You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- String Harmonics in Ravel's Orchestral WorksDocument97 pagesString Harmonics in Ravel's Orchestral WorksYork R83% (6)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Armas Calisterio Vs CalisterioDocument1 pageArmas Calisterio Vs CalisterioAngie DouglasNo ratings yet
- GDPR in ChartsDocument13 pagesGDPR in ChartsImageking0% (2)
- Arbitration AgreementsDocument20 pagesArbitration Agreementsmohd suhail siddiqui100% (2)
- 1956 11 15 Saucerian Bulletin Vol-1#5Document6 pages1956 11 15 Saucerian Bulletin Vol-1#5Keith S.No ratings yet
- Wamit V6.4: Diffraction-Radiation ComputationDocument66 pagesWamit V6.4: Diffraction-Radiation ComputationAnonymous JEe6LWPNo ratings yet
- Trig Cheat SheetDocument4 pagesTrig Cheat Sheetapi-284574585No ratings yet
- MATRIX EXPONENTIALDocument23 pagesMATRIX EXPONENTIALSerdar BilgeNo ratings yet
- Repeated EigenvaluesDocument16 pagesRepeated EigenvaluesSerdar BilgeNo ratings yet
- Repeated Eigenvalues 2Document17 pagesRepeated Eigenvalues 2Serdar BilgeNo ratings yet
- How To Add OpenMPI To CodeblocksDocument1 pageHow To Add OpenMPI To CodeblocksSerdar BilgeNo ratings yet
- OrthogonalityDocument1 pageOrthogonalitySerdar BilgeNo ratings yet
- Laplace Derivatives PDFDocument18 pagesLaplace Derivatives PDFSerdar BilgeNo ratings yet
- StaticDocument3 pagesStaticSerdar BilgeNo ratings yet
- MT 1 SolDocument4 pagesMT 1 SolSerdar BilgeNo ratings yet
- 1 Orthogonality of Cosine, Sine and Complex ExponentialsDocument5 pages1 Orthogonality of Cosine, Sine and Complex ExponentialsSerdar BilgeNo ratings yet
- Fluent 13.0 Workshop02-Airfoil PDFDocument67 pagesFluent 13.0 Workshop02-Airfoil PDFSerdar BilgeNo ratings yet
- CFD LearnDocument20 pagesCFD LearnAbed NaemNo ratings yet
- Estimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Document15 pagesEstimation of Wing Loading and Thrust Loading (Lectures 9 To 18)Serdar BilgeNo ratings yet
- Mechanical Intro 14.5 L02 BasicsDocument42 pagesMechanical Intro 14.5 L02 BasicsChandreshNo ratings yet
- Fluent Tutorial 1 - Fluid Flow and Heat Transfer in A Mixing ElbowDocument56 pagesFluent Tutorial 1 - Fluid Flow and Heat Transfer in A Mixing Elbowklausosho100% (1)
- Ode 11Document4 pagesOde 11Muhammad Saad ArshadNo ratings yet
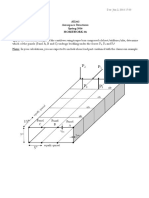
- HW03 Aerospace StructureDocument2 pagesHW03 Aerospace StructureSerdar BilgeNo ratings yet
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Document5 pagesLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNo ratings yet
- Ae362 - 2006 - hw1 Aerospace StructureDocument1 pageAe362 - 2006 - hw1 Aerospace StructureSerdar BilgeNo ratings yet
- Lecture 12: Solutions For Equations With Constants Coefficients (Ii)Document5 pagesLecture 12: Solutions For Equations With Constants Coefficients (Ii)Serdar BilgeNo ratings yet
- Fluent 13.0 Workshop02-Airfoil PDFDocument67 pagesFluent 13.0 Workshop02-Airfoil PDFSerdar BilgeNo ratings yet
- HW04 Aerospace StructureDocument2 pagesHW04 Aerospace StructureSerdar BilgeNo ratings yet
- HW02 Aerospace StructureDocument2 pagesHW02 Aerospace StructureSerdar BilgeNo ratings yet
- CAETraining (Fluid)Document129 pagesCAETraining (Fluid)andysarmientoNo ratings yet
- hw2 PDFDocument2 pageshw2 PDFSerdar BilgeNo ratings yet
- HW05 Aerospace StructureDocument2 pagesHW05 Aerospace StructureSerdar BilgeNo ratings yet
- HW06 Aerospace StructureDocument1 pageHW06 Aerospace StructureSerdar BilgeNo ratings yet
- Hw4 - 2016 Flight MechanicsDocument2 pagesHw4 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- Hw2 - 2016 Flight MechanicsDocument2 pagesHw2 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- Hw3 - 2016 Flight MechanicsDocument2 pagesHw3 - 2016 Flight MechanicsSerdar BilgeNo ratings yet
- Making Hand Sanitizer from Carambola FruitDocument5 pagesMaking Hand Sanitizer from Carambola FruitMary grace LlagasNo ratings yet
- Dendrinos, Multilingualism Language Policy in The EU TodayDocument20 pagesDendrinos, Multilingualism Language Policy in The EU Todayi.giommettiNo ratings yet
- Confidential: Turn in Exam Question PaperDocument20 pagesConfidential: Turn in Exam Question PaperRifat ManzoorNo ratings yet
- Fourth Edition Hungarian WordlistDocument12 pagesFourth Edition Hungarian WordlistMarton HorvathNo ratings yet
- Dr. Sun Chemistry Summary 2019 PDFDocument75 pagesDr. Sun Chemistry Summary 2019 PDFPranav ChatiNo ratings yet
- CSE 191 Homework Proposition LogicDocument5 pagesCSE 191 Homework Proposition LogicJyothi AnkumNo ratings yet
- Present Tense Review for Motorcycle RepairDocument2 pagesPresent Tense Review for Motorcycle RepairFaheemuddin Veterans50% (2)
- Concept AttainmentDocument1 pageConcept Attainmentapi-189549713No ratings yet
- Form 3: (See Rule 54 (12) ) Details of FamilyDocument1 pageForm 3: (See Rule 54 (12) ) Details of FamilySaikat SarkarNo ratings yet
- Advantage and Disadvantage Bode PlotDocument2 pagesAdvantage and Disadvantage Bode PlotJohan Sulaiman33% (3)
- ''Let All God's Angels Worship Him'' - Gordon AllanDocument8 pages''Let All God's Angels Worship Him'' - Gordon AllanRubem_CLNo ratings yet
- Practical 1Document3 pagesPractical 1Paulus DorlenNo ratings yet
- Reactor (CSTR)Document12 pagesReactor (CSTR)fatiehah93100% (1)
- Mughals in IndiaDocument4 pagesMughals in IndiaSalony RoongtaNo ratings yet
- Brah, Revisting IntersectionalityDocument12 pagesBrah, Revisting IntersectionalityhalimamuslimaNo ratings yet
- ARGUMENTS AGAINST AND IN FAVOR OF THE DEATH PENALTYDocument18 pagesARGUMENTS AGAINST AND IN FAVOR OF THE DEATH PENALTYRod Herrero PinoNo ratings yet
- New Technology To Reduce Yarn WastageDocument3 pagesNew Technology To Reduce Yarn WastageDwi Fitria ApriliantiNo ratings yet
- Development Through The Lifespan Test 1Document3 pagesDevelopment Through The Lifespan Test 1Alexandra CastroNo ratings yet
- Chong Co Thai Restaurant LocationsDocument19 pagesChong Co Thai Restaurant LocationsrajragavendraNo ratings yet
- Irish Chapter 6 Causes of DeathDocument8 pagesIrish Chapter 6 Causes of DeathIrish AlonzoNo ratings yet
- Exercise 2.3 (Solutions) : y X X XDocument6 pagesExercise 2.3 (Solutions) : y X X XFakhar AbbasNo ratings yet
- Marketing Analytics: Sem Iii Dr. Uzma HasanDocument192 pagesMarketing Analytics: Sem Iii Dr. Uzma HasanMitali MishraNo ratings yet
- Pan AfricanismDocument12 pagesPan AfricanismOscar MasindeNo ratings yet
- Guide Number 5 My City: You Will Learn To: Describe A Place Tell Where You in The CityDocument7 pagesGuide Number 5 My City: You Will Learn To: Describe A Place Tell Where You in The CityLUIS CUELLARNo ratings yet