You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Breast UltrasoundDocument57 pagesBreast UltrasoundYoungFanjiensNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Black Box Testing TechniquesDocument28 pagesBlack Box Testing TechniquesAshish YadavNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
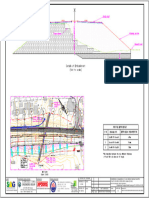
- Sag 011 5267 DSN PW em 24.380 24.520 Ol SG2 100 01Document1 pageSag 011 5267 DSN PW em 24.380 24.520 Ol SG2 100 01Sanjay SwamiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- I Found The PathDocument72 pagesI Found The PathmasterrkNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Ketogenic Diet PresentationDocument64 pagesKetogenic Diet Presentationstefanie_561186832100% (2)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Solving Simultaneous Equations: Elimination Method Substitution MethodDocument22 pagesSolving Simultaneous Equations: Elimination Method Substitution MethodAxel & Alex IndoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Mastek Jul-Sep 2021Document51 pagesMastek Jul-Sep 2021Aditya0% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Notatek PL Present Simple A Present ContinuousDocument2 pagesNotatek PL Present Simple A Present ContinuousSlawomir WalczakNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Minimum Oil Circuit BreakerDocument4 pagesMinimum Oil Circuit BreakergshdavidNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Dell E6410 Error CodesDocument3 pagesDell E6410 Error CodesHeather A Logan100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Changes in Ownership Interest: Multiple ChoiceDocument19 pagesChanges in Ownership Interest: Multiple ChoicepompomNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- South Sector: Ig/Ss HQ ChennaiDocument11 pagesSouth Sector: Ig/Ss HQ Chennaisohalsingh1No ratings yet
- 3 HACCP Overview Training DemoDocument17 pages3 HACCP Overview Training Demoammy_75No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Simple Linear Programming Model: Joel S. CasibangDocument49 pagesSimple Linear Programming Model: Joel S. CasibangMichelle Dela CruzNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- R2900G JLK01211 ConfigurationDocument2 pagesR2900G JLK01211 Configurationjc villongcoNo ratings yet
- Temic Vs Temic UnionDocument3 pagesTemic Vs Temic UnionJ CaparasNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- AMMONIUM SULPHATE, TECHNICAL SpecificationDocument10 pagesAMMONIUM SULPHATE, TECHNICAL Specificationbabji dudekulaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Abc Stock AcquisitionDocument13 pagesAbc Stock AcquisitionMary Joy AlbandiaNo ratings yet
- Technical Data: Rotax Kart Type R1, Model 2002Document2 pagesTechnical Data: Rotax Kart Type R1, Model 2002Gallego VilaNo ratings yet
- J. R. D. Tata - Google SearchDocument5 pagesJ. R. D. Tata - Google SearchoffyNo ratings yet
- RF Module Users Guide - COMSOLDocument206 pagesRF Module Users Guide - COMSOLAhmad Usman100% (1)
- Chapter 1Document43 pagesChapter 1arun neupaneNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 13.8v Power Supply PS HighCurrentDocument17 pages13.8v Power Supply PS HighCurrentMadumathi BulumullaNo ratings yet
- Cat and Dog Classification Using CNN: Project ObjectiveDocument7 pagesCat and Dog Classification Using CNN: Project Objectivecoursera detailsNo ratings yet
- Subject Orientation AP10Document26 pagesSubject Orientation AP10mikejones cotejoNo ratings yet
- Air - Def 1 Defense TechsDocument106 pagesAir - Def 1 Defense Techsdefensetechs100% (1)
- WHLP12 Quarter 1Document8 pagesWHLP12 Quarter 1rhaineNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- T&D FinalDocument69 pagesT&D Finalthella deva prasadNo ratings yet
- Oracle9i Database - Advanced Backup and Recovery Using RMAN - Student GuideDocument328 pagesOracle9i Database - Advanced Backup and Recovery Using RMAN - Student Guideacsabo_14521769No ratings yet
- Clinical InterviewDocument29 pagesClinical InterviewVasundhara RanaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)