You might also like
- Screenshot 2021-11-05 at 1.21.59 PMDocument19 pagesScreenshot 2021-11-05 at 1.21.59 PMDevsoth NareshNo ratings yet
- Buy Black Sneakers Online Sneakers For Men UrbanshoreDocument1 pageBuy Black Sneakers Online Sneakers For Men UrbanshoreDevsoth NareshNo ratings yet
- TrtrereDocument2 pagesTrtrereDevsoth NareshNo ratings yet
- Nhess 9 459 2009Document9 pagesNhess 9 459 2009Devsoth NareshNo ratings yet
- Failures in Pavements - JNTU COE HyderabadDocument40 pagesFailures in Pavements - JNTU COE HyderabadDevsoth NareshNo ratings yet
- Notes SheetDocument2 pagesNotes SheetDevsoth NareshNo ratings yet
- Act BillsDocument2 pagesAct BillsDevsoth NareshNo ratings yet
- Paper 132Document8 pagesPaper 132Devsoth NareshNo ratings yet
- File: UC - No.G1/ /2018-19: Submitted SirDocument1 pageFile: UC - No.G1/ /2018-19: Submitted SirDevsoth NareshNo ratings yet
- 03 Jul 201502071915Document5 pages03 Jul 201502071915Devsoth NareshNo ratings yet
- Soil NailingDocument2 pagesSoil NailingDevsoth NareshNo ratings yet
- The Robotic RevolutionDocument26 pagesThe Robotic RevolutionDevsoth NareshNo ratings yet
- Ground Improvement TechniquesDocument17 pagesGround Improvement Techniquesjs kalyana rama100% (1)
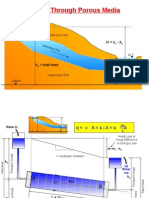
- Seepage Through Porous Media: H Total HeadDocument20 pagesSeepage Through Porous Media: H Total HeadDevsoth NareshNo ratings yet
- DAMS 1unit Part2Document53 pagesDAMS 1unit Part2Devsoth NareshNo ratings yet
- Soil Mechanics Lab ManualDocument22 pagesSoil Mechanics Lab ManualDevsoth NareshNo ratings yet
- Design of Dams - Seepage ControlDocument55 pagesDesign of Dams - Seepage ControlDevsoth NareshNo ratings yet
- Opx 1 TJTPDocument8 pagesOpx 1 TJTPDevsoth NareshNo ratings yet
- A Case Study On The Performance of Embankments On Treated Soft Ground (2003) - Thesis (69 (Document69 pagesA Case Study On The Performance of Embankments On Treated Soft Ground (2003) - Thesis (69 (Julio Humberto Díaz RondánNo ratings yet
- Expansive Soils 20-02-2015Document49 pagesExpansive Soils 20-02-2015Devsoth NareshNo ratings yet
- DetailsDocument1 pageDetailsDevsoth NareshNo ratings yet
- Fci - Admit CardDocument3 pagesFci - Admit CardDevsoth Naresh100% (1)
- 2015fin MS65Document9 pages2015fin MS65Devsoth NareshNo ratings yet
- Case History of GEEDocument2 pagesCase History of GEEDevsoth NareshNo ratings yet
- 1-MIS, DeO, Messanger CRP,, Attendance of April and May 1.6.15Document8 pages1-MIS, DeO, Messanger CRP,, Attendance of April and May 1.6.15Devsoth NareshNo ratings yet
- 6 TH-53Document6 pages6 TH-53Devsoth NareshNo ratings yet
- GT 1Document8 pagesGT 1Devsoth NareshNo ratings yet
- Lecture 01Document17 pagesLecture 01Devsoth NareshNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Noam Text ליגר טסקט םעֹנDocument20 pagesNoam Text ליגר טסקט םעֹנGemma gladeNo ratings yet
- Probability Sampling Guide for Health ResearchDocument5 pagesProbability Sampling Guide for Health ResearchNicole AleriaNo ratings yet
- 6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsDocument7 pages6.1 Calculation of Deflection: 1) Short Term Deflection at Transfer 2) Long Term Deflection Under Service LoadsAllyson DulfoNo ratings yet
- Embraer ePerf Tablet App Calculates Takeoff & Landing Performance OfflineDocument8 pagesEmbraer ePerf Tablet App Calculates Takeoff & Landing Performance OfflinewilmerNo ratings yet
- Even Sem - Odd Sem - MD MS - MA, MSC, MCom - Previous - Final Main Exam Result 2021 - Mahatma Jyotiba Phule Rohilkhand UniversityDocument2 pagesEven Sem - Odd Sem - MD MS - MA, MSC, MCom - Previous - Final Main Exam Result 2021 - Mahatma Jyotiba Phule Rohilkhand UniversityprashantNo ratings yet
- EEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsDocument5 pagesEEG Signal Classification Using K-Means and Fuzzy C Means Clustering MethodsIJSTENo ratings yet
- Mastering EES Chapter1Document66 pagesMastering EES Chapter1mianvaherNo ratings yet
- Murat Kenedy: Bu Içerik Tarafından HazırlanmıştırDocument2 pagesMurat Kenedy: Bu Içerik Tarafından HazırlanmıştırChatorg. orgNo ratings yet
- Lesson Plan in Science 10 2nd QuarterDocument5 pagesLesson Plan in Science 10 2nd QuarterJenevev81% (21)
- Manual de Diagnostico D3E PDFDocument72 pagesManual de Diagnostico D3E PDFJosé Luis Contreras Calderón100% (3)
- Karl Marx AssignmentDocument1 pageKarl Marx Assignmenthanunarabella1No ratings yet
- A Data-Based Reliability Analysis of ESPDocument19 pagesA Data-Based Reliability Analysis of ESPfunwithcubingNo ratings yet
- (Acta Universitatis Gothoburgensis) Tryggve Göransson - Albinus, Alcinous, Arius Didymus (1995) PDFDocument128 pages(Acta Universitatis Gothoburgensis) Tryggve Göransson - Albinus, Alcinous, Arius Didymus (1995) PDFMarcos EstevamNo ratings yet
- Preparation for the entrance examDocument4 pagesPreparation for the entrance examMinh ChâuNo ratings yet
- "Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureDocument29 pages"Roughness": Filtering and Filtering and Filtering and Filtering and Surface Surface Texture TextureZouhair BenmabroukNo ratings yet
- Mapping of Significant Natural Resources: Category: Bodies of WaterDocument3 pagesMapping of Significant Natural Resources: Category: Bodies of WaterDei HernandezNo ratings yet
- Artificial MusclesDocument8 pagesArtificial MusclespinnakapentiumNo ratings yet
- Miners RuleDocument2 pagesMiners Ruleபிரபாகரன் ஆறுமுகம்No ratings yet
- Unit 1 Question AnswerDocument5 pagesUnit 1 Question AnswerSubhankar BiswalNo ratings yet
- Module 1 SIMPLE INTERESTDocument15 pagesModule 1 SIMPLE INTERESTElle Villanueva VlogNo ratings yet
- Eco 201Document23 pagesEco 201Tâm TítNo ratings yet
- Multiple Choice Bubble Sheet Template Customize This WordDocument3 pagesMultiple Choice Bubble Sheet Template Customize This WordAl Bin0% (1)
- ATT III - 13. Prevent, Control and Fight Fires On BoardDocument9 pagesATT III - 13. Prevent, Control and Fight Fires On BoardPak WeNo ratings yet
- Create Login Application In Excel Macro Using Visual BasicDocument16 pagesCreate Login Application In Excel Macro Using Visual Basicfranklaer-2No ratings yet
- Bill of Quantity: Baner Lifespaces LLPDocument6 pagesBill of Quantity: Baner Lifespaces LLPSales AlufacadesNo ratings yet
- Container Stuffing Advice for Reducing Cargo DamageDocument16 pagesContainer Stuffing Advice for Reducing Cargo DamageBerkay TürkNo ratings yet
- Mastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesDocument48 pagesMastercam 8.1 Beta 4: New Verification Engine in Beta 4! Sub-Programs Post ChangesSaul Saldana LoyaNo ratings yet
- Industrial Applications of Olefin MetathesisDocument7 pagesIndustrial Applications of Olefin Metathesisdogmanstar100% (1)
- A. Soriano Corporation 2009 Annual Stockholders Meeting Notice and AgendaDocument47 pagesA. Soriano Corporation 2009 Annual Stockholders Meeting Notice and AgendaGabriel uyNo ratings yet
- High Current Transistor SpecsDocument5 pagesHigh Current Transistor SpecsamernasserNo ratings yet