You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Performance Data of Propellers For High Speed Craft (Newton Rader)Document37 pagesPerformance Data of Propellers For High Speed Craft (Newton Rader)Michael McDonald100% (1)
- 27th Symposium On Naval Hydrodynamics 2008, Vol 2 of 2Document4 pages27th Symposium On Naval Hydrodynamics 2008, Vol 2 of 2Michael McDonaldNo ratings yet
- The Resistance and The Resistance and Trim of Semi-Displacement, Double-Chine, Transom-Stern Hull SeriesTrim of Semi-Displacement, Double-Chine, Transom-Stern Hull Series - FAST 2001Document9 pagesThe Resistance and The Resistance and Trim of Semi-Displacement, Double-Chine, Transom-Stern Hull SeriesTrim of Semi-Displacement, Double-Chine, Transom-Stern Hull Series - FAST 2001Michael McDonaldNo ratings yet
- Forane 22 Saturation Pressure Temperature DataDocument1 pageForane 22 Saturation Pressure Temperature Datavineeth100% (1)
- How Bow Shape Affects Seakeeping of Fast Monohulls (LppDocument16 pagesHow Bow Shape Affects Seakeeping of Fast Monohulls (LppMichael McDonaldNo ratings yet
- Effects of Geometry Variations On The Performance of Podded PropulsorsDocument17 pagesEffects of Geometry Variations On The Performance of Podded PropulsorsMichael McDonaldNo ratings yet
- A Parallel Adaptive Mesh Refinement Algorithm For Predicting Turbulent Non-Premixed Combusting FlowsDocument10 pagesA Parallel Adaptive Mesh Refinement Algorithm For Predicting Turbulent Non-Premixed Combusting FlowsMichael McDonaldNo ratings yet
- WaterJet Hull Interaction - TerwisgaDocument304 pagesWaterJet Hull Interaction - TerwisgaMichael McDonaldNo ratings yet
- Final Format Ijsct 89Document11 pagesFinal Format Ijsct 89haujesNo ratings yet
- An Experimental Study of Interceptor'sDocument9 pagesAn Experimental Study of Interceptor'sMichael McDonald100% (1)
- A Parallel Adaptive Mesh Refinement Algorithm For Predicting Turbulent Non-Premixed Combusting FlowsDocument10 pagesA Parallel Adaptive Mesh Refinement Algorithm For Predicting Turbulent Non-Premixed Combusting FlowsMichael McDonaldNo ratings yet
- On The Design and Analysis of Pre-Swirl Stators For Single and Twin Screw ShipsDocument8 pagesOn The Design and Analysis of Pre-Swirl Stators For Single and Twin Screw ShipsMichael McDonaldNo ratings yet
- Course Keeping of High Speed Craft in Stern Quartering SeaDocument11 pagesCourse Keeping of High Speed Craft in Stern Quartering SeaMichael McDonaldNo ratings yet
- Propulsive Performance Analysis of A Stepped Hull by Model Test Results and Sea Trial DataDocument8 pagesPropulsive Performance Analysis of A Stepped Hull by Model Test Results and Sea Trial DataMichael McDonaldNo ratings yet
- Developing A Computer Program For Mathematical Investigation of Stepped Planing Hull CharacteristicsDocument14 pagesDeveloping A Computer Program For Mathematical Investigation of Stepped Planing Hull CharacteristicsMichael McDonaldNo ratings yet
- Advanced Topics in Stepped Hull Design - Robert Kaidy - IBEX Session104 - 1Document37 pagesAdvanced Topics in Stepped Hull Design - Robert Kaidy - IBEX Session104 - 1Michael McDonald100% (1)
- Two-Dimensional Modeling of Stepped Planing Hulls With Open and Pressurized Air CavitiesDocument10 pagesTwo-Dimensional Modeling of Stepped Planing Hulls With Open and Pressurized Air CavitiesMichael McDonaldNo ratings yet
- Performance Prediction of Hulls With Transverse Steps - v4Document40 pagesPerformance Prediction of Hulls With Transverse Steps - v4Maximilien Abrell50% (2)
- Critical Significance of Human Factors in Ship DesignDocument23 pagesCritical Significance of Human Factors in Ship DesignMichael McDonaldNo ratings yet
- Earth Pressure & Retaining Walls-5Document28 pagesEarth Pressure & Retaining Walls-5Suraj PandeyNo ratings yet
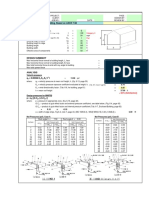
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 pagesWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldNo ratings yet
- Design of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterDocument4 pagesDesign of 6.6 KV, 100 A Saturated DC Reactor Type Superconducting Fault Current LimiterwaleedkhanpelNo ratings yet
- Permanent Magnet Moving Coil InstrumentDocument5 pagesPermanent Magnet Moving Coil InstrumentAnkit BatraNo ratings yet
- Constraint PDFDocument12 pagesConstraint PDFNeelesh BenaraNo ratings yet
- A Comparative Study of Active and Reactive Power Controller For A Doubly Fed Induction Generator (Dfig) Using DPC and Foc StrategiesDocument11 pagesA Comparative Study of Active and Reactive Power Controller For A Doubly Fed Induction Generator (Dfig) Using DPC and Foc Strategiesd_d_trivediNo ratings yet
- Math 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Document8 pagesMath 2280 - Lecture 4: Separable Equations and Applications: Dylan Zwick Fall 2013Kawsar MobinNo ratings yet
- Properties of Matter Test ReviewDocument9 pagesProperties of Matter Test ReviewAngel PeayNo ratings yet
- Nur Aqilah Binti Mohamad AminDocument35 pagesNur Aqilah Binti Mohamad Aminrasim_m1146No ratings yet
- Mech4620 Group 12 Report PDFDocument12 pagesMech4620 Group 12 Report PDFAaron Hoytash100% (1)
- Ground Fault Protection and Coordination in Industrial and Commercial Power SystemsDocument46 pagesGround Fault Protection and Coordination in Industrial and Commercial Power Systemsgerrzen64100% (1)
- Ec8451 - Emf - Unit 1Document5 pagesEc8451 - Emf - Unit 1krithikgokul selvamNo ratings yet
- Lewis Structures Molecular Geometry and Polarity 1A KEYDocument3 pagesLewis Structures Molecular Geometry and Polarity 1A KEYrsleoNo ratings yet
- EMI and ACDocument14 pagesEMI and ACbharathNo ratings yet
- Term 1 - Physics Part 2Document11 pagesTerm 1 - Physics Part 2Gaming TriadNo ratings yet
- Pressure-Grouted Soil Nails Improve Weathered Slope StabilityDocument11 pagesPressure-Grouted Soil Nails Improve Weathered Slope StabilityFrans van der MerweNo ratings yet
- Case Based CH-3 Motion in Straight LineDocument5 pagesCase Based CH-3 Motion in Straight LineGaneshNo ratings yet
- International Zhautykov Olympiad theoretical problemsDocument5 pagesInternational Zhautykov Olympiad theoretical problemsEdi nbaNo ratings yet
- Resume AyanchattopadhyayDocument2 pagesResume Ayanchattopadhyayapi-163237383No ratings yet
- The CRS A255 RobotDocument20 pagesThe CRS A255 RobotnguyendattdhNo ratings yet
- Chapter 1Document55 pagesChapter 1nur izzah fatiniNo ratings yet
- Biazar Aminikhah Burgers EquationDocument7 pagesBiazar Aminikhah Burgers EquationSaeb AmirAhmadi ChomacharNo ratings yet
- Science and TechnologyDocument10 pagesScience and TechnologyentjinrNo ratings yet
- Foundation Class X PCMBDocument1,571 pagesFoundation Class X PCMBJack CrookNo ratings yet
- Moment of Inertia of FlywheelDocument3 pagesMoment of Inertia of FlywheelFinney WilsonNo ratings yet
- Electrical Circuits & Networks Question BankDocument6 pagesElectrical Circuits & Networks Question BankMATHANKUMAR.S100% (1)
- Lang SethDocument52 pagesLang Sethrrmerlin_2No ratings yet
- Errata FE WasimDocument4 pagesErrata FE WasimchafobostonNo ratings yet
- MRAM: Magnetic Random Access MemoryDocument15 pagesMRAM: Magnetic Random Access MemoryJoyitaNo ratings yet