You might also like
- AnswersDocument6 pagesAnswersThota DeepNo ratings yet
- Nambiar NumberDocument2 pagesNambiar NumberaddssdfaNo ratings yet
- MileStone-2 Exam Question Answer (Maybe)Document18 pagesMileStone-2 Exam Question Answer (Maybe)Debasis DuttaNo ratings yet
- Rating Students: RequirementsDocument3 pagesRating Students: Requirementskanike chiranjeeviNo ratings yet
- Lecture-07 - Gauss Ellimination Methods and Cramers RuleDocument48 pagesLecture-07 - Gauss Ellimination Methods and Cramers RuleShubham rajNo ratings yet
- Java PRP ProgramsDocument12 pagesJava PRP Programskrishna kanth RedddyNo ratings yet
- Find KeyDocument2 pagesFind KeyLuckysingh Negi100% (1)
- Find maximum sum path in two sorted arraysDocument25 pagesFind maximum sum path in two sorted arraysRishav KarNo ratings yet
- JavashreyDocument15 pagesJavashreyshreyaNo ratings yet
- Milestones BITS FinalDocument87 pagesMilestones BITS FinalThota DeepNo ratings yet
- Chapter 3 - Client-Side Scripting LanguageDocument49 pagesChapter 3 - Client-Side Scripting LanguageDafuq Malone100% (1)
- Java QuestionsDocument14 pagesJava QuestionsAircc AirccseNo ratings yet
- Vehicles Detection and Counting Based On Internet of Things Technology and Video Processing TechniquesDocument9 pagesVehicles Detection and Counting Based On Internet of Things Technology and Video Processing TechniquesIAES IJAINo ratings yet
- Chapter-1: Tower of HanoiDocument28 pagesChapter-1: Tower of HanoiTameemuddinNo ratings yet
- Identify The Structure Implemented in The Following Layout Diagram and Draw Its Equivalent CMOS ImplementationDocument2 pagesIdentify The Structure Implemented in The Following Layout Diagram and Draw Its Equivalent CMOS Implementationrishika chhibberNo ratings yet
- Interview Questions-Data PatternsDocument2 pagesInterview Questions-Data Patternssarav dNo ratings yet
- Assignment 2Document12 pagesAssignment 2DÈrríçk Thê RåcérNo ratings yet
- 11Document13 pages11Manish MadhavNo ratings yet
- SQL Aggregate Functions Count, Min, Max, Sum, AvgDocument11 pagesSQL Aggregate Functions Count, Min, Max, Sum, AvgZahra BatoolNo ratings yet
- Set 3Document25 pagesSet 3AANo ratings yet
- Engine cycle analysis and efficiency parametersDocument3 pagesEngine cycle analysis and efficiency parametersISsa Qafa'itiNo ratings yet
- Java class methods calculate volume, powers staticDocument3 pagesJava class methods calculate volume, powers staticJohn SmithNo ratings yet
- Automata Old QuetionsDocument4 pagesAutomata Old QuetionsAravind SoundararajanNo ratings yet
- Tree Search Using MPI With Static and Dynamic Partitioning PDFDocument9 pagesTree Search Using MPI With Static and Dynamic Partitioning PDFTest UbuntuNo ratings yet
- Indiahacks Algorithm2Document8 pagesIndiahacks Algorithm2Nitesh SahniNo ratings yet
- File 2Document5 pagesFile 2A KarthikNo ratings yet
- Questions - Final Exam - LaTeX101x Courseware - IITBombayXDocument16 pagesQuestions - Final Exam - LaTeX101x Courseware - IITBombayXpawaryogesh50% (2)
- Gupta N GuptaDocument25 pagesGupta N Guptaaaryankr.143No ratings yet
- Hexaware 6th FEB 2022Document12 pagesHexaware 6th FEB 2022Raja RajanNo ratings yet
- 113 QUES NEW (Core Java Assesment)Document226 pages113 QUES NEW (Core Java Assesment)Anonymous URKicV100% (2)
- 18mat31 Module-4Document48 pages18mat31 Module-4Parthasarathy T100% (1)
- TCS Input and OutputDocument8 pagesTCS Input and OutputChannu HiremathNo ratings yet
- Assessment MilestoneDocument37 pagesAssessment MilestonePONNAMANENI INDU100% (1)
- Maximum of Unstable-Minimum of UnstableDocument3 pagesMaximum of Unstable-Minimum of Unstablekummetha vanithaNo ratings yet
- Computer ScienceDocument11 pagesComputer Scienceali0% (1)
- Database ApplicationsDocument9 pagesDatabase ApplicationsRussell GarciaNo ratings yet
- Tech Mahindra Programming Round Coding Questions: #IncludeDocument15 pagesTech Mahindra Programming Round Coding Questions: #IncludeAnil BikkinaNo ratings yet
- Zoho Level1Document118 pagesZoho Level1anitha E100% (1)
- ICSE VII Computers More in HTMLDocument24 pagesICSE VII Computers More in HTMLSarika JoshiNo ratings yet
- Amcat Computer Science Questions-Part-1Document4 pagesAmcat Computer Science Questions-Part-1SuryaNo ratings yet
- TCS Adv MCQ With AnswersDocument34 pagesTCS Adv MCQ With AnswersPoojith KodavaluruNo ratings yet
- Java MCQ AnsDocument8 pagesJava MCQ AnsDashrath BawneNo ratings yet
- Design of Power Efficient Posit Multiplier Using Compressor Based AdderDocument8 pagesDesign of Power Efficient Posit Multiplier Using Compressor Based AdderIJRASETPublicationsNo ratings yet
- 5.cell Splitting, Sectoring, and MicrocellDocument21 pages5.cell Splitting, Sectoring, and MicrocellAnkit KumarNo ratings yet
- Doubly Linked List Implementation and Traversal in 40 CharactersDocument9 pagesDoubly Linked List Implementation and Traversal in 40 CharactersBechlor StudyNo ratings yet
- Abstract Class - ExpDocument9 pagesAbstract Class - ExpIpsha GuhaNo ratings yet
- Count Odd Even Average and Decimal ConversionDocument16 pagesCount Odd Even Average and Decimal Conversionpriya piyuNo ratings yet
- 1qayeuwcp Pn1feivlcakrjgkgs2p MjsDocument73 pages1qayeuwcp Pn1feivlcakrjgkgs2p Mjspriya piyuNo ratings yet
- 4.userid Generation Question and AnswersDocument5 pages4.userid Generation Question and Answersaddssdfa100% (1)
- Doubly Linked ListDocument6 pagesDoubly Linked ListshwetajunejaNo ratings yet
- C Programming Questions and AnswersDocument19 pagesC Programming Questions and AnswersBalaji MehtaNo ratings yet
- Viva Voce Questions On Communication SystemsDocument3 pagesViva Voce Questions On Communication SystemsZealWolf100% (3)
- DTDP SyllabusDocument67 pagesDTDP SyllabusEr Ravinder Reddy Devireddy100% (1)
- Calculating the sum of integers until it exceeds 500Document33 pagesCalculating the sum of integers until it exceeds 500IMTEYAZ mallick100% (1)
- Wipro NLTH Coding Answers - 29TH Jan Afternoon SlotDocument7 pagesWipro NLTH Coding Answers - 29TH Jan Afternoon SlotSyedaNo ratings yet
- DeepakpresentationDocument20 pagesDeepakpresentationDEEPAK VERMANo ratings yet
- 4.1: The Comparator: IN REFDocument12 pages4.1: The Comparator: IN REFMadhanDhonianNo ratings yet
- Analysis, Design, and Implementation of A High-Efficiency Full-Wave Rectifier in Standard CMOS TechnologyDocument11 pagesAnalysis, Design, and Implementation of A High-Efficiency Full-Wave Rectifier in Standard CMOS TechnologymohsinmanzoorNo ratings yet
- Design of Low Power Efficient CMOS Dynamic Latch Comparator: A.Pravin, Dr.N.S.Murti Sarma, DR - Fazal Noor BashaDocument6 pagesDesign of Low Power Efficient CMOS Dynamic Latch Comparator: A.Pravin, Dr.N.S.Murti Sarma, DR - Fazal Noor BashaNoReply ProgramNo ratings yet
- A High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersDocument4 pagesA High-Speed High-Resolution Latch Comparator For Pipeline Analog-to-Digital ConvertersJessyNo ratings yet
- Dataflow Diagram SadDocument3 pagesDataflow Diagram SadmdlogicsolutionsNo ratings yet
- Design of PCM Main Memory Embedded ApplicationDocument4 pagesDesign of PCM Main Memory Embedded ApplicationmdlogicsolutionsNo ratings yet
- Project Report For NCLDocument12 pagesProject Report For NCLmdlogicsolutionsNo ratings yet
- Project ReportDocument47 pagesProject ReportmdlogicsolutionsNo ratings yet
- Process Variation Delay and Congestion Aware Routing Algorithm For AsynchronousDocument26 pagesProcess Variation Delay and Congestion Aware Routing Algorithm For AsynchronousmdlogicsolutionsNo ratings yet
- Gate Mapping Automation For Asynchronous NULL Convention Logic CircuitsDocument2 pagesGate Mapping Automation For Asynchronous NULL Convention Logic CircuitsmdlogicsolutionsNo ratings yet
- Noc - Simulation OutputsDocument20 pagesNoc - Simulation OutputsmdlogicsolutionsNo ratings yet
- An Integrated Ultralow Programmable and Configurable Mixed-Mode Fpaa SocDocument1 pageAn Integrated Ultralow Programmable and Configurable Mixed-Mode Fpaa SocmdlogicsolutionsNo ratings yet
- Alternate Topic Low-Power FPGA Controlled ECG-acquisition System For Detection of Cardiac DiseasesDocument5 pagesAlternate Topic Low-Power FPGA Controlled ECG-acquisition System For Detection of Cardiac DiseasesmdlogicsolutionsNo ratings yet
- Adaptive Memory Mapping AlgorithmDocument1 pageAdaptive Memory Mapping AlgorithmmdlogicsolutionsNo ratings yet
- VLSI Design of Superscalar DSP Based On Reconfigurable VLIW ArchitectureDocument2 pagesVLSI Design of Superscalar DSP Based On Reconfigurable VLIW ArchitecturemdlogicsolutionsNo ratings yet
- Verilog CodesDocument26 pagesVerilog CodesmdlogicsolutionsNo ratings yet
- 8 Tap FIR FilterDocument1 page8 Tap FIR FiltermdlogicsolutionsNo ratings yet
- Digital Low-Dropout Regulator With Automatic ConfigurationDocument2 pagesDigital Low-Dropout Regulator With Automatic ConfigurationmdlogicsolutionsNo ratings yet
- PLC16VLS01Document3 pagesPLC16VLS01mdlogicsolutionsNo ratings yet
- Report 1Document56 pagesReport 1mdlogicsolutionsNo ratings yet
- Variable parameter IC testing improves CMOS defect detectionDocument3 pagesVariable parameter IC testing improves CMOS defect detectionmdlogicsolutionsNo ratings yet
- PLC16VLS04Document2 pagesPLC16VLS04mdlogicsolutionsNo ratings yet
- Fpga HardwareDocument32 pagesFpga HardwaremdlogicsolutionsNo ratings yet
- Low Power Data-Aware STT-RAM Based Hybrid Cache ArchitectureDocument1 pageLow Power Data-Aware STT-RAM Based Hybrid Cache ArchitecturemdlogicsolutionsNo ratings yet
- Iir DocDocument65 pagesIir DocmdlogicsolutionsNo ratings yet
- An Efficient VLSI Architecture For Data EncryptionDocument2 pagesAn Efficient VLSI Architecture For Data EncryptionmdlogicsolutionsNo ratings yet
- Double Tail ComparatorDocument32 pagesDouble Tail ComparatormdlogicsolutionsNo ratings yet
- Module Description FFTDocument18 pagesModule Description FFTmdlogicsolutionsNo ratings yet
- Fpga HardwareDocument32 pagesFpga HardwaremdlogicsolutionsNo ratings yet
- Sda MDocument49 pagesSda MmdlogicsolutionsNo ratings yet
- Canny EdgeDocument5 pagesCanny EdgemdlogicsolutionsNo ratings yet
- Slno Ieee - Vlsi Design & Implementation Domain: Neural NetworksDocument2 pagesSlno Ieee - Vlsi Design & Implementation Domain: Neural NetworksmdlogicsolutionsNo ratings yet
- DS CDMA For Multiple Access Collittion AvoidanceDocument4 pagesDS CDMA For Multiple Access Collittion AvoidancemdlogicsolutionsNo ratings yet
- WeekDocument1 pageWeekDivneet Singh KapoorNo ratings yet
- ALUDocument5 pagesALUsofNo ratings yet
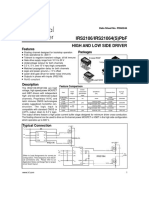
- IRS2106/IRS21064 high and low side driver datasheetDocument25 pagesIRS2106/IRS21064 high and low side driver datasheetmohamedNo ratings yet
- MCT Unit 2Document26 pagesMCT Unit 2Aravind RajNo ratings yet
- VHDL Code To Simulate 4-Bit Binary Counter by SoftwareDocument17 pagesVHDL Code To Simulate 4-Bit Binary Counter by SoftwareAshok kumarNo ratings yet
- 02 ARM Processor FundamentalsDocument65 pages02 ARM Processor Fundamentalsbengaltiger100% (2)
- Bus and Memory TransfersDocument11 pagesBus and Memory TransfersSam-eer Neo-paneyNo ratings yet
- From RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksDocument15 pagesFrom RTL To GDS Using Synopsys Flow Within Less Then 10 WeeksLohitNo ratings yet
- Xilinx Lab RecordDocument76 pagesXilinx Lab RecordDivya SantoshiNo ratings yet
- TV troubleshooting steps to start withDocument1 pageTV troubleshooting steps to start withMuhammad AkmalNo ratings yet
- Ch01 Basic Concepts and Computer EvolutionDocument36 pagesCh01 Basic Concepts and Computer EvolutionMark ShanNo ratings yet
- Synthesis and Place & Route: CS/ECE 6710 Tool SuiteDocument48 pagesSynthesis and Place & Route: CS/ECE 6710 Tool SuitekammohNo ratings yet
- Pin Details and Functions of the Intel 8086 MicroprocessorDocument23 pagesPin Details and Functions of the Intel 8086 MicroprocessorPranav RajNo ratings yet
- Rambus Memory SystemDocument3 pagesRambus Memory Systemapi-3850195No ratings yet
- Design and Implementation of VLSI SystemsDocument45 pagesDesign and Implementation of VLSI SystemsLê Bá Phước LongNo ratings yet
- Chp1 - Latches and Flip-FlopsDocument44 pagesChp1 - Latches and Flip-FlopsAbnen OngNo ratings yet
- Aditya Engineering College (A) : Digital Circuits and Logic Design Synchronous CountersDocument13 pagesAditya Engineering College (A) : Digital Circuits and Logic Design Synchronous CounterskalaNo ratings yet
- Logic GatesDocument11 pagesLogic GatesAsyraf NorahairuzanNo ratings yet
- Microchip ATXMEGA128A1U AU DatasheetDocument214 pagesMicrochip ATXMEGA128A1U AU DatasheetNuno CarriçoNo ratings yet
- Service Manual Vox Vt30: Assembly Sketch 2-3 Block Diagram: 4 Schematic Diagram: 5-6 Parts List: 7-8Document8 pagesService Manual Vox Vt30: Assembly Sketch 2-3 Block Diagram: 4 Schematic Diagram: 5-6 Parts List: 7-8John govanNo ratings yet
- COE 381 Microprocessors - Dr. Boateng v2Document195 pagesCOE 381 Microprocessors - Dr. Boateng v2CArl Simpson LennonNo ratings yet
- MAX803/MAX809/ MAX810 3-Pin Microprocessor Reset Circuits: General Description Benefits and FeaturesDocument8 pagesMAX803/MAX809/ MAX810 3-Pin Microprocessor Reset Circuits: General Description Benefits and FeaturesMaria TzagarakiNo ratings yet
- Digital Logic Gates Lab ReportDocument5 pagesDigital Logic Gates Lab ReportRaja SaadNo ratings yet
- MOS Capacitor, TransistorDocument55 pagesMOS Capacitor, TransistorKrishna RaajanNo ratings yet
- VLSI Questions Answers r3Document79 pagesVLSI Questions Answers r3Gowtham HariNo ratings yet
- Ic 74165Document13 pagesIc 74165Sheela ShivaramNo ratings yet
- 8X300 Reference Manual Oct77 PDFDocument154 pages8X300 Reference Manual Oct77 PDFMathias GutierrezNo ratings yet
- MPMC SyllabusDocument2 pagesMPMC SyllabusKANCHARLAPALLI VENKATESH,CSE(19-23) Vel Tech, ChennaiNo ratings yet
- Bosch chips codes and descriptions decoding guideDocument4 pagesBosch chips codes and descriptions decoding guideDanny EversonNo ratings yet