You might also like
- Ejemplo Método BisecciónDocument2 pagesEjemplo Método BisecciónAngel AndoneguiNo ratings yet
- SolucionarioDocument362 pagesSolucionarioStephen Jones88% (8)
- Web Solucionario MC Graw Hill. Bloque FísicaDocument101 pagesWeb Solucionario MC Graw Hill. Bloque FísicaGuillermo Valladares DelgadoNo ratings yet
- Prefijos NegativosDocument2 pagesPrefijos NegativosStephen Jones100% (1)
- Ingenieria QuimicaDocument151 pagesIngenieria QuimicaStephen JonesNo ratings yet
- Módulo 3 PseudocódigoDocument5 pagesMódulo 3 PseudocódigoKatty CalderonNo ratings yet
- Dialnet IniciacionALosMetodosNumericos 489813Document150 pagesDialnet IniciacionALosMetodosNumericos 489813Gusta GaboayooNo ratings yet
- Key To Bachillerato 1 - Units 1 - 2Document3 pagesKey To Bachillerato 1 - Units 1 - 2beita3325% (12)
- Algebra Lineal Sustentación Trabajo ColaborativoDocument6 pagesAlgebra Lineal Sustentación Trabajo ColaborativoHAROLD DANIEL DUQUE CASTANEDA100% (2)
- 04 Interseccion de Planos-1Document0 pages04 Interseccion de Planos-1chapinnnNo ratings yet
- Tangencias Por Potencia e Inversión 2º BachDocument88 pagesTangencias Por Potencia e Inversión 2º BachStephen JonesNo ratings yet
- Inversión PDFDocument23 pagesInversión PDFpadulin_colorao100% (1)
- Diedrico EjerciciosDocument13 pagesDiedrico EjerciciosStephen JonesNo ratings yet
- 05 Interseccion de Rectas y PlanosDocument0 pages05 Interseccion de Rectas y PlanoskerlypazNo ratings yet
- Pronunciación InglesaDocument2 pagesPronunciación InglesaElizabethSantiagoTorresNo ratings yet
- Horario ClaseDocument1 pageHorario ClaseStephen JonesNo ratings yet
- Formación de PalabrasDocument2 pagesFormación de PalabrasStephen JonesNo ratings yet
- Tangencias EditexDocument38 pagesTangencias EditexStephen Jones100% (3)
- 04 Interseccion de Planos-1Document0 pages04 Interseccion de Planos-1chapinnnNo ratings yet
- Exam Tips For Pau SpanishDocument24 pagesExam Tips For Pau SpanishCarmen García Illán100% (1)
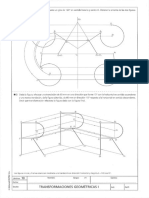
- Transformaciones GeometricasDocument8 pagesTransformaciones GeometricasStephen JonesNo ratings yet
- Curso de Inglés Vaughan - El Mundo - Libro 14Document78 pagesCurso de Inglés Vaughan - El Mundo - Libro 14Stephen Jones100% (1)
- E Going To and The Present ProgressiveDocument1 pageE Going To and The Present ProgressiveStephen JonesNo ratings yet
- Curso de Inglés Vaughan - El Mundo - Libro 15Document82 pagesCurso de Inglés Vaughan - El Mundo - Libro 15Stephen Jones100% (1)
- Apuntesdegramaticainglesa2 110108071707 Phpapp02Document39 pagesApuntesdegramaticainglesa2 110108071707 Phpapp02Stephen JonesNo ratings yet
- Apuntesdegramaticainglesa2 110108071707 Phpapp02Document39 pagesApuntesdegramaticainglesa2 110108071707 Phpapp02Stephen JonesNo ratings yet
- Worksheet One.Document1 pageWorksheet One.Stephen JonesNo ratings yet
- Tema 4. Los Átomos PDFDocument32 pagesTema 4. Los Átomos PDFStephen JonesNo ratings yet
- Dimensionado de Una Instalación de Captación y Separación de Partículas PDFDocument11 pagesDimensionado de Una Instalación de Captación y Separación de Partículas PDFStephen JonesNo ratings yet
- Grammar. 11. Can PDFDocument2 pagesGrammar. 11. Can PDFStephen JonesNo ratings yet
- Tema 4. Los Átomos PDFDocument32 pagesTema 4. Los Átomos PDFStephen JonesNo ratings yet
- Dimensionado de Una Instalación de Captación y Separación de Partículas PDFDocument11 pagesDimensionado de Una Instalación de Captación y Separación de Partículas PDFStephen JonesNo ratings yet
- Explicacion Golpe de ArieteDocument18 pagesExplicacion Golpe de ArieteMartín ObredorNo ratings yet
- Digitales 2Document8 pagesDigitales 2Sanchez Salazar ErnestoNo ratings yet
- Matematicas Aplicadas Act 8Document4 pagesMatematicas Aplicadas Act 8Angela MartínezNo ratings yet
- 0002-Distancial Final Plantilla ResueltoDocument9 pages0002-Distancial Final Plantilla ResueltoLizy RodriguezNo ratings yet
- Funcionamiento PerceptrónDocument6 pagesFuncionamiento PerceptrónFernandoNo ratings yet
- CPMDocument13 pagesCPMDiana Carolina100% (1)
- Observadores de Orden ReducidoDocument24 pagesObservadores de Orden ReducidoCarlos LLivisacaNo ratings yet
- Prueba Chi CuadradoDocument2 pagesPrueba Chi CuadradoalguzduxtanNo ratings yet
- Examen - Actividad de Puntos Evaluables - Escenario 6Document4 pagesExamen - Actividad de Puntos Evaluables - Escenario 6Alexander Cacais0% (1)
- 1 Método de EulerDocument17 pages1 Método de EulerKarina Escalante Zegarra0% (1)
- 7.1 Ejercicio Resuelto de Viga - RIHGDocument13 pages7.1 Ejercicio Resuelto de Viga - RIHGYuranny CorderoNo ratings yet
- Leyes de Los Gases IdealesDocument14 pagesLeyes de Los Gases IdealesAngela Patricia Ruiz AragonNo ratings yet
- 1 - Programación Dinámica PDFDocument25 pages1 - Programación Dinámica PDFVíctor ColomoNo ratings yet
- PC 1 AlgoritmosDocument1 pagePC 1 AlgoritmosREnac CANreNo ratings yet
- F-Frank Luis Quispe Llanos - 48793 - 0Document5 pagesF-Frank Luis Quispe Llanos - 48793 - 0Lia Liz LLanos VargasNo ratings yet
- Metodo M o de Penalización-1Document5 pagesMetodo M o de Penalización-1kevinlolololoNo ratings yet
- Defina Los Siguientes ConceptosDocument3 pagesDefina Los Siguientes ConceptosRem MendNo ratings yet
- 12 Gramaticas Recursivas y No FactorizadasDocument14 pages12 Gramaticas Recursivas y No FactorizadasFelipe LS100% (1)
- Modelos Estadisticos y Financieros en La Gestión de Riesgo de CréditDocument72 pagesModelos Estadisticos y Financieros en La Gestión de Riesgo de CréditOperaciones Edpyme AlternativaNo ratings yet
- Analisis NumericoDocument8 pagesAnalisis NumericoCarlos Andres Rojas BuendiaNo ratings yet
- Capítulo 06 Mapas de Karnaugh y El Método de Quine McCluskey - 1Document27 pagesCapítulo 06 Mapas de Karnaugh y El Método de Quine McCluskey - 1Octavio AvendañoNo ratings yet
- 2.5 Criterio de Estabilidad De: ROUT-HURWIT: Ecuación 2.5.1Document9 pages2.5 Criterio de Estabilidad De: ROUT-HURWIT: Ecuación 2.5.1López SantiagoNo ratings yet
- Tema 7. Estimación Puntual y Por IntervalosDocument15 pagesTema 7. Estimación Puntual y Por Intervalosdaniel ceron ramirezNo ratings yet
- Método Simplex Dual PDFDocument2 pagesMétodo Simplex Dual PDFBETONo ratings yet
- Actividad #2 Función de Transferencia de Pulso de Sistemas de Control Discreto y Transformada Z ModificadaDocument20 pagesActividad #2 Función de Transferencia de Pulso de Sistemas de Control Discreto y Transformada Z ModificadaYeraldine Rodríguez WilletNo ratings yet
- Pruebas 2018BDocument2 pagesPruebas 2018BgesdvgsNo ratings yet
- Dam M09 T05 PDFDocument32 pagesDam M09 T05 PDFinmianaNo ratings yet
- S15 Planeamiento Ej SoluciónDocument5 pagesS15 Planeamiento Ej SoluciónNailea Shantal HUAHUACONDO MALQUINo ratings yet