You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Pricol Limited - Broker Research - 2017 PDFDocument25 pagesPricol Limited - Broker Research - 2017 PDFnishthaNo ratings yet
- Bond GraphDocument5 pagesBond GraphMila Dhari NovianaNo ratings yet
- Indo-Coal Nar 5600-5400 Full Corporate Cif ChinaDocument6 pagesIndo-Coal Nar 5600-5400 Full Corporate Cif ChinaYusri Tang100% (1)
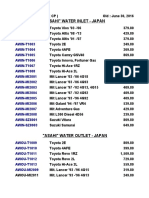
- "Asahi" Water Inlet - Japan: Asahi Water Products (Art Motor Parts) Page 1 of 2Document2 pages"Asahi" Water Inlet - Japan: Asahi Water Products (Art Motor Parts) Page 1 of 2Antonio OngNo ratings yet
- CVT Mitsubishi 1Document12 pagesCVT Mitsubishi 1Humberto Lojan50% (2)
- Updated FC Road User Permit - FEU To Festival MallDocument1 pageUpdated FC Road User Permit - FEU To Festival MallWild Flower Bhiebe67% (6)
- Resume - Sheetal Tantia Dec 2017Document4 pagesResume - Sheetal Tantia Dec 2017Tantia AadityaNo ratings yet
- Pauselli 900 Solar Pile Driver BrochureDocument4 pagesPauselli 900 Solar Pile Driver BrochureJaouad Id Boubker100% (1)
- Automobile Chassis Short Notes Unit 1Document56 pagesAutomobile Chassis Short Notes Unit 1Ranjit Rajendran100% (5)
- J208V06 enDocument4 pagesJ208V06 enMartin KratkyNo ratings yet
- Radio Telephony NotesDocument8 pagesRadio Telephony Notesaaron827077No ratings yet
- OMHEC Guidance For Training StandardDocument32 pagesOMHEC Guidance For Training StandardDimitar LevskiNo ratings yet
- SUMUDocument12 pagesSUMUJean Anderson WilliamsNo ratings yet
- Đề Thi Cuối Kỳ - Pre IELTS (L+R+W) (Update 03.2021)Document9 pagesĐề Thi Cuối Kỳ - Pre IELTS (L+R+W) (Update 03.2021)Huy HoàngNo ratings yet
- 6.1 Chapter 2 Master PlanDocument22 pages6.1 Chapter 2 Master PlanUmesh Bindu Shrestha100% (2)
- SIR System o Bolsas de AireDocument17 pagesSIR System o Bolsas de AireJesus Maria LizarzabalNo ratings yet
- Midland Publishing - US Air Force - The New CenturyDocument176 pagesMidland Publishing - US Air Force - The New CenturyNickiedeposieNo ratings yet
- 20 Best Places To Visit in Croatia - Discover Croatia Travel Guide (PDFDrive)Document63 pages20 Best Places To Visit in Croatia - Discover Croatia Travel Guide (PDFDrive)lam kyNo ratings yet
- RS150 (K56J) PartsCatalogue2016Document116 pagesRS150 (K56J) PartsCatalogue2016gdon86% (7)
- Warehouse LogisticsDocument12 pagesWarehouse LogisticsarzusafranNo ratings yet
- Oil and Gas: Sector ProfileDocument21 pagesOil and Gas: Sector ProfileKalpitNo ratings yet
- Zenith Aviation - Air RegulationsDocument100 pagesZenith Aviation - Air RegulationsParas Aggarwal75% (4)
- Welcome To DeKalb: 2018 Newcomers Guide by Champion NewspaperDocument48 pagesWelcome To DeKalb: 2018 Newcomers Guide by Champion NewspaperDonna S. Seay100% (1)
- Brazo Articulado Palfinger PK4051Document5 pagesBrazo Articulado Palfinger PK4051Asistente MercadeoNo ratings yet
- KIAHDocument68 pagesKIAHAlex ThomasNo ratings yet
- TML Ir Ar 2018 19 PDFDocument406 pagesTML Ir Ar 2018 19 PDFHarsh TimbadiaNo ratings yet
- 1 s2.0 S1270963813000771 Main PDFDocument12 pages1 s2.0 S1270963813000771 Main PDFAwan AJaNo ratings yet
- Craftsman Garden Tractor Owners Manual L0901647 PDFDocument72 pagesCraftsman Garden Tractor Owners Manual L0901647 PDFFrank SnyderNo ratings yet
- Furnace Tube Pipeline PiggingDocument8 pagesFurnace Tube Pipeline PiggingPervez0% (1)
- China Airlines v. ChiokDocument2 pagesChina Airlines v. ChiokVince MontealtoNo ratings yet