You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Super CapacitorDocument15 pagesSuper CapacitorSUSHMA100% (1)
- RFID-based prepaid energy meter improves cash flowDocument2 pagesRFID-based prepaid energy meter improves cash flowSUSHMANo ratings yet
- Electrical EngineeringDocument2 pagesElectrical EngineeringSantosh SandyNo ratings yet
- Electrical MachinesDocument54 pagesElectrical MachinesSUSHMANo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Python ControlDocument99 pagesPython ControlJesus Alonso DiazNo ratings yet
- EC6405 Control Systems EngineeringDocument30 pagesEC6405 Control Systems EngineeringAl-ShukaNo ratings yet
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersDocument10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersFelipeFalconiNo ratings yet
- New Positive-Sequence Voltage Detector For Grid Synchronization of Power Converters Under Faulty Grid ConditionsDocument7 pagesNew Positive-Sequence Voltage Detector For Grid Synchronization of Power Converters Under Faulty Grid ConditionsThiago Moura GalvãoNo ratings yet
- Chapter 3 Stability of DCSDocument34 pagesChapter 3 Stability of DCSAnonymous AFFiZnNo ratings yet
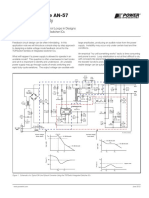
- Topswitch Family: Application Note An-57Document16 pagesTopswitch Family: Application Note An-57Paulo de Amorim CostaNo ratings yet
- Notes 191013 143423 c20Document3 pagesNotes 191013 143423 c20M Umar ChatthaNo ratings yet
- Stability Analysis Roots Left Half PlaneDocument9 pagesStability Analysis Roots Left Half PlaneAnkur SinghNo ratings yet
- MATLAB Course - Part 2Document71 pagesMATLAB Course - Part 2Prathak JienkulsawadNo ratings yet
- Notes Tee602 Bode Plot PDFDocument23 pagesNotes Tee602 Bode Plot PDFtansnvarmaNo ratings yet
- Cse PDFDocument33 pagesCse PDFSha Nkar JavleNo ratings yet
- Automatic Control Systems Kuo Ed3Document671 pagesAutomatic Control Systems Kuo Ed3IonelCopNo ratings yet
- Low Frequency Response of CE AmplifierDocument45 pagesLow Frequency Response of CE Amplifierilg1No ratings yet
- Matlab NootbookDocument18 pagesMatlab Nootbookengrmishtiaq100% (1)
- Control Systems U3 (TEL306)Document84 pagesControl Systems U3 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- Time - Delay - Systems - Anjan RaksitDocument25 pagesTime - Delay - Systems - Anjan RaksitsouravNo ratings yet
- Chapter 14, Problem 11.: Proprietary Material. © 2007 The Mcgraw-Hill Companies, Inc. All Rights Reserved. No PartDocument6 pagesChapter 14, Problem 11.: Proprietary Material. © 2007 The Mcgraw-Hill Companies, Inc. All Rights Reserved. No PartsuxoNo ratings yet
- BJT Frequency ResponseDocument32 pagesBJT Frequency ResponseBryan Owen Salcedo SantosNo ratings yet
- Analog Electronic Circuits and System 3e Gary Ford Carl ArftDocument134 pagesAnalog Electronic Circuits and System 3e Gary Ford Carl ArftTrevor CooperNo ratings yet
- Infineon-ApplicationNote EvaluationBoard EVAL 3kW 2LLC CFD7-AN-v01 00-ENDocument58 pagesInfineon-ApplicationNote EvaluationBoard EVAL 3kW 2LLC CFD7-AN-v01 00-ENCristian BandilaNo ratings yet
- Filter DesignDocument15 pagesFilter DesigngeokaragNo ratings yet
- PDFDocument2 pagesPDFElizabeth BrownNo ratings yet
- EC6405-Control Systems EngineeringDocument12 pagesEC6405-Control Systems EngineeringAnonymous XhmybK0% (1)
- Control System Lab Exercise PDFDocument59 pagesControl System Lab Exercise PDFilijakljNo ratings yet
- Dytran Documentation TheoryDocument35 pagesDytran Documentation TheoryGeorges KouroussisNo ratings yet
- Regulation – Control Systems Theory Course OutcomesDocument7 pagesRegulation – Control Systems Theory Course OutcomeskesavantNo ratings yet
- Polar Plot, Nyquist PlotDocument19 pagesPolar Plot, Nyquist PlotSirshendu100% (1)
- Circuit Analysis II With MATLAB - Steven T. KarrisDocument501 pagesCircuit Analysis II With MATLAB - Steven T. Karriscursedpoetic100% (1)
- Control Systems Engineering - Nagrath I.J. and Gopal M.Document81 pagesControl Systems Engineering - Nagrath I.J. and Gopal M.Amber Agrawal22% (9)
- Stiff Bias Common Emitter Amplifier LabDocument4 pagesStiff Bias Common Emitter Amplifier LabAswin BalasubramaniamNo ratings yet