You might also like
- DC Unit1 PDFDocument35 pagesDC Unit1 PDFMd.Arifur RahmanNo ratings yet
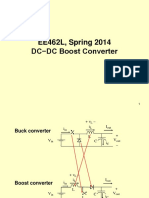
- DC DC Boost ConverterDocument21 pagesDC DC Boost Converterrokbraihan2No ratings yet
- First Course On Power System SlidesDocument243 pagesFirst Course On Power System Slidessavannah78No ratings yet
- EE462L PI ControllerDocument19 pagesEE462L PI ControllerMd.Arifur RahmanNo ratings yet
- 7 Ee462l DC DC BoostDocument12 pages7 Ee462l DC DC Boosttt_aljobory3911No ratings yet
- Diode Bridge Rectifier CapacitorDocument15 pagesDiode Bridge Rectifier Capacitoranand100% (1)
- Choppers 130502054045 Phpapp01Document50 pagesChoppers 130502054045 Phpapp01Md.Arifur RahmanNo ratings yet
- LabManual PSBook2006 Revised Sept2010Document53 pagesLabManual PSBook2006 Revised Sept2010boopelectraNo ratings yet
- Thyristor ConvertersDocument24 pagesThyristor ConvertersAishuNo ratings yet
- %% Graph Sketching: All All LongDocument2 pages%% Graph Sketching: All All LongMd.Arifur RahmanNo ratings yet
- Defination of Nuclear Power Plant Schematic Diagram of Nuclear Power Plant Components of Nuclear Power PlantDocument2 pagesDefination of Nuclear Power Plant Schematic Diagram of Nuclear Power Plant Components of Nuclear Power PlantMd.Arifur RahmanNo ratings yet
- Defination of Nuclear Power Plant Schematic Diagram of Nuclear Power Plant Components of Nuclear Power PlantDocument2 pagesDefination of Nuclear Power Plant Schematic Diagram of Nuclear Power Plant Components of Nuclear Power PlantMd.Arifur RahmanNo ratings yet
- An Introduction To Matlab: Kocaeli University Assist. Prof. Dr. Osman Büyük Digital Signal Processing ApplicationsDocument37 pagesAn Introduction To Matlab: Kocaeli University Assist. Prof. Dr. Osman Büyük Digital Signal Processing ApplicationsMd.Arifur RahmanNo ratings yet
- HVDC Voltage ControlDocument11 pagesHVDC Voltage ControlMd.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document2 pagesDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur Rahman100% (1)
- Mid 471Document4 pagesMid 471Md.Arifur RahmanNo ratings yet
- Mid 471 - Summer15Document4 pagesMid 471 - Summer15Md.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document2 pagesDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur Rahman100% (1)
- HVDC Voltage ControlDocument11 pagesHVDC Voltage ControlMd.Arifur RahmanNo ratings yet
- Mid 471 - Copy Mid Sp15Document6 pagesMid 471 - Copy Mid Sp15Md.Arifur Rahman100% (1)
- New Microsoft Word DocumentDocument2 pagesNew Microsoft Word DocumentMd.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- MicroprocessorDocument1 pageMicroprocessorMd.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- Base Current (IB) Vs Load Current (IL) For 100 ResistorDocument1 pageBase Current (IB) Vs Load Current (IL) For 100 ResistorMd.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- Department of Electrical and Electronic Engineering United International University (UIU)Document1 pageDepartment of Electrical and Electronic Engineering United International University (UIU)Md.Arifur RahmanNo ratings yet
- Nuclear Power Plant Uiu ArifurDocument49 pagesNuclear Power Plant Uiu ArifurMd.Arifur RahmanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Vibration Measurement PDFDocument64 pagesVibration Measurement PDFAnonymous mXicTi8hBNo ratings yet
- Dspa 17ec751 M5Document34 pagesDspa 17ec751 M5digital loveNo ratings yet
- SSC Imd Electronics 1Document25 pagesSSC Imd Electronics 1kartikNo ratings yet
- Data Communication & NetworkingDocument24 pagesData Communication & NetworkingAresha KhanNo ratings yet
- SP015 PDFDocument9 pagesSP015 PDFViplav SachanNo ratings yet
- Chapter 12 - ADC TestingDocument87 pagesChapter 12 - ADC TestingMonal Bhoyar100% (1)
- CH 1Document24 pagesCH 1chuhpsdustinNo ratings yet
- SCS6105200904 Digital Signals ProcessingDocument5 pagesSCS6105200904 Digital Signals ProcessingAmkelani Damian SikosanaNo ratings yet
- Ot Comm X PDFDocument67 pagesOt Comm X PDFKevin Luis Markus PinedaNo ratings yet
- 24-Analog Electronic Filters - Hercules G. DimopoulosDocument9 pages24-Analog Electronic Filters - Hercules G. DimopoulosJuan Luis Mamani SirpaNo ratings yet
- Digital Storage TDS 2004CDocument8 pagesDigital Storage TDS 2004Cenghemo89No ratings yet
- Signals All Lab Exam and Quiz PDFDocument82 pagesSignals All Lab Exam and Quiz PDFJitlee PapaNo ratings yet
- SDS1000X-E Series: Super Phosphor OscilloscopeDocument20 pagesSDS1000X-E Series: Super Phosphor OscilloscopeAugusto RadaelliNo ratings yet
- File 1Document99 pagesFile 1ue06037No ratings yet
- Telecommunications NotesDocument32 pagesTelecommunications NotesKnowledge MhodiNo ratings yet
- Integration of Chromatographic PeaksDocument23 pagesIntegration of Chromatographic PeaksSAISIVARAMAKRISHNA KATTULANo ratings yet
- Signals and Systems: Lecture 13 Wednesday 6 December 2017Document34 pagesSignals and Systems: Lecture 13 Wednesday 6 December 2017aniNo ratings yet
- Calibration and Utilization of SMARTEARDocument88 pagesCalibration and Utilization of SMARTEARBaramondeNo ratings yet
- FabFilter Pro Q2Document43 pagesFabFilter Pro Q2AdrianNo ratings yet
- 78M6612 Single-Phase, Dual-Outlet Power and Energy Measurement ICDocument46 pages78M6612 Single-Phase, Dual-Outlet Power and Energy Measurement ICAn Huynh VanNo ratings yet
- M002 069 3 - Mobi PackDocument12 pagesM002 069 3 - Mobi PackAnonymous OFwyjaMyNo ratings yet
- Dpscope - Build Your Own Usb/Pc-Based Oscilloscope: InstructablesDocument44 pagesDpscope - Build Your Own Usb/Pc-Based Oscilloscope: Instructablesuimarin14No ratings yet
- Passport Alchemy 3.0 User ManualDocument4 pagesPassport Alchemy 3.0 User ManualAnonymous uPG9xzmj0% (1)
- HW 09 SolDocument24 pagesHW 09 SolNanilyn TumlodNo ratings yet
- SDL Mixer Tutoria PDFDocument100 pagesSDL Mixer Tutoria PDFAhmed AdelNo ratings yet
- Digital To Analogue ConvertersDocument6 pagesDigital To Analogue ConvertersAbhinav SharmaNo ratings yet
- Median Filters Theory and ApplicationsDocument5 pagesMedian Filters Theory and Applicationsprasannakumar_7No ratings yet
- ASTM D4945 - 17 Standard Test Method For High-Strain Dynamic Testing of Deep Foundations PDFDocument10 pagesASTM D4945 - 17 Standard Test Method For High-Strain Dynamic Testing of Deep Foundations PDFAnuj Kumar SinghNo ratings yet
- SDR and GnuDocument37 pagesSDR and GnuyewubNo ratings yet
- 3 Signals and SystemsDocument41 pages3 Signals and SystemsSudeshNo ratings yet