You might also like
- Analysis of Rigid: For "Analysis Distributing Fixed-End Moments" by Hardy A.S.C.E., FigDocument1 pageAnalysis of Rigid: For "Analysis Distributing Fixed-End Moments" by Hardy A.S.C.E., FigjosNo ratings yet
- Slope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument8 pagesSlope-Deflection Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Two Cycle Moment DistributionDocument10 pagesTwo Cycle Moment Distributionsatoni12No ratings yet
- 5 - Moment Distribution Method PDFDocument15 pages5 - Moment Distribution Method PDFMohamad DuhokiNo ratings yet
- 1.11 Slope-Deflection Method of Analysis of Indeterminate StructuresDocument47 pages1.11 Slope-Deflection Method of Analysis of Indeterminate Structuresravi maskeNo ratings yet
- Moment Distribution MethodDocument19 pagesMoment Distribution MethodAsiyah Abdullahi ShituNo ratings yet
- Crystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsDocument22 pagesCrystal Dislocation: Calculation of Cross-Slip Parameters in F.C.C. CrystalsMary WorkNo ratings yet
- Chapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFDocument42 pagesChapter 12 Analysis of Indeterminate Beams and Frames by The Slope-Deflection Method PDFYirga BezabehNo ratings yet
- Unit 8 Moment Distribution Method: StructureDocument26 pagesUnit 8 Moment Distribution Method: StructureSUNIDHI VERMANo ratings yet
- Internal Forces, Beams, Shear and Bending Moment DiagramsDocument26 pagesInternal Forces, Beams, Shear and Bending Moment DiagramsArjoy Annalyn D. ArcillaNo ratings yet
- Chapter 5Document49 pagesChapter 5ISRAEL HAILUNo ratings yet
- Birla Vishvakarma Mahavidyalaya: TorsionDocument25 pagesBirla Vishvakarma Mahavidyalaya: TorsionPathan ShahidkhanNo ratings yet
- Moment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument7 pagesMoment-Distribution Method: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- Strength I Chapter SixDocument16 pagesStrength I Chapter SixAbel ErmiasNo ratings yet
- Unit-6 Theorem of Three MomentsDocument16 pagesUnit-6 Theorem of Three Momentskalpanaadhi100% (1)
- 2 Cycle Moment DistributionDocument10 pages2 Cycle Moment DistributionYang W OngNo ratings yet
- Slope Deflection MethodDocument21 pagesSlope Deflection MethodDivya Ramdev100% (1)
- 701 - Akassimali Structural Analysis 4th US&SI TXTBKDocument20 pages701 - Akassimali Structural Analysis 4th US&SI TXTBKEugenio DerbesNo ratings yet
- Chapter 7 Moment Distribution MethodDocument12 pagesChapter 7 Moment Distribution MethodSatyen Ramani100% (1)
- Axial Load LectureDocument21 pagesAxial Load LectureKajal PatelNo ratings yet
- Analysis of Statically Indeterminate StructuresDocument87 pagesAnalysis of Statically Indeterminate StructuresSabih Hashim AlzuhairyNo ratings yet
- Stiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofDocument2 pagesStiffness Method-Express Local (Member) Force-Displacement Relationships in Terms ofmujeebNo ratings yet
- M PhiDocument9 pagesM PhiVinayak PatilNo ratings yet
- CH 06Document48 pagesCH 06LeonardoMadeira11No ratings yet
- 02 - A60131 (Structural Analysis - II) - PPTDocument118 pages02 - A60131 (Structural Analysis - II) - PPTRennee Son BancudNo ratings yet
- Analysis of TrussDocument6 pagesAnalysis of TrussAbhisekh SahaNo ratings yet
- 1.2 Moment Distribution MethodDocument15 pages1.2 Moment Distribution MethodABAMELANo ratings yet
- 07 Elasticity Applications 04 Beam Theory PDFDocument28 pages07 Elasticity Applications 04 Beam Theory PDFJaved MANo ratings yet
- Influence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BDocument3 pagesInfluence Line: Clifford Jay C. Ansino Theory of Structure Ii 5-BSCE-BKhen CatayasNo ratings yet
- AF, DE: InflectionDocument1 pageAF, DE: InflectionjosNo ratings yet
- Conjugate-Beam MethodDocument20 pagesConjugate-Beam MethodJames Neo100% (1)
- Capitulo 6 - Torsion en Ejes Prismaticos PDFDocument42 pagesCapitulo 6 - Torsion en Ejes Prismaticos PDFCristian David BravoNo ratings yet
- m3l14 Lesson 14 The Slope-Deflection Method: An IntroductionDocument19 pagesm3l14 Lesson 14 The Slope-Deflection Method: An IntroductionVitor ValeNo ratings yet
- m3l16 Lesson 16 The Slope-Deflection Method: Frames Without SideswayDocument24 pagesm3l16 Lesson 16 The Slope-Deflection Method: Frames Without SideswayVitor ValeNo ratings yet
- Elasticity Applications 04 Beam TheoryDocument28 pagesElasticity Applications 04 Beam Theoryqaiserkhan001No ratings yet
- CE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force MethodDocument15 pagesCE 321 - MODULE 2 - Analysis of Statically Indeterminate Structures - Force Methodbsnow5325No ratings yet
- Lecture 5 - Slope Deflection Method For Beams PDFDocument66 pagesLecture 5 - Slope Deflection Method For Beams PDFzakheusNo ratings yet
- Chapter 6 Arch and CablesDocument34 pagesChapter 6 Arch and CablesGie UngonNo ratings yet
- m3l17 Lesson 17 The Slope-Deflection Method: Frames With SideswayDocument21 pagesm3l17 Lesson 17 The Slope-Deflection Method: Frames With SideswayVitor ValeNo ratings yet
- In This Course You Will Learn The Following: ObjectivesDocument46 pagesIn This Course You Will Learn The Following: ObjectivesGreyson ContrerasNo ratings yet
- Beam and FrameworkDocument5 pagesBeam and FrameworkfranckoNo ratings yet
- EP2CD4T2. PlanarMechanisms ForceTransforms MotionWRTRotatingFrames2Document41 pagesEP2CD4T2. PlanarMechanisms ForceTransforms MotionWRTRotatingFrames2Jason wonwonNo ratings yet
- GEG 113 SlidesDocument47 pagesGEG 113 SlidesOlajuwonNo ratings yet
- UntitledDocument9 pagesUntitledEdward NaanmaNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityParesh NimodiyaNo ratings yet
- Assignment Questions For All UnitsDocument10 pagesAssignment Questions For All UnitsPiyush BhandariNo ratings yet
- Slope Deflection Examples:: Fixed End MomentsDocument18 pagesSlope Deflection Examples:: Fixed End MomentsfransvladNo ratings yet
- CH6 PDFDocument45 pagesCH6 PDFAguero AgueroNo ratings yet
- Mec32-3 Shear Moment in Beams With Simple LoadingDocument22 pagesMec32-3 Shear Moment in Beams With Simple LoadingJhenalyn Del RosarioNo ratings yet
- Shear Force and Bending Moment - 1Document10 pagesShear Force and Bending Moment - 1Naveen UndrallaNo ratings yet
- Ch6 TorsionDocument12 pagesCh6 TorsionrkNo ratings yet
- Module 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsDocument11 pagesModule 5: Force Method - Introduction and Applications Lecture 1: Analysis of Statically Indeterminate BeamsVishal RastogiNo ratings yet
- Lec 29 PDFDocument11 pagesLec 29 PDFMohitNo ratings yet
- B. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 6: Deflection of Beams, ColumnsDocument2 pagesB. Tech. 1 Year (Civil) Solid Mechanics (CEN-102) Tutorial Sheet 6: Deflection of Beams, ColumnsKumar ShivamNo ratings yet
- Metode CrossDocument5 pagesMetode CrossRendo RendiNo ratings yet
- Chapter 5-MechanismDocument28 pagesChapter 5-MechanismDanielRaoNo ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- ScourDocument2 pagesScourSuman NakarmiNo ratings yet
- DCPDocument1 pageDCPSuman NakarmiNo ratings yet
- DCPDocument1 pageDCPSuman NakarmiNo ratings yet
- SeimicDocument1 pageSeimicSuman NakarmiNo ratings yet
- DCPDocument1 pageDCPSuman NakarmiNo ratings yet
- LiquefactDocument1 pageLiquefactSuman NakarmiNo ratings yet
- 15 CV 741Document48 pages15 CV 741Suman NakarmiNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentSuman NakarmiNo ratings yet
- Connection Design:: SB NB Ub Yb Mo MB MFDocument1 pageConnection Design:: SB NB Ub Yb Mo MB MFSuman NakarmiNo ratings yet
- Compression Member LSMDocument1 pageCompression Member LSMSuman NakarmiNo ratings yet
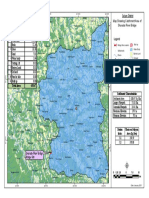
- Summary of Land Use Type in Catchment AreaDocument1 pageSummary of Land Use Type in Catchment AreaSuman NakarmiNo ratings yet
- Nor Rubber-Elastomeric Bearing PadsDocument13 pagesNor Rubber-Elastomeric Bearing PadsWILLWAYS CONSULTANCY INDIA PVT LTDNo ratings yet
- At Support: IRC 70R Wheel Vechicle Main Girder Response (ILD)Document2 pagesAt Support: IRC 70R Wheel Vechicle Main Girder Response (ILD)Suman NakarmiNo ratings yet
- 3 SummaryDocument1 page3 SummarySuman NakarmiNo ratings yet
- Ir 98 01Document200 pagesIr 98 01Suman NakarmiNo ratings yet
- StaadDocument3 pagesStaadSuman NakarmiNo ratings yet
- Defelction IRC Class ADocument1 pageDefelction IRC Class ASuman NakarmiNo ratings yet
- Nepal Road Standard 2070Document55 pagesNepal Road Standard 2070surendra_pangaNo ratings yet
- Assessment of A Railway Concrete Arch Bridge by Numerical Modelling and MeasurementsDocument10 pagesAssessment of A Railway Concrete Arch Bridge by Numerical Modelling and MeasurementsSuman NakarmiNo ratings yet
- ConnectionDocument1 pageConnectionSuman NakarmiNo ratings yet
- TestDocument1 pageTestSuman NakarmiNo ratings yet
- Deflection and Rotation Due To Dead Load: Mid Span SupportDocument3 pagesDeflection and Rotation Due To Dead Load: Mid Span SupportSuman NakarmiNo ratings yet
- RateDocument1 pageRateSuman NakarmiNo ratings yet
- Pre Stress Section Design RevisedDocument2 pagesPre Stress Section Design RevisedSuman NakarmiNo ratings yet
- Nepal Road Standard 2070Document55 pagesNepal Road Standard 2070surendra_pangaNo ratings yet
- NewDocument1 pageNewSuman NakarmiNo ratings yet
- ReactDocument2 pagesReactSuman NakarmiNo ratings yet
- Ir 98 01Document200 pagesIr 98 01Suman NakarmiNo ratings yet
- PileDocument5 pagesPileSuman NakarmiNo ratings yet
- Final Report Experiment 7: Preparation and Characterization of HydrocarbonsDocument6 pagesFinal Report Experiment 7: Preparation and Characterization of HydrocarbonsJhei Mesina AfableNo ratings yet
- Decl Conf XPS30Document1 pageDecl Conf XPS30iriniNo ratings yet
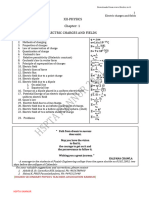
- Hsslive-HSPTA-2.1 Electric Charges and Fields 2021-FDocument17 pagesHsslive-HSPTA-2.1 Electric Charges and Fields 2021-FBhagyaNo ratings yet
- Fundamentals of Interface Fracture MechanicsDocument10 pagesFundamentals of Interface Fracture MechanicsNipun DahraNo ratings yet
- Magnetic Potential Energy of A Linear Magnetic Track GunDocument14 pagesMagnetic Potential Energy of A Linear Magnetic Track GunNick CanningNo ratings yet
- Lecture Notes # 5: Dynamics of Rigid BodiesDocument13 pagesLecture Notes # 5: Dynamics of Rigid BodiesmymeeepNo ratings yet
- Optional Area Examination Analytical ChemistryDocument4 pagesOptional Area Examination Analytical ChemistryMohamed DahmaneNo ratings yet
- 4 - Unit Operations Laboratory ManualDocument63 pages4 - Unit Operations Laboratory Manualcgjp120391100% (3)
- SRB ReviewerDocument17 pagesSRB ReviewerBriones JastineNo ratings yet
- L2 EH2741 Power System BasicsDocument31 pagesL2 EH2741 Power System BasicsvivekanandaNo ratings yet
- Induction and Deduction: The Role of Induction and Deduction in The Validity of Scientific TheoryDocument12 pagesInduction and Deduction: The Role of Induction and Deduction in The Validity of Scientific TheoryBodhinanda ChandraNo ratings yet
- Morse MP Ingard Uk Theoretical AcousticsDocument933 pagesMorse MP Ingard Uk Theoretical AcousticsJosef Grodinsky100% (4)
- Self Assessment Questions OneDocument3 pagesSelf Assessment Questions OneTendus StephanNo ratings yet
- Maths SyllabusDocument3 pagesMaths SyllabusSabari BalaNo ratings yet
- Module 6: Electromagnetism Topic 1.1: Charged Particles in Electric/Magnetic FieldsDocument13 pagesModule 6: Electromagnetism Topic 1.1: Charged Particles in Electric/Magnetic FieldsReacher ElliotNo ratings yet
- TitaniumDocument24 pagesTitaniumMert KoçNo ratings yet
- Triple Beam BalanceDocument4 pagesTriple Beam Balanceapi-384346623No ratings yet
- What-Is-Mass (History)Document19 pagesWhat-Is-Mass (History)Sains Sekolah RendahNo ratings yet
- Petroleum Refining AssignmentDocument4 pagesPetroleum Refining Assignment伟铭No ratings yet
- Wavelength Tunable LED: Created in COMSOL Multiphysics 5.4Document6 pagesWavelength Tunable LED: Created in COMSOL Multiphysics 5.4David PinoNo ratings yet
- 2015-16 Class Xi Chemistry Study Material PDFDocument239 pages2015-16 Class Xi Chemistry Study Material PDFhiralalnhpcNo ratings yet
- Unit I Semiconductor DevicesDocument15 pagesUnit I Semiconductor DeviceskannanchammyNo ratings yet
- Dark Matter PDFDocument30 pagesDark Matter PDFVed NarsekarNo ratings yet
- Building Utilities SwitchesDocument59 pagesBuilding Utilities SwitchesMeryll Mae Bicol100% (1)
- Structural Elements in FLAC 3DDocument186 pagesStructural Elements in FLAC 3DSergio Andres ZerreitugNo ratings yet
- Nav Gyro Error by Celestial 1Document13 pagesNav Gyro Error by Celestial 1dpc876No ratings yet
- Phet Investigating The Parameters of Circular OrbitsDocument5 pagesPhet Investigating The Parameters of Circular OrbitsAdnan Ismail50% (22)
- Test For XIDocument5 pagesTest For XIKamran AliNo ratings yet
- Gate Chemical 2008Document12 pagesGate Chemical 2008Adil RiazNo ratings yet
- Fundamentals Selection Installation and Maintenance of Gearboxes Gear Drives Part 1Document61 pagesFundamentals Selection Installation and Maintenance of Gearboxes Gear Drives Part 1BorisNo ratings yet