You might also like
- Calculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsDocument8 pagesCalculation of Power Losses in The Damper Winding Winding of Large Hidrogenerators at Open-Circuit and Load ConditionsWalter SantiNo ratings yet
- Analysis of Stripline-Fed Slot-Coupled Patch Antennas With Vias For Parallel-Plate Mode SuppressionDocument8 pagesAnalysis of Stripline-Fed Slot-Coupled Patch Antennas With Vias For Parallel-Plate Mode SuppressionnaranjitoNo ratings yet
- Analysis and Design Criteria For Fractional Unbalanced Windings of Three-Phase MotorsDocument5 pagesAnalysis and Design Criteria For Fractional Unbalanced Windings of Three-Phase MotorsantonmboxNo ratings yet
- Complex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDocument9 pagesComplex Vector Model of The Squirrel-Cage Induction Machine Including Instantaneous Rotor Bar CurrentsDaniel CamargoNo ratings yet
- Ten Part-Winding Arrangements in Sample 4-Pole Induction MotorDocument6 pagesTen Part-Winding Arrangements in Sample 4-Pole Induction MotorJunaid AhmadNo ratings yet
- Carrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFDocument10 pagesCarrier Signal Based Sensorless Control of Electrically Excited Synchronous PDFKhaled ChaibainouNo ratings yet
- WindingDocument49 pagesWindingserpent7700No ratings yet
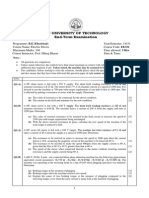
- Machines Tutorial Sheet #3 (2024)Document4 pagesMachines Tutorial Sheet #3 (2024)Riya KoretiNo ratings yet
- Xiicleee RBP 1754revDocument6 pagesXiicleee RBP 1754revrbargallo0No ratings yet
- Ferro Panel 2003Document6 pagesFerro Panel 2003_FlyMan_No ratings yet
- Transient Theory of Synchronous Generator Under Unbalanced ConditionsDocument17 pagesTransient Theory of Synchronous Generator Under Unbalanced ConditionsEdgar BravoNo ratings yet
- Leakage Inductance Calculations in Dierent Geometries of Traction TransformersDocument7 pagesLeakage Inductance Calculations in Dierent Geometries of Traction Transformersbtd2011No ratings yet
- Matrix Analysis Techniques in Cage Induction Machines: David G. DorrellDocument7 pagesMatrix Analysis Techniques in Cage Induction Machines: David G. Dorrellni60No ratings yet
- Analysis of Dynamic Eccentricity Related Signatures On Stator Current of Squirrel Cage Induction MotorsDocument6 pagesAnalysis of Dynamic Eccentricity Related Signatures On Stator Current of Squirrel Cage Induction MotorsCarlos NúñezNo ratings yet
- Calculation of Cogging TorqueDocument4 pagesCalculation of Cogging TorqueMehdi SepehriNo ratings yet
- Fundamentals of Space-Vector TheoryDocument16 pagesFundamentals of Space-Vector Theoryhn317No ratings yet
- Calculation of Winding Inductances For A Single-Phase Brushless DC MachineDocument4 pagesCalculation of Winding Inductances For A Single-Phase Brushless DC MachineZøt MythNo ratings yet
- ConverDocument11 pagesConverAnonymous tJgIbVzpNo ratings yet
- A Design Method For Cage Induction Motors With Non-Skewed Rotor BarsDocument2 pagesA Design Method For Cage Induction Motors With Non-Skewed Rotor BarsLava KumarNo ratings yet
- Fundamentals of Space-Vector TheoryDocument16 pagesFundamentals of Space-Vector Theoryni60No ratings yet
- Analysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgberDocument7 pagesAnalysis of Detent Torque in Hybrid Stepping Motors: Jonathan U AgbertheijesNo ratings yet
- Review Questions For Electrical Machines and DrivesDocument14 pagesReview Questions For Electrical Machines and DrivesClifford MkongNo ratings yet
- Modeling and Parameter Identification of A Double-Star Induction MachinesDocument7 pagesModeling and Parameter Identification of A Double-Star Induction MachineshaimantiNo ratings yet
- 4 and 6 Pole MotorDocument6 pages4 and 6 Pole Motorarajamani78100% (1)
- A Harmonic Model For The Nonlinearities of Single Phase Transformer With Describing FunctionsDocument6 pagesA Harmonic Model For The Nonlinearities of Single Phase Transformer With Describing FunctionsNoor Hasnizam HanafiNo ratings yet
- Paper Cancelled Do Not Use For The Special Report: CIGRE 2016Document10 pagesPaper Cancelled Do Not Use For The Special Report: CIGRE 2016nasrunNo ratings yet
- Assignment No 1Document8 pagesAssignment No 1Debajit MalakarNo ratings yet
- Parametric Study of Rotor Slot Shape On A Cage Induction MotorDocument0 pagesParametric Study of Rotor Slot Shape On A Cage Induction MotorvishiwizardNo ratings yet
- Antenna and EM Modeling With MATLABDocument21 pagesAntenna and EM Modeling With MATLABNatasha SearsNo ratings yet
- Excitation of Isolated Three-Phase Induction Generator by A Single CapacitorDocument7 pagesExcitation of Isolated Three-Phase Induction Generator by A Single CapacitorEngrImranKhanNo ratings yet
- Slot WindingDocument22 pagesSlot WindingFitri Senpai75% (4)
- Determination of A Synchronous Generator Characteristics Via Finite Element AnalysisDocument6 pagesDetermination of A Synchronous Generator Characteristics Via Finite Element Analysisamin342No ratings yet
- Determining Rotor Leakage ReactanceDocument5 pagesDetermining Rotor Leakage ReactanceGaspar RodríguezNo ratings yet
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDocument4 pagesComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciNo ratings yet
- Design and Tests of A FaulttolerantDocument8 pagesDesign and Tests of A Faulttolerantrakeshee2007No ratings yet
- Instantaneous Magnetic Field Distribution Brushless Permanent Magnet DC Motors, Part I: Open-Circuit FieldDocument12 pagesInstantaneous Magnetic Field Distribution Brushless Permanent Magnet DC Motors, Part I: Open-Circuit FieldadilsondissoNo ratings yet
- Civil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBDocument253 pagesCivil Services - Electrical Main Paper I & II - 1992-2012 - 7.6MBAnika DixitNo ratings yet
- The Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables SeparationDocument38 pagesThe Analytical Approaches To Calculation of Electric Machines On The Basis of The Annular Domains Boundary Problems Solution by The Method of Fourier Variables Separationni60No ratings yet
- Improved Design For Reduction of Torque Ripple of Brushless DC MotorDocument4 pagesImproved Design For Reduction of Torque Ripple of Brushless DC MotorPhạm Văn TưởngNo ratings yet
- Generic Torque-Maximizing Design Methodology of Surface Permanent - Magnet Vernier MachineDocument8 pagesGeneric Torque-Maximizing Design Methodology of Surface Permanent - Magnet Vernier MachineJohn McLovenNo ratings yet
- Synchronous Machine Armature WindingsDocument32 pagesSynchronous Machine Armature Windingsiniyavan3119100% (1)
- ECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesDocument7 pagesECE 320 Energy Conversion and Power Electronics: Chapter ObjectivesHüseyin Murat PolaterNo ratings yet
- CRW 367-373Document7 pagesCRW 367-373amrrefkyNo ratings yet
- Vibration AnalysisDocument12 pagesVibration AnalysistheealokNo ratings yet
- Transformer Internal Fault Modeling in ATP: Abstract-An Important Aspect To Investigate When DesigningDocument6 pagesTransformer Internal Fault Modeling in ATP: Abstract-An Important Aspect To Investigate When DesigningAkash VermaNo ratings yet
- Simulation of The Magnetic Field of The VINCY CyclotronDocument5 pagesSimulation of The Magnetic Field of The VINCY CyclotronNguyễn Thành CôngNo ratings yet
- 21 Twenty OneDocument13 pages21 Twenty OneAhsanNo ratings yet
- FEM of Induction MotorDocument6 pagesFEM of Induction MotoromokhafeNo ratings yet
- Electrical Energy TechnologyDocument45 pagesElectrical Energy TechnologySandeep SinghNo ratings yet
- Project Report For Completion OF B. Tech. in Electrical EngineeringDocument57 pagesProject Report For Completion OF B. Tech. in Electrical EngineeringetasureshNo ratings yet
- Static Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodDocument5 pagesStatic Analysis of Mutually Coupled Switched Reluctance Motor With Finite Element MethodHeshaM MouhammeDNo ratings yet
- 01004017Document4 pages01004017pepe890305No ratings yet
- T.E Electrical QP2Document36 pagesT.E Electrical QP2Omkar SheteNo ratings yet
- Roebel Bar ModelDocument4 pagesRoebel Bar Modelemmanuelmanyau7862No ratings yet
- Signal Flow GraphDocument4 pagesSignal Flow GraphHimanshu AgrahariNo ratings yet
- Practical Induction 01Document5 pagesPractical Induction 01sathishNo ratings yet
- Rotating Electrical MachinesDocument33 pagesRotating Electrical Machinesgurunathan14No ratings yet
- A Novel Modeling and Control Method For Three-Phase ConvertersDocument6 pagesA Novel Modeling and Control Method For Three-Phase Convertersdhirajbharat20No ratings yet
- Line-Line Short Circuit of Synchronous Machine Illustration of Computer-Aided Machine AnalysisDocument8 pagesLine-Line Short Circuit of Synchronous Machine Illustration of Computer-Aided Machine Analysisdhirajbharat20No ratings yet
- A Unified Method For Modeling and Simulation of Three Phase Induction Motor DrivesDocument5 pagesA Unified Method For Modeling and Simulation of Three Phase Induction Motor Drivesdhirajbharat20No ratings yet
- Unified Theory of Torque Production in Switched and Synchronous Reluctance MotorsDocument6 pagesUnified Theory of Torque Production in Switched and Synchronous Reluctance Motorsdhirajbharat20No ratings yet
- Electric Drives Endterm 2014-15Document2 pagesElectric Drives Endterm 2014-15dhirajbharat20No ratings yet
- A History of Islamic Societies PDFDocument47 pagesA History of Islamic Societies PDFSimone SidasowNo ratings yet
- Catálogo Oreade MusicDocument13 pagesCatálogo Oreade MusicMartín RomanoNo ratings yet
- Eid Milad Un NabiDocument5 pagesEid Milad Un NabiShahid Khan100% (1)
- Demon The Fallen CoreDocument49 pagesDemon The Fallen CoreGolub87No ratings yet
- The Influence of Social Media On Crowd Behavior and The Operational EnvironmentDocument78 pagesThe Influence of Social Media On Crowd Behavior and The Operational EnvironmentangryTXNo ratings yet
- Visual Perception of Architecture Cultural Studies EssayDocument6 pagesVisual Perception of Architecture Cultural Studies EssayAureliaDewiNo ratings yet
- Segmentation, Targeting and Positioning For UniversitiesDocument14 pagesSegmentation, Targeting and Positioning For UniversitiesNazish SohailNo ratings yet
- (Hinduism) John M. Denton - Gems of Advaita Vedanta - Philosophy of Unity_ A Sanskrit Reader with Selected Significant Philosophical Excerpts from the Upanishads, Bhagavad Gita, Vivekacudamani and OthDocument144 pages(Hinduism) John M. Denton - Gems of Advaita Vedanta - Philosophy of Unity_ A Sanskrit Reader with Selected Significant Philosophical Excerpts from the Upanishads, Bhagavad Gita, Vivekacudamani and OthAlexandre RosasNo ratings yet
- Lesson Plan TemplateDocument1 pageLesson Plan TemplateNestor D. Mores, Jr.No ratings yet
- Research PaperDocument12 pagesResearch Papervinayaka1728No ratings yet
- Ral Presentations Provide An Essential Method of Demonstrating The Results of Your Learning or Research ProcessDocument3 pagesRal Presentations Provide An Essential Method of Demonstrating The Results of Your Learning or Research ProcessPhebieon MukwenhaNo ratings yet
- Truth MattersDocument537 pagesTruth MattersAlexisTorres75% (4)
- The Theory of Social and Economic OrganizationDocument2 pagesThe Theory of Social and Economic OrganizationMoussonNo ratings yet
- Agamben On Benjamin Messianic Time, Philosophy of HistoryDocument20 pagesAgamben On Benjamin Messianic Time, Philosophy of HistoryLam Chun YuNo ratings yet
- QuarksDocument243 pagesQuarksManfred Manfrito100% (1)
- Stress ManagementDocument19 pagesStress ManagementMarites Laroco CincoNo ratings yet
- Fictional Self-Consciousness in Robert Coover's Pricksongs and DescernísDocument15 pagesFictional Self-Consciousness in Robert Coover's Pricksongs and DescerníspalomaNo ratings yet
- What Is Meant by Charactyeristic Strength of ConcreteDocument4 pagesWhat Is Meant by Charactyeristic Strength of ConcretemmabeeNo ratings yet
- Destiny Analysis of Roger FedererDocument4 pagesDestiny Analysis of Roger Federerjerryking685No ratings yet
- Theme Based GRE WordlistDocument46 pagesTheme Based GRE WordlistDiwakar Sapkota100% (1)
- What Is Ethics?Document2 pagesWhat Is Ethics?Analiza PerezNo ratings yet
- Immigration and The Politics of SecurityDocument24 pagesImmigration and The Politics of SecurityIlker YilmazNo ratings yet
- HandoutDocument3 pagesHandoutramiii17No ratings yet
- A Cardinals Prayer Repository Newman1.PagesDocument2 pagesA Cardinals Prayer Repository Newman1.PagesCailein GillespieNo ratings yet
- Roughness Parameters: E.S. Gadelmawla, M.M. Koura, T.M.A. Maksoud, I.M. Elewa, H.H. SolimanDocument13 pagesRoughness Parameters: E.S. Gadelmawla, M.M. Koura, T.M.A. Maksoud, I.M. Elewa, H.H. SolimanPatrícia BarbosaNo ratings yet
- Five Elements of A StoryDocument5 pagesFive Elements of A StoryLisa B ArnoldNo ratings yet
- The Cambridge History of Libraries in Britain and Ireland, Volume 1 PDFDocument660 pagesThe Cambridge History of Libraries in Britain and Ireland, Volume 1 PDFBalan VioletaNo ratings yet
- EAS NotesDocument39 pagesEAS NotesSudhanshu HedaNo ratings yet
- 24 Books That Will Make You A More Well-Rounded Person - Features - Culture - The IndependentDocument42 pages24 Books That Will Make You A More Well-Rounded Person - Features - Culture - The IndependentNatalina Dass Tera LodatoNo ratings yet
- Sequenc Output Tracing For Clerk Pre (7 Sets)Document28 pagesSequenc Output Tracing For Clerk Pre (7 Sets)চিন্ময় ডেকাNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Chasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItFrom EverandChasing the Demon: A Secret History of the Quest for the Sound Barrier, and the Band of American Aces Who Conquered ItRating: 4 out of 5 stars4/5 (25)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Fuels, Furnaces and Refractories: International Series on Materials Science and TechnologyFrom EverandFuels, Furnaces and Refractories: International Series on Materials Science and TechnologyRating: 5 out of 5 stars5/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Post Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&AFrom EverandPost Weld Heat Treatment PWHT: Standards, Procedures, Applications, and Interview Q&ANo ratings yet
- Electrical (Generator and Electrical Plant): Modern Power Station PracticeFrom EverandElectrical (Generator and Electrical Plant): Modern Power Station PracticeRating: 4 out of 5 stars4/5 (9)
- Airplane Flying Handbook: FAA-H-8083-3C (2024)From EverandAirplane Flying Handbook: FAA-H-8083-3C (2024)Rating: 4 out of 5 stars4/5 (12)
- Gas Turbines: A Handbook of Air, Land and Sea ApplicationsFrom EverandGas Turbines: A Handbook of Air, Land and Sea ApplicationsRating: 4 out of 5 stars4/5 (9)
- Mechanical Vibrations and Condition MonitoringFrom EverandMechanical Vibrations and Condition MonitoringRating: 5 out of 5 stars5/5 (1)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Piping Design for Industrial Facilities: Understanding Codes and StandardsFrom EverandPiping Design for Industrial Facilities: Understanding Codes and StandardsRating: 4 out of 5 stars4/5 (1)
- Bulk Material Handling: Practical Guidance for Mechanical EngineersFrom EverandBulk Material Handling: Practical Guidance for Mechanical EngineersRating: 5 out of 5 stars5/5 (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet