You might also like
- Electronic Basics #25: Servos and How To Use Them: Servo MotorDocument13 pagesElectronic Basics #25: Servos and How To Use Them: Servo MotorToàn HerreraNo ratings yet
- Arduino Continuous Rotation ServosDocument23 pagesArduino Continuous Rotation Servosmike simsonNo ratings yet
- How To Build An Omni Wheels RobotDocument10 pagesHow To Build An Omni Wheels RobotJonty ChanduNo ratings yet
- Arduino - Stepper MotorDocument3 pagesArduino - Stepper Motorꀸꃅꋪꀎᐯ KumarNo ratings yet
- Automation of Gears in BicycleDocument4 pagesAutomation of Gears in BicycleIJRASETPublicationsNo ratings yet
- Controlling Speed and Direction of A STEPPER Motor With BLYNK and UNO - Projects Made With Blynk - Blynk CommunityDocument2 pagesControlling Speed and Direction of A STEPPER Motor With BLYNK and UNO - Projects Made With Blynk - Blynk CommunityHilman HazmiNo ratings yet
- Computer Controlled Train SetDocument4 pagesComputer Controlled Train SetAnonymous HyOfbJ6No ratings yet
- Two Wheel Self Balancing RobotDocument25 pagesTwo Wheel Self Balancing RobotAnuragNo ratings yet
- Methodology and Design AnalysisDocument15 pagesMethodology and Design AnalysisShivraj ParleNo ratings yet
- LAB 2-AngeladaDocument20 pagesLAB 2-AngeladaAlehamarie AngeladaNo ratings yet
- Research Paper Servo MotorDocument6 pagesResearch Paper Servo Motorc9rz4vrm100% (1)
- Thesis Stepper MotorDocument8 pagesThesis Stepper Motorbsr3rf42100% (1)
- The Servo Motor - IntroductionDocument13 pagesThe Servo Motor - IntroductionbobbyccwNo ratings yet
- Integration With ActuatorsDocument11 pagesIntegration With ActuatorsAlexNo ratings yet
- Project:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaDocument21 pagesProject:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaBabbu MehraNo ratings yet
- Controls Final ReportDocument14 pagesControls Final Reportapi-244906204No ratings yet
- CPE 329 Final Project ReportDocument13 pagesCPE 329 Final Project ReportChris PolisNo ratings yet
- EE448 Lab 2 ReportDocument6 pagesEE448 Lab 2 ReportSai KiranNo ratings yet
- Writing CNC Machine 15ME55PDocument16 pagesWriting CNC Machine 15ME55Parun mNo ratings yet
- Servo Motor Literature ReviewDocument8 pagesServo Motor Literature Reviewc5swkkcn100% (1)
- Control Servo Motor With ArduinoDocument6 pagesControl Servo Motor With ArduinoRahmat PrihartonoNo ratings yet
- DBWS - Controlling DC Motors With The L298N Dual H-Bridge and An Arduino PDFDocument46 pagesDBWS - Controlling DC Motors With The L298N Dual H-Bridge and An Arduino PDFsam etcNo ratings yet
- Controlling of A 360 Degree Rotating Vehicle With Arduino and Bluetooth Module Updated.Document19 pagesControlling of A 360 Degree Rotating Vehicle With Arduino and Bluetooth Module Updated.Aditya ChavanNo ratings yet
- Building A Bicycle Generator PDFDocument5 pagesBuilding A Bicycle Generator PDFryanNo ratings yet
- Bildr Use The Easydriver Stepper Motor Driver..Document5 pagesBildr Use The Easydriver Stepper Motor Driver..fayazrashNo ratings yet
- Arduino Bipolar Stepper Motor Control - Imple ProjectsDocument9 pagesArduino Bipolar Stepper Motor Control - Imple ProjectsSssNo ratings yet
- Servo Motor Control ThesisDocument4 pagesServo Motor Control Thesisjuliemedinaphoenix100% (2)
- Reading Rotary Encoder On Arduino Circuits@HomeDocument17 pagesReading Rotary Encoder On Arduino Circuits@Homesukaryadi1100% (1)
- Two Wheel Self Balancing RobotDocument7 pagesTwo Wheel Self Balancing RobotTuấn AnhNo ratings yet
- Segway Design Meeting #1 Notes - June 16, 2007: Overall Design Goals ("Functional Requirements")Document4 pagesSegway Design Meeting #1 Notes - June 16, 2007: Overall Design Goals ("Functional Requirements")Shreya AgrawalNo ratings yet
- Arduino - Servo MotorDocument3 pagesArduino - Servo Motorꀸꃅꋪꀎᐯ KumarNo ratings yet
- How It Works: How Servo Motors WorkDocument2 pagesHow It Works: How Servo Motors WorkChirkov Kire100% (1)
- 2 Axis Solar TrackerDocument9 pages2 Axis Solar TrackerMauro MarafonNo ratings yet
- Servo Motor 1Document3 pagesServo Motor 1Amin ShaikNo ratings yet
- Bike Generator ThesisDocument6 pagesBike Generator Thesisafhbgrgbi100% (2)
- 28BYJ-48 Stepper Motor With ULN2003 Driver and Arduino UnoDocument6 pages28BYJ-48 Stepper Motor With ULN2003 Driver and Arduino UnoshokaxNo ratings yet
- Application Guide For Pulse and Direction Stepper SystemsDocument14 pagesApplication Guide For Pulse and Direction Stepper Systemsfog900No ratings yet
- ADXL3 XXDocument7 pagesADXL3 XXresolution8878No ratings yet
- Arduino - Modifying A Robot Arm - Lucky LarryDocument25 pagesArduino - Modifying A Robot Arm - Lucky LarryLeonardo Perin VichiNo ratings yet
- How I Hacked The Self Balancing ScooterDocument6 pagesHow I Hacked The Self Balancing ScooterfaizNo ratings yet
- Single-Turn Encoders Vs Multi-Turn Encoders - DynaparDocument4 pagesSingle-Turn Encoders Vs Multi-Turn Encoders - DynaparMozhdeh HeydariNo ratings yet
- 1-Servo Motor Control Using ArduinoDocument12 pages1-Servo Motor Control Using Arduinosebas.lopez1202No ratings yet
- LabReport07 CSDocument5 pagesLabReport07 CSb21215No ratings yet
- Control Systems Project ReportDocument18 pagesControl Systems Project Reportayesha amjad100% (2)
- Parallel Parking RC CarDocument15 pagesParallel Parking RC CarazmyzumaNo ratings yet
- Arduino Line Follower Robot With QRD1114Document20 pagesArduino Line Follower Robot With QRD1114daniel_i_denev100% (1)
- Design and Build A Raspberry Pi Robot: by Stewart Watkiss (Penguintutor)Document71 pagesDesign and Build A Raspberry Pi Robot: by Stewart Watkiss (Penguintutor)Trung KiênNo ratings yet
- Motor SpeedDocument9 pagesMotor Speedbabo25No ratings yet
- SS S S: Teknic System ManualDocument120 pagesSS S S: Teknic System ManualJoseAntonioMolinaVeraNo ratings yet
- Stepper Motor Literature ReviewDocument6 pagesStepper Motor Literature Reviewbeemwvrfg100% (1)
- Seminar ReportDocument12 pagesSeminar ReportArun Arora50% (2)
- Chapter FiveDocument4 pagesChapter FivebezawitNo ratings yet
- Servo ControlDocument12 pagesServo ControlHarry PradoNo ratings yet
- Project 8 Servo MotorsDocument4 pagesProject 8 Servo MotorsDarwin VargasNo ratings yet
- Screw 5Document6 pagesScrew 5Dhana SingarajaNo ratings yet
- PROJECT MOCKINGBIRD v3 - UR65 v1Document35 pagesPROJECT MOCKINGBIRD v3 - UR65 v1michelesmiderleNo ratings yet
- Essential Scooter Maintenance for the Absolute BeginnerFrom EverandEssential Scooter Maintenance for the Absolute BeginnerNo ratings yet
- The Slot Car Handbook: The definitive guide to setting-up and running Scalextric sytle 1/32 scale ready-to-race slot carsFrom EverandThe Slot Car Handbook: The definitive guide to setting-up and running Scalextric sytle 1/32 scale ready-to-race slot carsRating: 3 out of 5 stars3/5 (1)
- DIN Standard SBC Precision Rolled Ball Screw - CatalogueDocument4 pagesDIN Standard SBC Precision Rolled Ball Screw - CatalogueTounsi TwensaNo ratings yet
- Family Tree For Donald Trump SRDocument4 pagesFamily Tree For Donald Trump SRTounsi Twensa100% (1)
- Stepper Motor Control Using Labview TM in A Computer Numerically Controlled Desktop MillDocument25 pagesStepper Motor Control Using Labview TM in A Computer Numerically Controlled Desktop MillTounsi TwensaNo ratings yet
- Solving Contact Problems With AbaqusDocument163 pagesSolving Contact Problems With AbaqusTounsi Twensa100% (1)
- Mo Shar Rafa 1922Document10 pagesMo Shar Rafa 1922Tounsi TwensaNo ratings yet
- Incremental Kinematics For Finite ElementDocument20 pagesIncremental Kinematics For Finite ElementTounsi TwensaNo ratings yet
- Chapter 2 Parametric Analysis in ANSYS Workbench Using ANSYS FLUENTDocument54 pagesChapter 2 Parametric Analysis in ANSYS Workbench Using ANSYS FLUENTmradiliNo ratings yet
- Topology Optimization in ANSYSDocument27 pagesTopology Optimization in ANSYSArkana AllstuffNo ratings yet
- Sandwiches PortfolioDocument6 pagesSandwiches PortfolioMicayy AtibagosNo ratings yet
- Flag Rugby: Student Name: Partner Name: Teacher: E D A ADocument3 pagesFlag Rugby: Student Name: Partner Name: Teacher: E D A AHarpreet Singh JohalNo ratings yet
- Nch-0122.of 1962Document0 pagesNch-0122.of 1962llampechNo ratings yet
- Stations of The Cross - 16th March 2024Document6 pagesStations of The Cross - 16th March 2024markalphonso40261No ratings yet
- Topic 2 Measurement Suspended Floor SlabDocument13 pagesTopic 2 Measurement Suspended Floor SlabAbdul Muhaimin Zainol Abidin88% (8)
- Spare Parts List: Sludge Pumps CP 0077Document16 pagesSpare Parts List: Sludge Pumps CP 0077obumuyaemesiNo ratings yet
- Defensive Depth ChartDocument2 pagesDefensive Depth ChartAnonymous Q0S8eeAxoNo ratings yet
- His Beautiful Haunting EyesDocument113 pagesHis Beautiful Haunting EyesAdelina CîrstianNo ratings yet
- CW Gas Laws ApplicationsDocument2 pagesCW Gas Laws ApplicationsAna roNo ratings yet
- Comparatives Ans Superlatives Explanation and ExerciseDocument4 pagesComparatives Ans Superlatives Explanation and ExerciseMaëlle BeckrichNo ratings yet
- Orthodox Theatre in ByzantiumDocument3 pagesOrthodox Theatre in ByzantiumASRNo ratings yet
- N Basa Inggris 4 Smt1!22!21 K.penggerak PTSDocument8 pagesN Basa Inggris 4 Smt1!22!21 K.penggerak PTSNisaillah KholidiyahNo ratings yet
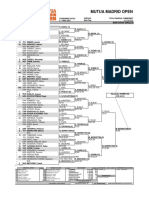
- Mutua Madrid Open: City, Country Tournament Dates Surface Total Financial CommitmentDocument1 pageMutua Madrid Open: City, Country Tournament Dates Surface Total Financial CommitmentMarco Fiammata XBOXNo ratings yet
- ReflectiveDocument2 pagesReflectiveRowena Matte FabularNo ratings yet
- Khawas Ji Ki HaveliDocument2 pagesKhawas Ji Ki HaveliAayushi GoyalNo ratings yet
- Hits HuluDocument16 pagesHits HuluborgespaulohenriquenascimentoNo ratings yet
- Revision Notes Chapter - 13 Sound: Sound: Vibrations That Travel Through The Air or Another Medium and Can Be Heard WhenDocument5 pagesRevision Notes Chapter - 13 Sound: Sound: Vibrations That Travel Through The Air or Another Medium and Can Be Heard WhenAarush SharmaNo ratings yet
- Creigs Quarantined Workout PlanDocument10 pagesCreigs Quarantined Workout PlanCreig BracamontesNo ratings yet
- 180 Days of Math 3rd GradeDocument180 pages180 Days of Math 3rd GradeasmaNo ratings yet
- Black Gospel Music in SDA ChurchDocument4 pagesBlack Gospel Music in SDA ChurchHeather Capps100% (3)
- Up PeriscopeDocument145 pagesUp Periscoperemow100% (4)
- Actor NotesDocument2 pagesActor NotesMICHAEL PRITCHARDNo ratings yet
- Kazakhstan AlmatyDocument15 pagesKazakhstan AlmatyDi AmanNo ratings yet
- Kiyana, An Erotic TaleDocument37 pagesKiyana, An Erotic TaleLinus RiigaNo ratings yet
- Teacher Notes Stereochemistry LabDocument5 pagesTeacher Notes Stereochemistry Labjiwanjotmann26No ratings yet
- FINAL EDIT 2011grad ScriptDocument15 pagesFINAL EDIT 2011grad ScriptYemmy96% (56)
- Hes 386 Poster Breanna CrockettDocument2 pagesHes 386 Poster Breanna CrockettManuel FerreiraNo ratings yet
- Last Six Months Important Sports Current Affairs PDFDocument67 pagesLast Six Months Important Sports Current Affairs PDFkumarNo ratings yet
- Recreation and LeisureDocument42 pagesRecreation and LeisureGina del Mar75% (4)
- Lenovo ThinkCentre by Bizgram Whatsapp 87776955 PDFDocument5 pagesLenovo ThinkCentre by Bizgram Whatsapp 87776955 PDFBizgram AsiaNo ratings yet