You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Augustin - A Contribution To The Design of Ribbed PlatesDocument10 pagesAugustin - A Contribution To The Design of Ribbed Platesm2auNo ratings yet
- 2008 Seadoo Shop ManualDocument555 pages2008 Seadoo Shop Manualanon_846090969100% (3)
- Experiment No.9 FrictionDocument13 pagesExperiment No.9 Frictionredhotchick84100% (7)
- CH 05Document14 pagesCH 05Abdul Shokor Abd TalibNo ratings yet
- Minishover Komatsu SK820-5E0Document260 pagesMinishover Komatsu SK820-5E0Jose A. Basanta H.100% (1)
- MMUP Electronics V1.7 - With Answers - PDF - Bipolar Junction Transistor - Electric MotorDocument193 pagesMMUP Electronics V1.7 - With Answers - PDF - Bipolar Junction Transistor - Electric MotorKanhaiya JhaNo ratings yet
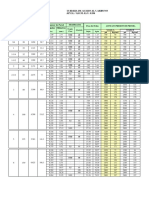
- Tablas Medidas Tubos de Acero API5L - ASTM A53 - A106Document6 pagesTablas Medidas Tubos de Acero API5L - ASTM A53 - A106Reinaldo AndaraNo ratings yet
- Problem 709 - Propped Beam With Spring Support: Stone Crusher Price ListDocument2 pagesProblem 709 - Propped Beam With Spring Support: Stone Crusher Price Listmeda012No ratings yet
- Techniques For Obstacle Avoidance in Mobile RoboticsDocument7 pagesTechniques For Obstacle Avoidance in Mobile RoboticsHarold Geovanny Flores CardenasNo ratings yet
- Enerpac E325e GB PDFDocument224 pagesEnerpac E325e GB PDFrudiNo ratings yet
- BlowerGB 2Document6 pagesBlowerGB 2Kiyarash BarmakizadehNo ratings yet
- S.P.Catalog TNT600I600GS-3 2020-Ver 200908Document97 pagesS.P.Catalog TNT600I600GS-3 2020-Ver 200908Rjay HayNo ratings yet
- BTD SyllabusDocument3 pagesBTD SyllabusSubuddhi DamodarNo ratings yet
- XTRACT Calculul Unui Perete de B.ADocument1 pageXTRACT Calculul Unui Perete de B.AHDu13No ratings yet
- "Don't Be A Normie, I Guess": Invisible MechanicsDocument30 pages"Don't Be A Normie, I Guess": Invisible Mechanicssameeryad72No ratings yet
- D2 Tool Steel - Heat Treatment Process PDFDocument3 pagesD2 Tool Steel - Heat Treatment Process PDFGayathriRajasekaranNo ratings yet
- TRF InspectionDocument15 pagesTRF InspectionSonny RaymundoNo ratings yet
- Strength of Materials 4th Edition by Pytel and Singer CompressDocument10 pagesStrength of Materials 4th Edition by Pytel and Singer CompressJohn Carlo EdejerNo ratings yet
- Lecture No: 10 (Lubrication in I.C.E) : 10.1 Function of Lubricating SystemDocument5 pagesLecture No: 10 (Lubrication in I.C.E) : 10.1 Function of Lubricating Systemمصطفى العباديNo ratings yet
- Mission Centrifugal PumpsDocument60 pagesMission Centrifugal PumpsWell Site Ranger100% (2)
- Design of A Lever Safety ValveDocument10 pagesDesign of A Lever Safety ValveAbhijith Sanker100% (1)
- Nissan 370Z: 3.7 PETROL Periodic MaintenanceDocument3 pagesNissan 370Z: 3.7 PETROL Periodic MaintenanceMichael KaneNo ratings yet
- ZL-7901A en V2.6b PDFDocument8 pagesZL-7901A en V2.6b PDFElio Jose Burgos Brieva100% (1)
- DWGB001Document10 pagesDWGB001LucaNo ratings yet
- Assignment-1 (2020011108)Document28 pagesAssignment-1 (2020011108)Atul KumarNo ratings yet
- 2600 Peeler Scrubber Eng No MarksDocument2 pages2600 Peeler Scrubber Eng No MarksWillian BarrosNo ratings yet
- Numerical Simulation of Inflow Performance For Perforated Horizontal WellsDocument7 pagesNumerical Simulation of Inflow Performance For Perforated Horizontal Wellssaholans2000No ratings yet
- Yanmar PumpDocument1 pageYanmar PumpHesham HusseinNo ratings yet
- R290 Quick Reference Card - Final-1Document4 pagesR290 Quick Reference Card - Final-1Sauptik SinhaNo ratings yet