You might also like
- Summer TrainingDocument22 pagesSummer TrainingAkash Sahu100% (1)
- Survey Camp 15 Control PointsDocument1 pageSurvey Camp 15 Control PointsAkash SahuNo ratings yet
- Assignment On EarthquakeDocument14 pagesAssignment On EarthquakeAkash Sahu100% (2)
- Lucknow MetroDocument581 pagesLucknow MetroAkash SahuNo ratings yet
- Spot SpeedDocument26 pagesSpot SpeedChetan PatelNo ratings yet
- High Volume SamplerDocument1 pageHigh Volume SamplerAkash SahuNo ratings yet
- Determine Soil Density Using Core Cutter Method (IS 27270 Part-29Document2 pagesDetermine Soil Density Using Core Cutter Method (IS 27270 Part-29Akash SahuNo ratings yet
- Determination of Field Density of Soil by Sand Replacement MethodDocument3 pagesDetermination of Field Density of Soil by Sand Replacement MethodAkash SahuNo ratings yet
- Determination of TurbidityDocument12 pagesDetermination of TurbidityAkash SahuNo ratings yet
- Liquid Limit Test of Soil Using Casagrande Apparatus PDFDocument2 pagesLiquid Limit Test of Soil Using Casagrande Apparatus PDFAkash SahuNo ratings yet
- Sieve Analysis of SoilDocument2 pagesSieve Analysis of SoilAkash SahuNo ratings yet
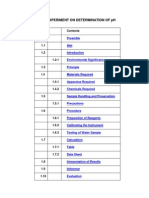
- Exp1 - PDF PHDocument12 pagesExp1 - PDF PHYogendra PatilNo ratings yet
- Exp1 - PDF PHDocument12 pagesExp1 - PDF PHYogendra PatilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 0120 GNSS DGNSS SB 041Document95 pages0120 GNSS DGNSS SB 041Douglas BemficaNo ratings yet
- Comnav G3 Installation and Operation ManualDocument94 pagesComnav G3 Installation and Operation Manualadolfo ramonNo ratings yet
- IALA Aids To Navigation Guide (NAVGUIDE)Document221 pagesIALA Aids To Navigation Guide (NAVGUIDE)YO Batia BiiNo ratings yet
- LD5-A-B Operation Manual AB-V-MA-00539 - Rev G11Document68 pagesLD5-A-B Operation Manual AB-V-MA-00539 - Rev G11Rodrigo EspíndolaNo ratings yet
- GlobalTop GPS Module FGPMMOPA6Document19 pagesGlobalTop GPS Module FGPMMOPA6peterho386No ratings yet
- Man Instr DPS110Document100 pagesMan Instr DPS110Agus SulistioNo ratings yet
- GP90 Operator's ManualDocument113 pagesGP90 Operator's Manualeboy1450% (2)
- Differential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementDocument26 pagesDifferential Global Positioning System: Marri Laxman Reddy Institute of Technology and ManagementSanjana PulapaNo ratings yet
- SurvCE V4 Instrument Setup Manual PDFDocument113 pagesSurvCE V4 Instrument Setup Manual PDFCadastru IntabulareNo ratings yet
- Understanding The Global Positioning SystemDocument10 pagesUnderstanding The Global Positioning SystemAchutKiranCherukuriNo ratings yet
- Difference Between Dgps and GPS: Local Coordinate SystemDocument2 pagesDifference Between Dgps and GPS: Local Coordinate SystemMargaveth P. BalbinNo ratings yet
- Orion Electronics Ltd. GPS Technical Reference GuideDocument142 pagesOrion Electronics Ltd. GPS Technical Reference GuidejimdigrizNo ratings yet
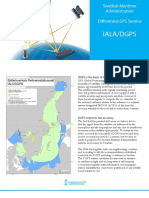
- Iala Dgps EngDocument2 pagesIala Dgps EngtommagneNo ratings yet
- DGPS BEACON RECEIVER GUIDEDocument36 pagesDGPS BEACON RECEIVER GUIDEarlindojlNo ratings yet
- Gps and Gps+Glonass RTK: Dr. Frank Van DiggelenDocument6 pagesGps and Gps+Glonass RTK: Dr. Frank Van DiggelenManikanta Sai KumarNo ratings yet
- GPS For Environmental ManagementDocument35 pagesGPS For Environmental ManagementPoluri Saicharan50% (2)
- Unit 5 SCDocument91 pagesUnit 5 SCs gopala krishnaNo ratings yet
- GPS.G2 X 01003 BDocument101 pagesGPS.G2 X 01003 BRuddy MolinaNo ratings yet
- 7000 118 339 t1 r5 Supreme SW Release NotesDocument17 pages7000 118 339 t1 r5 Supreme SW Release NotesAntonis IsidorouNo ratings yet
- GPS 6010 Manual EDocument17 pagesGPS 6010 Manual EYordan Kostadinov StrahinovNo ratings yet
- Hemisphere Vector VS330 GNSS Receiver PDFDocument2 pagesHemisphere Vector VS330 GNSS Receiver PDFAbdullateef OlaSunkanmi Olatona-MiwaNo ratings yet
- Hypersat PDFDocument49 pagesHypersat PDFjobelleNo ratings yet
- Kongsberg Maritime: Radius 1000 User'S ManualDocument58 pagesKongsberg Maritime: Radius 1000 User'S ManualGonzalo Villalobos Sanchez100% (2)
- Environment Agency (2015) Hydrometry and Telemetry - How To Perform Bathymetric Surveys Using An ADCPDocument30 pagesEnvironment Agency (2015) Hydrometry and Telemetry - How To Perform Bathymetric Surveys Using An ADCPsonantNo ratings yet
- Posmv SpecificationsDocument2 pagesPosmv Specificationschakib tabNo ratings yet
- TPSRV UmDocument276 pagesTPSRV UmBodea ClaudiuNo ratings yet
- Manual Book RTKLIBDocument81 pagesManual Book RTKLIBDwi Aji HariyantoNo ratings yet
- Specification Pilotes RotterdamsDocument7 pagesSpecification Pilotes RotterdamsHakim HaddouchiNo ratings yet
- Sensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleDocument216 pagesSensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleRăzvan PopaNo ratings yet
- Nister 2006 Visual OdometryDocument35 pagesNister 2006 Visual OdometryLinh Anh100% (1)