You might also like
- A Case Study On PNG UNITECH CampusDocument8 pagesA Case Study On PNG UNITECH CampusRakeshconclaveNo ratings yet
- Segmentation of Welding Defects Using A Robust Algorithm: Miguel Carrasco and Domingo MeryDocument12 pagesSegmentation of Welding Defects Using A Robust Algorithm: Miguel Carrasco and Domingo MeryJegan SivaramanNo ratings yet
- Victim Detection With Infrared Camera in A "Rescue Robot": Saeed MoradiDocument7 pagesVictim Detection With Infrared Camera in A "Rescue Robot": Saeed MoradiKucIng HijAuNo ratings yet
- An Edge Detection Algorithm For Flame and Fire Alert SystemDocument3 pagesAn Edge Detection Algorithm For Flame and Fire Alert SystemAlí ArapaNo ratings yet
- Object Detection Algorithm Based On YOLODocument11 pagesObject Detection Algorithm Based On YOLOManny MerazinniNo ratings yet
- FluidDocument14 pagesFluidtastedifferNo ratings yet
- Two-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance ApplicationsDocument5 pagesTwo-Stage Segmentation For Detection of Suspicious Objects in Aerial and Long-Range Surveillance Applicationshrvoje80No ratings yet
- 3D Tracking and Classification System UsDocument24 pages3D Tracking and Classification System UsAlexandru MatasaruNo ratings yet
- Research Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingDocument7 pagesResearch Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingBilge MiniskerNo ratings yet
- Detection of Human Motion: Adopting Machine and Deep LearningDocument8 pagesDetection of Human Motion: Adopting Machine and Deep LearningPavithra iyerNo ratings yet
- Two-Stage Object Tracking Method Based On Kernel and Active ContourDocument5 pagesTwo-Stage Object Tracking Method Based On Kernel and Active ContourVasuhi SamyduraiNo ratings yet
- Color Feature Based Object Localization in Real Time ImplementationDocument7 pagesColor Feature Based Object Localization in Real Time ImplementationPoitu ErmawantiaNo ratings yet
- 2P5 0257 PDFDocument4 pages2P5 0257 PDFBruno Mian SilvaNo ratings yet
- Council For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesDocument6 pagesCouncil For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesmelakuNo ratings yet
- Early Fire Detection During Surveillance For Effective Disaster ManagementDocument4 pagesEarly Fire Detection During Surveillance For Effective Disaster ManagementPython JavaNo ratings yet
- Paper 7 - The Object Detection Based On Deep LearningDocument6 pagesPaper 7 - The Object Detection Based On Deep LearningabdullahNo ratings yet
- (Paper 5) Kira2012Document8 pages(Paper 5) Kira2012barnacleboy111111No ratings yet
- Meldahl Et Al 2001 SEG AbstractsDocument4 pagesMeldahl Et Al 2001 SEG AbstractsPatrick EllisNo ratings yet
- Moving Object DetectionDocument14 pagesMoving Object DetectionAmith Ram Reddy100% (1)
- I Jcs It 20120302103Document6 pagesI Jcs It 20120302103Chaitra MuralidharaNo ratings yet
- Human Detection Using Depth Information by KinectDocument8 pagesHuman Detection Using Depth Information by KinectMudita ChandraNo ratings yet
- Integral HogDocument14 pagesIntegral HogWayne WebbNo ratings yet
- (X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Document10 pages(X) Small Object Detection and Tracking - Algorithm, Analysis and Application (2005)Hira RasabNo ratings yet
- Smart CardsDocument39 pagesSmart CardsNandu ShriNo ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- Topics On Optical and Digital Image Processing Using Holography and Speckle TechniquesFrom EverandTopics On Optical and Digital Image Processing Using Holography and Speckle TechniquesNo ratings yet
- A Simple Image-Based Object Velocity Estimation Approach: Hung-Chi Chu Hao YangDocument6 pagesA Simple Image-Based Object Velocity Estimation Approach: Hung-Chi Chu Hao YangArthas8890No ratings yet
- Region Covariance Based Object Tracking Using Monte Carlo MethodDocument4 pagesRegion Covariance Based Object Tracking Using Monte Carlo MethodVasuhi SamyduraiNo ratings yet
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- (IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedDocument7 pages(IJET-V1I6P15) Authors: Sadhana Raut, Poonam Rohani, Sumera Shaikh, Tehesin Shikilkar, Mrs. G. J. ChhajedInternational Journal of Engineering and TechniquesNo ratings yet
- Calculating Distance To Tomato Using Stereo Vision For Automatic HarvestingDocument9 pagesCalculating Distance To Tomato Using Stereo Vision For Automatic HarvestingÁnh Phạm NgọcNo ratings yet
- Detection of Rooftop Regions in Rural Areas Using Support Vector MachineDocument5 pagesDetection of Rooftop Regions in Rural Areas Using Support Vector MachineijsretNo ratings yet
- Ground Penetrating Radar Image Preprocessing For Embedded Object in MediaDocument5 pagesGround Penetrating Radar Image Preprocessing For Embedded Object in MediaBabang SwissNo ratings yet
- Object Tracking With Self-Updating Tracking WindowDocument12 pagesObject Tracking With Self-Updating Tracking WindowSaeideh OraeiNo ratings yet
- Multi-Temporal Change Detection and Image Segmentation: Under Guidance Of: Dr. Anupam Agarwal SirDocument19 pagesMulti-Temporal Change Detection and Image Segmentation: Under Guidance Of: Dr. Anupam Agarwal SirAshish MeenaNo ratings yet
- Tempered Image DetectionDocument6 pagesTempered Image DetectionjkumardkNo ratings yet
- Entropy: 2D Tsallis Entropy For Image Segmentation Based On Modified Chaotic Bat AlgorithmDocument28 pagesEntropy: 2D Tsallis Entropy For Image Segmentation Based On Modified Chaotic Bat AlgorithmHojat RezvanNo ratings yet
- 2010 RAQRS UnmixingDocument6 pages2010 RAQRS Unmixingelahe92No ratings yet
- Quantitative Comparison of Algorithms For Tracking Single Fluorescent ParticlesDocument11 pagesQuantitative Comparison of Algorithms For Tracking Single Fluorescent Particles0106062007No ratings yet
- Object Distance MeasuremetnDocument22 pagesObject Distance MeasuremetnRavi ChanderNo ratings yet
- 06 Long Range Obstacle Detection From A Monocular CameraDocument3 pages06 Long Range Obstacle Detection From A Monocular CameraWilliamNo ratings yet
- International Journal of Engineering and Science Invention (IJESI)Document9 pagesInternational Journal of Engineering and Science Invention (IJESI)inventionjournalsNo ratings yet
- Anti-Personnel Mine Detection and Classification Using GPR ImageDocument4 pagesAnti-Personnel Mine Detection and Classification Using GPR ImageBHANDIWADMADHUMITANo ratings yet
- 3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron MicroscopeDocument24 pages3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron Microscopepurrab divakarNo ratings yet
- An Adaptive Morphological Filter For Moving Object SegmentationDocument8 pagesAn Adaptive Morphological Filter For Moving Object SegmentationFayadh AleneziNo ratings yet
- 1 s2.0 S0031320307002579 Main PDFDocument13 pages1 s2.0 S0031320307002579 Main PDFSonia R. BaldárragoNo ratings yet
- A Technique For Classification of High Resolution Satellite Images Using Object-Based SegmentationDocument12 pagesA Technique For Classification of High Resolution Satellite Images Using Object-Based SegmentationashishNo ratings yet
- Contours in Image ProcessingDocument3 pagesContours in Image ProcessingAadil ShNo ratings yet
- Tracking Multiple People For Video SurveillanceDocument7 pagesTracking Multiple People For Video SurveillanceImam FathurNo ratings yet
- An Approach To Improvise Canny Edge Detection Using Morphological FiltersDocument5 pagesAn Approach To Improvise Canny Edge Detection Using Morphological FiltersVijayakumarNo ratings yet
- Very Close Nadiral Images A Proposal For Quick Digging SurveyDocument6 pagesVery Close Nadiral Images A Proposal For Quick Digging Surveyerik costamagnaNo ratings yet
- Modified Color Based Edge Detection of Remote Sensing Images Using Fuzzy LogicDocument5 pagesModified Color Based Edge Detection of Remote Sensing Images Using Fuzzy LogicInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Benz Etal 2004 JPRSDocument20 pagesBenz Etal 2004 JPRSZigmārs RendenieksNo ratings yet
- Research of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemDocument10 pagesResearch of Multi-Object Detection and Tracking Using Machine Learning Based On Knowledge For Video Surveillance SystemBredino LolerNo ratings yet
- IJETR031551Document6 pagesIJETR031551erpublicationNo ratings yet
- Deep Convolutional Neural Networks For The Classification of Snapshot Mosaic Hyperspectral ImageryDocument6 pagesDeep Convolutional Neural Networks For The Classification of Snapshot Mosaic Hyperspectral ImageryRochelle LeeNo ratings yet
- A Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013Document5 pagesA Survey On Edge Detection Using Different Techniques: Volume 2, Issue 4, April 2013International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Crowd Event Recognition Using HOG TrackerDocument6 pagesCrowd Event Recognition Using HOG TrackerGauri NihongoNo ratings yet
- Sequencing & Control of Compressors: Industrial Refrigeration SystemsDocument11 pagesSequencing & Control of Compressors: Industrial Refrigeration Systemshvactrg1No ratings yet
- Introduction To Marketing StrategyDocument11 pagesIntroduction To Marketing Strategyhvactrg1No ratings yet
- Reindl 0218 02142019featureDocument8 pagesReindl 0218 02142019featurehvactrg1No ratings yet
- Emerson Compressor Refrigerant Oil List 93-11Document2 pagesEmerson Compressor Refrigerant Oil List 93-11hvactrg1No ratings yet
- The Hidden Daytime Price of Electricity: Technical FeatureDocument6 pagesThe Hidden Daytime Price of Electricity: Technical Featurehvactrg1No ratings yet
- Chapter 16-Dark Side of Consumer BehaviourDocument24 pagesChapter 16-Dark Side of Consumer Behaviourhvactrg1No ratings yet
- B2B Marketing - 4. Major Marketing Tools, MET InstituteDocument46 pagesB2B Marketing - 4. Major Marketing Tools, MET Institutehvactrg1No ratings yet
- Improving Operating Efficiency: of Packaged Air Conditioners & Heat PumpsDocument6 pagesImproving Operating Efficiency: of Packaged Air Conditioners & Heat Pumpshvactrg1No ratings yet
- Chapter 9-Customer Decision ProcessesDocument23 pagesChapter 9-Customer Decision Processeshvactrg1No ratings yet
- Chapter 11-Situational InfluencesDocument34 pagesChapter 11-Situational Influenceshvactrg1No ratings yet
- Final PPT Consumer BehaviourDocument38 pagesFinal PPT Consumer Behaviourhvactrg1No ratings yet
- 7) Consumer Belief and AttitudeDocument35 pages7) Consumer Belief and Attitudehvactrg1No ratings yet
- Chapter 9-Customer Decision ProcessesDocument23 pagesChapter 9-Customer Decision Processeshvactrg1No ratings yet
- Chapter 8-Persuasive CommunicationsDocument24 pagesChapter 8-Persuasive Communicationshvactrg1No ratings yet
- 1) Introduction To Consumer BehaviourDocument21 pages1) Introduction To Consumer Behaviourhvactrg1No ratings yet
- Chapter 4 Memory & LearningDocument32 pagesChapter 4 Memory & Learninghvactrg1100% (1)
- What Colour Perfume Bottle Attracts Your Eye The Most?: Clear 27% 17%Document12 pagesWhat Colour Perfume Bottle Attracts Your Eye The Most?: Clear 27% 17%hvactrg1No ratings yet
- HMMWV HawkeyeDocument2 pagesHMMWV HawkeyeVictor PileggiNo ratings yet
- Cameron BoyingtonDocument7 pagesCameron BoyingtonCameron BoyingtonNo ratings yet
- Parvez Faridi ResumeDocument2 pagesParvez Faridi ResumeNikhil BhattNo ratings yet
- Contoh ResumeDocument4 pagesContoh ResumeRosli Hadi BachokNo ratings yet
- TSE S.R.O. Karpatské Námestie 10A 831 06 Bratislava SlovakiaDocument2 pagesTSE S.R.O. Karpatské Námestie 10A 831 06 Bratislava SlovakiaIronko Pepe100% (1)
- Guide For System Center Hyper-V Management Pack For Windows Server 2012 R2Document9 pagesGuide For System Center Hyper-V Management Pack For Windows Server 2012 R2George RaduNo ratings yet
- ProfinetDocument4 pagesProfinetIulian CernatNo ratings yet
- GE Lighting Systems Indoor Lighting Designers Guide 1970Document56 pagesGE Lighting Systems Indoor Lighting Designers Guide 1970Alan Masters100% (1)
- ANITS College ProfileDocument5 pagesANITS College ProfilemurthygvrNo ratings yet
- Ghost Adventures S13e04 Reseda House of Evil HDTV x264-w4fDocument2 pagesGhost Adventures S13e04 Reseda House of Evil HDTV x264-w4fAnonymous wISY6CIf8No ratings yet
- Top Best Practices SSISDocument10 pagesTop Best Practices SSISYurkNo ratings yet
- Admin JobsDocument4 pagesAdmin JobsLakshmann ChettiarNo ratings yet
- Domyancic State OfficialDocument1 pageDomyancic State Officialapi-300790110No ratings yet
- Precast Lintels BeamsDocument4 pagesPrecast Lintels BeamsGabriel VieiraNo ratings yet
- ALT Annual Conference 2019 (#Altc) Programme - ProgrammeDocument12 pagesALT Annual Conference 2019 (#Altc) Programme - ProgrammeAdfsNo ratings yet
- .072" (1.8 MM) AWS D1.8:2016 March 01, 2022: Innershield® NR®-232Document1 page.072" (1.8 MM) AWS D1.8:2016 March 01, 2022: Innershield® NR®-232yousab creator2No ratings yet
- swd13 Card ListDocument1 pageswd13 Card ListDeschepper JohnNo ratings yet
- USFDADocument59 pagesUSFDADontYou KnowMeNo ratings yet
- Final Doc 2Document109 pagesFinal Doc 2Yes MayNo ratings yet
- PA Process: Thermal EngineeringDocument8 pagesPA Process: Thermal Engineeringlulis171No ratings yet
- Modern Digital and Analog Communications Systems - B P Lathi Solutions Manual - F4VNDocument156 pagesModern Digital and Analog Communications Systems - B P Lathi Solutions Manual - F4VNAbdullah Khan LodhiNo ratings yet
- Your Love Bass Tabs - The Outfield @Document3 pagesYour Love Bass Tabs - The Outfield @Álvaro Diogo S. TeixeiraNo ratings yet
- Supplementary Communication Sheet: (Document/Drawing Information) With Regard To Ring ForgingDocument2 pagesSupplementary Communication Sheet: (Document/Drawing Information) With Regard To Ring ForgingpkguptaqaqcNo ratings yet
- Unit-5 Wheels and TyresDocument31 pagesUnit-5 Wheels and TyresRahul Verma50% (2)
- A SWOT Analysis of Planning Support Systems: G.A. V Onk at G M A I L.C O MDocument23 pagesA SWOT Analysis of Planning Support Systems: G.A. V Onk at G M A I L.C O MDannyRamadhanNo ratings yet
- Julabo Corio CD-600fDocument4 pagesJulabo Corio CD-600fAlexander AndikaNo ratings yet
- Lean Case Study Part IDocument6 pagesLean Case Study Part IAnonymous QI9xEjrbplNo ratings yet
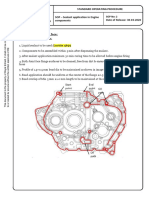
- SOP 2 - SOP For Sealant Application-1Document3 pagesSOP 2 - SOP For Sealant Application-1ꯗꯤꯛꯕꯤꯖꯣꯏ ꯂꯨꯋꯥꯡ ꯁꯣꯔꯥꯝNo ratings yet
- DUROFLEX2020 LimpiadorDocument8 pagesDUROFLEX2020 LimpiadorSolid works ArgentinaNo ratings yet
- Spindo Brochure - Oil & Gas IndustryDocument14 pagesSpindo Brochure - Oil & Gas Industrykiki widyaNo ratings yet