactured the worlds first TCSC, installed at Kayenta substation,
Arizona in 1992. The TCSC increased the capacity of the transmission line by about 30%. TCSC introduces a number of
important benefits in the application of series compensation like elimination of sub-synchronous resonance (SSR) risks,
damping of active power oscillations, post-contingency stability improvement, and dynamic power flow control [14]. The
TCSC may present the problem of an internal resonance, which must be avoided. This internal resonance also limits
TCSCs operating area [12].
3.1 SSR DAMPING USING G ATE CONTROLLED SERIES CAPACITOR (GCSC)
The GCSC is a new series FACTS device composed of a fixed-capacitor in parallel with a pair of anti-parallel gatecommuted switches. The wind farm is equipped with a GCSC to solve the instability of the wind farm resulting from the
SSR mode, and a SSR damping controller (SSRDC) is designed for this device using residue-based analysis and root
locus diagrams.
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -140
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
Using residue-based analysis, the optimal input control signal (ICS) to the SSRDC is identified that can damp the SSR
mode without destabilizing other modes, and using root-locus analysis, the required gain for the SSRDC is determined.
Matlab/Simulink is used as a tool for modeling and design, and PSCAD/EMTDC is used for time-domain simulations.
Flexible AC transmission systems (FACTS) are defined as a high-power electronic based system and other static
equipment controlling one or several transmission systems to improve their controllability and power transfer capability
[13]. Generally, high-power electronic devices include a variety of diodes, transistors, silicon controlled rectifier (SCR),
and gate-turn-off thyristors (GTO) [15]. Unlike the conventional thyristors or SCRs, GTOs are fully controllable, and
they can be turned on and off by their gate. Nowadays, SCRs and high power GTOs are widely used for FACTS
controllers. Gate-controlled series capacitor (GCSC) is a family of series FACTS devices that uses GTO switches that can
be turned on and off by its gate [13].
Figure 3.1: Single line configuration of the GCSC. vcg = voltage across the GCSC, iL = transmission lines current, icg =
GCSC capacitor current, Xcg = fixed capacitance of the GCSC.
A GCSC (one per phase), as shown in Figure 3.1, is composed of a fixed-capacitor in parallel with a pair of GTOs. The
switch in the GCSC is turned-off at the angle b, measured from the peak value of the line current. Figure 3.2 shows the
line current, capacitor voltage and the GTOs pulses waveform. As seen in this figure, the GTO switch is closed, when vcg
(t) is equal to zero. The effective capacitance of the GCSC is given by [24]:
XG =
(2 sin2 ) =
( sin )
(3.1)
Where is the angle of the advance, is the hold off angle, and XCfg is the fixed capacitance of the GCSC. As changes
from 00 to 1800, XG varies from 0 to Xcg.
Figure 3.2: Line current iL (t), capacitor voltage
vcg (t), and switching function of the GCSC. = GCSCs turn-off angle = the angle of the advance (/2), = hold off
angle (2= 2)
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -141
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
The voltage across the GCSC contains odd harmonics in addition to the fundamental components. The harmonic analysis
of the GCSC and methods to reduce the harmonic levels have already been studied in literature [3] [11], [16], [17]. In
[16], it has been shown that the maximum total harmonic distortion (THD) of the GCSC voltage, when a single GCSC
module is used, is about 4.5%. However, in practice, multi-module GCSCs (MGCSC), which use smaller GCSC modules
in series so that each module compensates part of the total required series compensation level, are used in order to obtain
the required power rating for the GCSC. Using this configuration, the THD generated by the GCSC can be reduced down
to 1.5% [99]. In this method, the voltage of each GCSC module still contains all the harmonic components of the single
GCSC module, but with lower magnitude [11], [16], [17].
The operation of the GCSC is modeled [3] as a variable capacitor. It is assumed that the desired value of the GCSC
reactance is implemented within a well defined time frame, i.e. a delay. The delay can be modeled by a first order lag as
shown in Figure 3.3, which will add one more order to the system. In Figure 3.3, XPSC is determined by the power
scheduling controller (PSC). In [18], [19] a power controller has been used for the GCSC to damp SSR and power
oscillation; however, as shown later, this power controller may not be adequate to damp the SSR. Therefore, an auxiliary
SSRDC, as shown in Figure 4.3 should be added to the GCSC controller to enable it to damp the SSR.
Figure 3.3: Block diagram of the GCSC controller.
Another method for reducing harmonic levels in the GCSC voltage is using multi-pulse arrangements [16]. In this
method, transformers are used to inject the GCSC voltage in to the transmission line, and the transformers windings are
connected in such a way that some lower order harmonics (LOH) of the GCSC voltage are canceled out. Using this
method, the THD of the GCSC voltage could be reduced to less than 0.34%, which is an acceptable Another method for
reducing harmonic levels in the GCSC voltage is using multi-pulse arrangements [16]. In this method, transformers are
used to inject the GCSC voltage in to the transmission line, and the transformers windings are connected in such a way
that some lower order harmonics (LOH) of the GCSC voltage are canceled out. Using this method, the THD of the GCSC
voltage could be reduced to less than 0.34%, which is an acceptable level of THD in high voltage power system and
FACTS applications [16]
The operation of the GCSC is modeled as a variable capacitor. It is assumed that the desired value of the GCSC reactance
is implemented within a well defined time frame, i.e. a delay. The delay can be modeled by a first order lag as shown in
Figure 4.3, which will add one more order to the system. In Figure 3.3, XPSC is determined by the power scheduling
controller (PSC). In [18], [19] a power controller has been used for the GCSC to damp SSR and power oscillation;
however, as shown later, this power controller may not be adequate to damp the SSR. Therefore, an auxiliary SSRDC, as
shown in Figure 4.3 should be added to the GCSC controller to enable it to damp the SSR.
Figure 3.4: Block diagram of the GCSC power scheduling controller (PSC).
`
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -142
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
The block diagram of the GCSCs PSC control is shown in Figure 3.4. In this figure, Tm is the time constant of first order
low pass filter associated with the measurement of the line current. In this controller, the measured line current Im is
compared to a reference current I*L, and the error I is passed through a lead controller and a proportional-integral (PI)
regulator.
Figure 3.5: Real part of Mode 1 and 2 when wind speed is (a) 7 m/s (b) 9 m/s with GCSC and fixed capacitor in line.
A modal analysis at different operating points of the wind farm is performed [3] when the GCSC model with PSC is
added to the system. Figure 3.5 compares the real part of the Mode 1 and 2 at different compensation levels and different
wind speeds for two cases: a) when the DFIG wind farm is compensated only with a series fixed capacitor b) when the
DFIG wind farm is compensated with a GCSC without SSRDC and only with a PSC. As seen in this figure, using only
the PSC in GCSC not only does not enable this device to stabilize the Mode 1, but also it decreases the damping of Mode
1. This shows that an auxiliary SSRDC is needed to enable the GCSC to damp the SSR.
In order to enhance the SSR damping, an auxiliary controller is added to the GCSC control system with an appropriate
input control signal (ICS), as shown in Figure 3.3.The application, modeling, and control of the gate-controlled series
capacitor, a series FACTS device, for transmission line compensation and SSR mitigation in DFIG-based wind farms
using modal analysis was proposed [3]. The residue-based analysis showed that the rotor speed is not an optimum ICS
for the SSRDC for two reasons: first, a very large gain is needed in this case, and second, it is not possible to
simultaneously increase the damping of both SSR and SupSR modes.
Also, even though the residue-based analysis for the line current as ICS predicts that a smaller gain is needed to damp the
SSR mode, the SupSR modes stability is decreased in this case, indicating that this signal may not be an optimum ICS.
The residue-based analysis for the voltage across the GCSC, however, predicts that this signal can increase the stability of
both the SSR ans SupSR modes, simultaneously. The root locus analysis was presented and verified by residue-based
method. As represented in Figure 3.6 for IL as ICS, when the gain increases, the SSR and SupSR modes will move in
opposite direction, as expected from residues analysis. In addition, the maximum damping ratio for SSR mode is obtained
3%, and the corresponding gain in this case is about 0.282, as indicated in Figure 3.6.
Figure 3.6: Root locus diagram of the SSR mode with IL as ICS. The + sign indicates the locations of the roots
corresponding to the indicated gain, Kgc.
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -143
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
For this gain, the corresponding SupSR mode will move toward the right hand side of the root locus diagram, but will not
pass the imaginary axis, and the system is still stable. In addition, using root-locus diagrams, the required gain to damp
the SSR mode was computed for both line current and voltage across the GCSC as ICSs. The results showed that, unlike
the line current as ICS, using voltage across the series capacitor as ICS can guarantee the damping of the SSR modewithout sacrificing the SupSR modes stability. Also, the maximum SSR damping ratio, when the voltage across the
GCSC is used as ICS, is 67% more compared to that of the line current. Time-domain simulation was used to verify the
design process using residue-based analysis and root-locus diagrams.
Figure 3.7: Root locus diagram of the SSR mode with Vcg as ICS. The + sign indicates the locations of the roots
corresponding to the indicated gain, Kgc.
Figure 3.7 represent the root locus diagram of the system when Vcg is as ICS. This figure shows that when the gain
increases, both the SSR and SupSR modes move to the left hand side of the root locus plane. In this case, in order to have
5% damping ratio for SSR mode, the gain is computed 0.598, as indicated in Figure 3.7. For this gain, the corresponding
SupSR mode will move toward the left hand side of the root locus diagram and become more stable.
3.2 SSR DAMPING USING THYRISTOR CONTROLLED SERIES CAPACITOR (TCSC)
In the TCSC, by controlling them firing angle of the thyristors, the parallel LC filter can be tuned, making the impedance
of the TCSC controllable. Figure 3.8 shows the single line configuration of a TCSC which can be applied to each of the
three phases. Figure 3.9 shows typical waveforms of the TCSC including line, capacitor and thyristor currents iL(t) iCT (t)
and iLT (t)), capacitor voltage (vCT ), and corresponding firing pulses T1 and T2. In the TCSC, if the value of the reactor,
XLT, is sufficiently smaller than that of capacitor, XCT, the TCSC can operate in on-off manner so that by changing its
firing angle, , the inductance of the thyristor-controlled reactor (TCR) can be changed. This enables the TCSC to
provide a continuously variable capacitor by canceling part of the XCT impedance using the variable inductor, i.e. TCR
[13]. Typically, the value of XL is chosen to be 10% to 30% of the value of the XCT [13].
Figure 3.8: Typical single line configuration of a TCSC.
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -144
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
Figure 3.9: TCSC capacitor voltage vCT (t), line current iL (t), capacitor and inductor Currents iCT (t) and iLT (t), and
TCSC switching pulses (T1 and T2).
Figure 3.10: TCSC reactance versus firing angle
Figure 3.10 shows typical impedance of the TCSC in terms of firing angle (). As seen in this figure, since the TCSC
actually represents a tunable parallel LC circuit, in a normal TCSC structure, in which the value of XLT is smaller than that
of the capacitor XCT, the TCSC has two operating ranges around its parallel resonance area namely inductive and
capacitive, as shown in Figure 3.10. Care must be taken, in order to avoid the resonance area.
Figure 3.11: Single line diagram of the transmission line and TCSC model.
For the SSR studies, the TCSC is modeled [3] as a variable inductive reactance in parallel with a fixed capacitor, as
shown in Figure 3.11. From this figure, the inductive reactance of the TCSC can be obtained as follows:
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -145
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
(3.2)
where XTCSC () is th desired value of the series comp The basic control structure of the TCSC is shown in Figure 3.12.
The main part of the TCSC control includes power scheduling control (PSC) and SSR damping controller (SSRDC).
Moreover, for the SSR studies, modeling of the gate unit is not required, and it is adequate to assume that the desired
value of the TCSC reactance is provided to the line within a well-defined time frame, which can be modeled by a first
order lag, as seen in Figure 3.12. The value of TTCSC is chosen to be 10 ms. The PSC block diagram is based on a constant
power control, in which the measured line power is compared to a reference real power, which can be derived from the
load flow information. The PSC control is of PI type with dynamic compensation for improving the system response.
Figure 3.12: Block diagram of TCSC control
The control of the TCSC shown in Figure 3.12 also includes a SSRDC. However, the TCSC can damp the SSR even
without a SSRDC. The reason is that as seen in Figure 3.13, where the Bode plot of the TCSC reactance is shown for
XTCSC = 2.2 XTC and compensation level is 60%, the TCSC is capacitive at 60 Hz, but exhibits inductive behavior at the
lower SSR frequencies. This means that for the same compensation level, the FSC may exhibit a resonance at SSR
frequencies, when the FSC capacitive impedance cancels the transmission line inductive impedance, but the TCSC may
not, because the TCSC impedance is inductive at SSR frequencies.
Figure 3.13: Bode plot of the TCSC reactance when XTCSC = = 2.2 XTC .
In the application of the TCSC for SSR damping in DFIG based wind farms was studied [8] and the following
conclusions were drawn:
1. The TCSC is able to damp the SSIGE, even without a SSRDC. However, when using TCSC, the damping ratio of the
SupSR mode decreases compared to FSC.
2. If relatively large values of SSR and SupSR damping ratio are required, a SSRDC must be added to the TCSC
controller.
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -146
International Journal of Innovative Research in Advanced Engineering (IJIRAE) ISSN: 2349-2763
Issue 06, Volume 3 (June 2016)
www.ijirae.com
4. CONCLUSION:
From the above observation, analysis and results it can be concluded that SSR phenomenon can be effectively damped
with properly designed FACTS compensators using GCSC and TCSC and improve the transient stability of the DFIG
based wind farms. In many situations where a controllable series compensator must be installed, the GCSC may be used
instead of the TCSC, possibly with some advantages. A TCSC can damp SSR even without a SSRDC. For the
requirement of large value of SSR and SupSSR damping ratio, a SSRDC must be added to the TCSC controller.
5. REFERENCES:
[1]. H. A. Mohammadpour, A. Ghaderi, E. Santi, Analysis of sub-synchronous resonance in doubly-fed induction
generator-based wind farms interfaced with gate controlled series capacitor , IET Generation, Transmission &
Distribution, DOI: 10.1049/iet-gtd.2013.0643, Available on-line: 16 June 2014.
[2]. H. A. Mohammadpour, Y. J. Shin, E. Santi, SSR analysis of a DFIG-based wind farm interfaced with a gatecontrolled series capacitor, Applied Power Electronics Conference and Exposition (APEC), 2014 Twenty-Ninth
Annual IEEE, pp.3110-3117, March 2014.
[3]. Hossein Ali Mohammadpour Transient stability enhancement of wind firms using power electronics and FACTS
controllers, doctoral dissertation, College of Engineering and Computing, University of South Carolina, 2014.
[4]. K. R. Padiar, Analysis of Sub-synchronous Resonance in Power Systems. Kluwer Academic Publishers (KAP),
Boston, 1999.
[5]. H.A.Mohammadpour, Y. J. Shin, E. Santi,SSR analysis of a DFIG-based wind farm interfaced with a gatecontrolled series capacitor, IEEE Twenty-Ninth Annual Applied Power Electronics Conference and Exposition
(APEC) 2014, pp. 3110 - 3117, 16 20 March, Fort Worth, TX, USA.
[6]. IEEE SSR Task Force, First benchmark model for computer simulation of subsynchronous resonance, IEEE
Trans. Power App. Syst., vol. PAS-96, pp. 1562-1572, Sep./Oct. 1997.
[7]. L. Fan, Z. Miao, Mitigating SSR using DFIG-based wind generation, IEEE Trans.Sustainable Energy, vol. 3, no.
3, pp. 349-358, July 2012
[8]. M. Jafar, M. Molinas, T. Isobe, R. Shimada, Transformer-less series reactive/ harmonic compensation of linecommutated HVDC for offshore wind power integration, Power Delivery, IEEE Transactions on, vol.29, no.1,
pp.353,361, Feb. 2014.
[9]. M. J. Hossain, T. K. Saha, N. Mithulananthan, H. R. Pota, Control strategies for augmenting LVRT capability of
DFIGs in interconnected power systems, IEEE Trans. Industrial Electronics, vol.60, no.6, pp.2510-2522, June
2013.
[10]. P. Kundur, Power System Sability and Control., New York: McGraw Hill, 1994.
[11]. M. Sahni, D. Muthumuni, B. Badrzadeh, A. Gole, A. Kulkarni, Advanced screening techniques for subsynchronous interaction in wind farms, Transmission and Distribution Conference and Exposition (T&D), pp.1-9,
May 2012.
[12]. S. Golshannavaz, M. Mokhtari, D. Nazarpour, SSR suppression via STATCOM in series compensated wind farm
integrations, Electrical Engineering (ICEE), 2011 19th Iranian Conference on, May 2011.
[13]. N. G. Hingorani and L. Gyugi, Understanding FACTS. Piscataway, NJ, 656 USA: IEEE Press, 2000.
[14]. R. K. Varma, Y. Semsedini, S. Auddy, Mitigation of subsynchronous oscillations in a series compensated wind
farm with Thyristor Controlled Series Capacitor (TCSC), Power Systems Conference: Advanced Metering,
Protection, Control, Communication, and Distributed Resources, 2007, pp.331,337, 13-16 March 2007.
[15]. J.M. Carrasco, L.G. Franquelo, J.T. Bialasiewicz, E. Galvan, R.C.P. Guisado, Ma.A.M. Prats, J. I. Leon, N. MorenoAlfonso, Power-electronic systems for the grid integration of renewable energy sources: a survey, IEEE Trans.
Industrial Electronics, vol.53, no.4, pp.11002-1016, June 2006.
[16]. L. F. W. de Souza, E. H. Watanabe, M. Andres GTO controlled ceries capacitors: multi-module and multi-pulse
arrangements, Power Delivery, IEEE Transactions on, vol.15, no.2, pp.725-731, April 2000.
[17]. L. F. W. de Souza, GTO controlled series capacitor, M.Sc. (in Portuguese), COPPE/UFRJ, Rio de Janeiro, Mar.
1998.
[18]. M. Pahlavani, H. A. Mohammadpour, Damping of sub-synchronous resonance and low-frequency power
oscillation in a series-compensated transmission line using gatecontrolled series capacitor, Electric Power Systems
Research, vol. 81, no. 2, pp. 308- 317, Feb. 2011.
[19]. H.A. Mohammadpour, S.M.H. Mirhoseini, A. Shoulaie, Comparative study of proportional and TS fuzzy
controlled GCSC for SSR mitigation, Power Engineering, Energy and Electrical Drives, 2009. POWERENG 09.
International Conference on, pp. 564-569, March 2009.
__________________________________________________________________________________________________
IJIRAE: Impact Factor Value SJIF: Innospace, Morocco (2015): 3.361 | PIF: 2.469 | Jour Info: 4.085 |
Index Copernicus 2014 = 6.57
2014- 16, IJIRAE- All Rights Reserved
Page -147
You might also like
- How To Build Your Own Stun Gun From Schematic DiagramsDocument8 pagesHow To Build Your Own Stun Gun From Schematic Diagramsja632271No ratings yet
- Impact of Excitation System On Power System StabilityDocument39 pagesImpact of Excitation System On Power System StabilityZafar Bajwa100% (4)
- Astm e 426Document4 pagesAstm e 426김경은No ratings yet
- 38apd Aps Service Manual PDFDocument92 pages38apd Aps Service Manual PDFOmar PiñaNo ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- Mitigation of Sub Synchronous Oscillations in ADocument7 pagesMitigation of Sub Synchronous Oscillations in ARamesh GosuNo ratings yet
- Impacts of Wind FarmsDocument20 pagesImpacts of Wind FarmsKVVNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Raport Tehnic Parc FotovoltaicDocument24 pagesRaport Tehnic Parc FotovoltaicPaul GaborNo ratings yet
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocument78 pagesTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNo ratings yet
- Energies 11 02249 v3 PDFDocument33 pagesEnergies 11 02249 v3 PDFSubhadeep PaladhiNo ratings yet
- Modeling of Wind Turbines Based On DFIGDocument8 pagesModeling of Wind Turbines Based On DFIGAida AdylbekovaNo ratings yet
- SVC ModeloDocument4 pagesSVC ModeloLuc JeanNo ratings yet
- 1 s2.0 S1876610213017268 Main PDFDocument10 pages1 s2.0 S1876610213017268 Main PDFMaroju Santosh KiranNo ratings yet
- Impact of Wind Farm On Power Quality Regarding To FACTS DevicesDocument6 pagesImpact of Wind Farm On Power Quality Regarding To FACTS Devicesmekmoh2010No ratings yet
- Virtual Inertia Adaptive Control of A Doubly Fed IDocument16 pagesVirtual Inertia Adaptive Control of A Doubly Fed IMekonnen ShewaregaNo ratings yet
- 154 904 2 PBDocument47 pages154 904 2 PBjagarov4954100% (1)
- Improving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageDocument10 pagesImproving Dynamic Performance of Wind Energy Conversion Systems Using Fuzzy-Based Hysteresis Current-Controlled Superconducting Magnetic Energy StorageNch NMNo ratings yet
- 2013 - The Impact of Wind Farms With Doubly Fed Induction Generators On Power System Electromechanical OscillationsDocument6 pages2013 - The Impact of Wind Farms With Doubly Fed Induction Generators On Power System Electromechanical OscillationsMani AshouriNo ratings yet
- 2 Ares - 1502.00215ggDocument6 pages2 Ares - 1502.00215ggMatheus MaiaNo ratings yet
- elearnica_ir_SSR_damping_in_windDocument10 pageselearnica_ir_SSR_damping_in_windGanesh DuraisamyNo ratings yet
- Micro-Grid Simulation During Grid-Connected and Islanded Modes of OperationDocument6 pagesMicro-Grid Simulation During Grid-Connected and Islanded Modes of OperationNguyễn Đức NguyệnNo ratings yet
- Application of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineDocument7 pagesApplication of STATCOM For Improved Reliability of Power Grid Containing A Wind TurbineWajahat Ullah Khan TareenNo ratings yet
- Electric Power Systems Research: Hossein Ali Mohammadpour, Amin Ghaderi, Hassan Mohammadpour, Enrico SantiDocument3 pagesElectric Power Systems Research: Hossein Ali Mohammadpour, Amin Ghaderi, Hassan Mohammadpour, Enrico SantiNDA BandNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Transient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsDocument18 pagesTransient Analysis of Grid-Connected Wind-Driven PMSG, DFIG and SCIG at Fixed and Variable SpeedsiisteNo ratings yet
- Impact of Wind Farms on Power System Electromechanical OscillationsDocument6 pagesImpact of Wind Farms on Power System Electromechanical OscillationssalmanassriNo ratings yet
- SmoothSmoothing of Wind Farm Output Using Short-Term Ahead Wind Speed Prediction and Flywheel Energy Storage SystemDocument22 pagesSmoothSmoothing of Wind Farm Output Using Short-Term Ahead Wind Speed Prediction and Flywheel Energy Storage SystemAnand Parakkat ParambilNo ratings yet
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document11 pagesIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationNo ratings yet
- 31 808 PDFDocument12 pages31 808 PDFEdamEdamNo ratings yet
- Converter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesDocument5 pagesConverter Protection Scheme For DoublConverter Doubly-Fed Induction Generators During DisturbancesijcsnNo ratings yet
- Control of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridDocument6 pagesControl of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridNam GiangNo ratings yet
- Constant Power Control of Dfig Wind Turbines With Supercapacitor Energy StorageDocument8 pagesConstant Power Control of Dfig Wind Turbines With Supercapacitor Energy StorageInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Limite Reactiva DFIGDocument9 pagesLimite Reactiva DFIGMartin__PringleNo ratings yet
- AGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineDocument7 pagesAGC of A Hydrothermal System With Thyristor Controlled Phase Shifter in The Tie-LineRajeshJosephAbrahamEdasseriathuNo ratings yet
- Assessing Behavior of the Outer Crowbar Protection with the DFIG during Grid FaultsDocument12 pagesAssessing Behavior of the Outer Crowbar Protection with the DFIG during Grid Faults121978ahmedNo ratings yet
- PMSG Wind Energy Conversion Systems ZSIDocument12 pagesPMSG Wind Energy Conversion Systems ZSIIJRASETPublicationsNo ratings yet
- Modeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time SimulationsDocument9 pagesModeling and Control of A Doubly-Fed Induction Generator (DFIG) Wind Power Generation System For Real-Time Simulationsmlsawhney2996No ratings yet
- Fault Analysis of Distribution Network With Wind Turbines of DFIGDocument5 pagesFault Analysis of Distribution Network With Wind Turbines of DFIGalaaa3No ratings yet
- Voltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterDocument8 pagesVoltage Regulation in Hybrid Solar and Wind Energy System Using Sepic ConverterdineshkumarNo ratings yet
- Enhancing power quality and stability in hybrid energy systems using FACTS devicesDocument14 pagesEnhancing power quality and stability in hybrid energy systems using FACTS devicesIulian TraiciuNo ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- IMPROVEMENT OF POWER QUALITY USING STATCOMDocument8 pagesIMPROVEMENT OF POWER QUALITY USING STATCOMRtkNo ratings yet
- Application of STATCOM To Increase Transient Stability of Wind FarmDocument7 pagesApplication of STATCOM To Increase Transient Stability of Wind FarmsirageldeenNo ratings yet
- Transient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropDocument8 pagesTransient Analysis and Modeling of Wind Generator During Power and Grid Voltage DropIAEME PublicationNo ratings yet
- Control of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridDocument6 pagesControl of Permanent-Magnet Generators Applied To Variable-Speed Wind-Energy Systems Connected To The GridJayamohan MNo ratings yet
- Primary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEDocument8 pagesPrimary Frequency Control by Wind Turbines: I. Erlich, Senior Member, IEEE and M. Wilch, Student Member, IEEEМилан ЛукићNo ratings yet
- Operation and Control of Wind Farms in Non-Interconnected Power SystemsDocument38 pagesOperation and Control of Wind Farms in Non-Interconnected Power SystemsYanis MargarisNo ratings yet
- Double Fed Induction Generator (Dfig)Document5 pagesDouble Fed Induction Generator (Dfig)sravanNo ratings yet
- CSE - 27 A1 An Innovative Power System Stabilization Method With Augmented Inertia Synchronous CondensersDocument13 pagesCSE - 27 A1 An Innovative Power System Stabilization Method With Augmented Inertia Synchronous CondensersPower System OperationNo ratings yet
- Research PaperDocument8 pagesResearch PaperkingNo ratings yet
- Performance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerDocument11 pagesPerformance and Analysis of STATCOM For Damping Power System Disturbances Using Fuzzy Logic ControllerBerhanu ZelalemNo ratings yet
- State of The Art of Wind Turbines Modelling With Induction Generator (DFIG)Document8 pagesState of The Art of Wind Turbines Modelling With Induction Generator (DFIG)AJesus PujanteNo ratings yet
- Statcom & DBRDocument18 pagesStatcom & DBRAlok Bikash SadangiNo ratings yet
- Global Wind Power Growth in 2017Document29 pagesGlobal Wind Power Growth in 2017MyrahNo ratings yet
- Raviraju Published PaperDocument10 pagesRaviraju Published Paperraviraju2498No ratings yet
- AbstractDocument3 pagesAbstractsaurabh guptaNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- A1 - Full Papers PS1 10834 2022Document18 pagesA1 - Full Papers PS1 10834 2022DmitryNo ratings yet
- PPT of Sona CLGDocument24 pagesPPT of Sona CLGRam kumarNo ratings yet
- Control of Harmonics and Performance Analysis of A Grid Connected Photovoltaic SystemDocument9 pagesControl of Harmonics and Performance Analysis of A Grid Connected Photovoltaic SystemRanimSaifNo ratings yet
- Control Strategy For HVDC Interconnected DC-based Offshore Wind FarmDocument6 pagesControl Strategy For HVDC Interconnected DC-based Offshore Wind FarmTruong HoaNo ratings yet
- Actual Wind EnergyDocument11 pagesActual Wind EnergyAbhishek V DeshpandeNo ratings yet
- 2nd Reference PaperDocument4 pages2nd Reference PaperTeja BhogadiNo ratings yet
- Enhanced ID3 Algorithm Based On The Weightage of The AttributeDocument7 pagesEnhanced ID3 Algorithm Based On The Weightage of The AttributeIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 04 Fbae10090 PDFDocument8 pages04 Fbae10090 PDFIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Evaluation Mechanism For Similarity-Based Ranked Search Over Scientific DataDocument5 pagesEvaluation Mechanism For Similarity-Based Ranked Search Over Scientific DataIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- An Adaptive Datagathering To Improve The Network Lifetime in Wireless Sensor NetworkDocument6 pagesAn Adaptive Datagathering To Improve The Network Lifetime in Wireless Sensor NetworkIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Error Resiliency For H.264/Advance Video CodecDocument5 pagesError Resiliency For H.264/Advance Video CodecIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Contractual Steps For Smooth Delivery of Infrastructure ProjectsDocument11 pagesContractual Steps For Smooth Delivery of Infrastructure ProjectsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Microstructural and Mechanical Characteristic of Potential Ferro Laterite Soil As Sub-Base MaterialDocument7 pagesMicrostructural and Mechanical Characteristic of Potential Ferro Laterite Soil As Sub-Base MaterialIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Classification of Machine Learning AlgorithmsDocument6 pagesClassification of Machine Learning AlgorithmsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Green Enterprise Computing - Approaches Towards A Greener ITDocument5 pagesGreen Enterprise Computing - Approaches Towards A Greener ITIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Microstructural and Mechanical Characteristic of Potential Ferro Laterite Soil As Sub-Base MaterialDocument7 pagesMicrostructural and Mechanical Characteristic of Potential Ferro Laterite Soil As Sub-Base MaterialIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Concept Design and Analysis of Multipurpose Farm Equipment: M.V.Achutha Sharath Chandra. N Nataraj.G.KDocument7 pagesConcept Design and Analysis of Multipurpose Farm Equipment: M.V.Achutha Sharath Chandra. N Nataraj.G.KIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Influence of Crack Dimensions and Heat Treatment On Fracture Behaviour of AA1050 Alloy Pipes Subjected To Bursting PressuresDocument5 pagesInfluence of Crack Dimensions and Heat Treatment On Fracture Behaviour of AA1050 Alloy Pipes Subjected To Bursting PressuresIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Steady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableDocument5 pagesSteady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 04 Fbae10090 PDFDocument8 pages04 Fbae10090 PDFIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Steady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableDocument5 pagesSteady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Concept Design and Analysis of Multipurpose Farm Equipment: M.V.Achutha Sharath Chandra. N Nataraj.G.KDocument7 pagesConcept Design and Analysis of Multipurpose Farm Equipment: M.V.Achutha Sharath Chandra. N Nataraj.G.KIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Power Quality Improvement Using GUPFCDocument6 pagesPower Quality Improvement Using GUPFCIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Performance Study of Silicone Rubber Polymer Was Filled Fly Ash As Insulator Material On High Voltage Transmission TowerDocument5 pagesPerformance Study of Silicone Rubber Polymer Was Filled Fly Ash As Insulator Material On High Voltage Transmission TowerIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Dynamically Partitioning Big Data Using Virtual MachineDocument4 pagesDynamically Partitioning Big Data Using Virtual MachineIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Study of The Effect of Length and Inclination of Tube Settler On The Effluent QualityDocument5 pagesStudy of The Effect of Length and Inclination of Tube Settler On The Effluent QualityIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Contractual Steps For Smooth Delivery of Infrastructure ProjectsDocument11 pagesContractual Steps For Smooth Delivery of Infrastructure ProjectsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Improving The Performance of Mapping Based On Availability-Alert Algorithm Using Poisson Arrival For Heterogeneous Systems in Multicore SystemsDocument7 pagesImproving The Performance of Mapping Based On Availability-Alert Algorithm Using Poisson Arrival For Heterogeneous Systems in Multicore SystemsIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Approaches and Models of Professional Competence: Definition of Competence in The Training of Engineers in Latin AmericaDocument11 pagesApproaches and Models of Professional Competence: Definition of Competence in The Training of Engineers in Latin AmericaIJIRAE- International Journal of Innovative Research in Advanced Engineering100% (1)
- Studies On Stabilized Mud Block As A Construction MaterialDocument6 pagesStudies On Stabilized Mud Block As A Construction MaterialIJIRAE- International Journal of Innovative Research in Advanced Engineering100% (1)
- Barriers To Implement Lean Principles in The Indian Construction IndustryDocument6 pagesBarriers To Implement Lean Principles in The Indian Construction IndustryIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 18 Dcae10082 PDFDocument6 pages18 Dcae10082 PDFIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 17 Dcae10110 PDFDocument8 pages17 Dcae10110 PDFIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- 15 Dcae10108 PDFDocument10 pages15 Dcae10108 PDFIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- Relevance of Higher Education. How To Measure It? The Case of Masters of Engineering in PeruDocument12 pagesRelevance of Higher Education. How To Measure It? The Case of Masters of Engineering in PeruIJIRAE- International Journal of Innovative Research in Advanced EngineeringNo ratings yet
- ZIEHL ABEGG Flyer ZAsbc4 EnglishDocument5 pagesZIEHL ABEGG Flyer ZAsbc4 EnglishbzivkovicNo ratings yet
- Government Polytechnic Ragkot Project .Document21 pagesGovernment Polytechnic Ragkot Project .Ravi NakumNo ratings yet
- PI Controlled Bi-Directional DC-DC Converter (BDDDC) and Highly Efficient Boost Converter For Electric VehiclesDocument5 pagesPI Controlled Bi-Directional DC-DC Converter (BDDDC) and Highly Efficient Boost Converter For Electric VehiclesOscar Olarte OrtizNo ratings yet
- Ansys Ansoft MaxwellDocument2 pagesAnsys Ansoft MaxwellGustavo Myrria0% (1)
- InstrumentationDocument7 pagesInstrumentationNagaValliNo ratings yet
- Smoke Detectors For Fire Alarm SystemsDocument3 pagesSmoke Detectors For Fire Alarm SystemsDaniel LagosNo ratings yet
- Reversing 3-Phase Induction Motor OperationDocument4 pagesReversing 3-Phase Induction Motor OperationAlfnan AlfnanNo ratings yet
- AD9283 ADC Expansion Module: User GuideDocument8 pagesAD9283 ADC Expansion Module: User GuideNegrea CristianNo ratings yet
- Base Band ELEDocument7 pagesBase Band ELEUmber IsmailNo ratings yet
- W 0700m6 - Gas Mixer PDFDocument5 pagesW 0700m6 - Gas Mixer PDFPopa MihaiNo ratings yet
- EE3010 Electrical Devices and Machines - OBTLDocument6 pagesEE3010 Electrical Devices and Machines - OBTLAaron TanNo ratings yet
- Fuel and Power ElectricityDocument2 pagesFuel and Power ElectricityBøßß PrîñçéNo ratings yet
- Catalogue Onkyo 2014-2015Document10 pagesCatalogue Onkyo 2014-2015Thawatchai PirapongsilNo ratings yet
- MSI Motherboard ManualDocument80 pagesMSI Motherboard ManualHamboneNo ratings yet
- A Practical Introduction To Hardwaresoftware Codesign 1Document64 pagesA Practical Introduction To Hardwaresoftware Codesign 1s_subbulakshmiNo ratings yet
- 667 HB 32750 000Document220 pages667 HB 32750 000MadhuNo ratings yet
- Generator Capability CurveDocument20 pagesGenerator Capability CurvegnathblNo ratings yet
- Formula Notes Network AnalysisDocument9 pagesFormula Notes Network AnalysisSubramanyam Kamatham100% (1)
- Yonah CPU Schematic Block DiagramDocument45 pagesYonah CPU Schematic Block DiagramWilgen GarciaNo ratings yet
- Inverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Document19 pagesInverter 12VDC To 220VAC 100 Watt by Power Transistor 2N3055Bank100% (1)
- Amplifier Audio Transistor Guitar Pre-Amp Circuit Simplest Operating Self BiasDocument2 pagesAmplifier Audio Transistor Guitar Pre-Amp Circuit Simplest Operating Self Biasdreyes2288No ratings yet
- Transmitter Programming Guide Model: APS 95 BT3Document12 pagesTransmitter Programming Guide Model: APS 95 BT3José olivaNo ratings yet
- IG Datasheet PDFDocument2 pagesIG Datasheet PDFHoang GiangNo ratings yet
- Rev SPRING SEPARATORDocument8 pagesRev SPRING SEPARATORAswin MNo ratings yet
- A. O. Ekwue A. O. Ekwue A. O. Ekwue A. O. Ekwue and O. A. Akintunde and O. A. Akintunde and O. A. Akintunde and O. A. AkintundeDocument7 pagesA. O. Ekwue A. O. Ekwue A. O. Ekwue A. O. Ekwue and O. A. Akintunde and O. A. Akintunde and O. A. Akintunde and O. A. AkintundeHARMET UP3 PEMATANGSIANTARNo ratings yet