You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Axpert VP-1000&VP-2000 Service Manual PF 1 20191022Document27 pagesAxpert VP-1000&VP-2000 Service Manual PF 1 20191022migsayal0% (1)
- Arduino Info Nrf24L01 2.4GHz HowToDocument23 pagesArduino Info Nrf24L01 2.4GHz HowToDirane MiguehNo ratings yet
- W1209Document6 pagesW1209priya100% (2)
- OPTI-6100 Quick Start Guide: Document Number: 61184500L1-13B CLEI: SOC280YG - October 2005Document28 pagesOPTI-6100 Quick Start Guide: Document Number: 61184500L1-13B CLEI: SOC280YG - October 2005Osama AltobuliNo ratings yet
- Variator TensiuneDocument8 pagesVariator TensiuneCristyMitre100% (1)
- Unit-1 - 6703 Embedded and Real Time SystemsDocument167 pagesUnit-1 - 6703 Embedded and Real Time SystemsRehana100% (4)
- Work Book 2bDocument40 pagesWork Book 2bgreyllom9791No ratings yet
- Pickit 3 LPC Demo Board GBRDocument2 pagesPickit 3 LPC Demo Board GBRgreyllom9791No ratings yet
- Pickit 3 LPC Demo Board SCHDocument1 pagePickit 3 LPC Demo Board SCHNhâtTânNo ratings yet
- Material What Are You Doing PDFDocument38 pagesMaterial What Are You Doing PDFDavid FernandoNo ratings yet
- Material The Place Where I Live PDFDocument28 pagesMaterial The Place Where I Live PDFzuleiny castroNo ratings yet
- Hertz: kW/kVA@1.0 P.F. 480 VoltDocument2 pagesHertz: kW/kVA@1.0 P.F. 480 Voltgreyllom9791No ratings yet
- Resimold Resiglas CRT DryType CommercialBrochure enDocument12 pagesResimold Resiglas CRT DryType CommercialBrochure engreyllom9791No ratings yet
- Vol07 Tab03Document208 pagesVol07 Tab03Senthil KumarNo ratings yet
- ABB Manual Motor Starters MS116, MS325 and MS4xx PDFDocument35 pagesABB Manual Motor Starters MS116, MS325 and MS4xx PDFgreyllom9791No ratings yet
- Problem A 1 JoseDocument4 pagesProblem A 1 Josegreyllom9791No ratings yet
- EMT Solution Manual 3rd Edition SadikuDocument422 pagesEMT Solution Manual 3rd Edition Sadikum_mahdiroodi85% (26)
- SB551G Generadores PDFDocument6 pagesSB551G Generadores PDFgreyllom9791No ratings yet
- Lista de Productos: Rele Termico Rt1 Clase 10ADocument4 pagesLista de Productos: Rele Termico Rt1 Clase 10Agreyllom9791100% (1)
- Calculating Short-Circuit Currents With Contributions Motor PDFDocument8 pagesCalculating Short-Circuit Currents With Contributions Motor PDFgreyllom9791No ratings yet
- E500 FD Rel11 Part6 RTU FunctionsDocument113 pagesE500 FD Rel11 Part6 RTU FunctionsЖорж КаназирскиNo ratings yet
- EC2-111 Universal ControllerDocument2 pagesEC2-111 Universal ControllerMaria DazaNo ratings yet
- Ctia Cdma Test Plan Rev 4.0Document63 pagesCtia Cdma Test Plan Rev 4.0Dhanny SetyawanNo ratings yet
- Analog Electronics - EC-EE-IN Combine - Done IITKDocument36 pagesAnalog Electronics - EC-EE-IN Combine - Done IITKSatyam TecNo ratings yet
- AC9 User GuideDocument124 pagesAC9 User GuideDaniel IsailaNo ratings yet
- AP Physics Chapter 18 Basic Electric CircuitsDocument46 pagesAP Physics Chapter 18 Basic Electric CircuitsThillai8975No ratings yet
- T6M ControllerDocument2 pagesT6M ControllerDenny Rachmad Atthahary50% (2)
- HP Z600 Workstation Memory Configuration and OptimizationDocument2 pagesHP Z600 Workstation Memory Configuration and Optimizationtone_n_tuneNo ratings yet
- Development Kit For The CANBus Exercise Book - 10.12.05 PDFDocument51 pagesDevelopment Kit For The CANBus Exercise Book - 10.12.05 PDFSneider AlvarezNo ratings yet
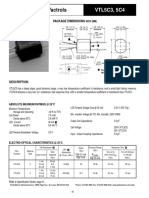
- Low Cost Axial Vactrols: VTL5C3, 5C4Document2 pagesLow Cost Axial Vactrols: VTL5C3, 5C4sillyNo ratings yet
- Specifications Dimension: (Unit: MM) 55SVH7EDocument1 pageSpecifications Dimension: (Unit: MM) 55SVH7Edervis quinteroNo ratings yet
- COA Unit 1 Lecture 4Document35 pagesCOA Unit 1 Lecture 4Pratibha SNo ratings yet
- 75u50 SsdiDocument3 pages75u50 SsdiArnold DuarteNo ratings yet
- DMR-EX89 Service ManualDocument96 pagesDMR-EX89 Service ManualEmjay111100% (1)
- Radio User 2021 011 - NovemberDocument66 pagesRadio User 2021 011 - NovemberAl KNo ratings yet
- How To Calibrate Your Equipment Using Color BarsDocument6 pagesHow To Calibrate Your Equipment Using Color BarsAnirban GhoseNo ratings yet
- Yagi Antenna: SpecificationsDocument2 pagesYagi Antenna: SpecificationsVirgil PeiulescuNo ratings yet
- UG Core CoursesDocument26 pagesUG Core Coursesraja viriyalaNo ratings yet
- Msdac Project1Document20 pagesMsdac Project1SGVU UniversityNo ratings yet
- VEPG4 Installation Guide 06 20 2019Document123 pagesVEPG4 Installation Guide 06 20 2019LeonardusNo ratings yet
- UMTS Chap6Document33 pagesUMTS Chap6NguyenDucTaiNo ratings yet
- 89HPES24T3G2 Hardware Design Guide: NotesDocument10 pages89HPES24T3G2 Hardware Design Guide: NotesDavidNo ratings yet
- Tokheim8e Ch2 PPTDocument27 pagesTokheim8e Ch2 PPTAlexandre Anderson AlvesNo ratings yet
- MINI-LINK Craft Online HelpDocument10 pagesMINI-LINK Craft Online HelpDanish RashidNo ratings yet