You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mixed-Signal ASIC Design For Digital RF Memory Applications: Michael J. Groden James R. MannDocument5 pagesMixed-Signal ASIC Design For Digital RF Memory Applications: Michael J. Groden James R. MannmdalkilicNo ratings yet
- LINEAR INTEGRATED CIRUITS - 2 Marks Question Bank - IV Sem ECEDocument19 pagesLINEAR INTEGRATED CIRUITS - 2 Marks Question Bank - IV Sem ECEJOHN PETER100% (7)
- Loudspeaker Protector: Elektor Electronics 12/96Document1 pageLoudspeaker Protector: Elektor Electronics 12/96Kalinga Jayatilake0% (1)
- Course Evaluation Form For StudentsDocument3 pagesCourse Evaluation Form For Studentssum1oruNo ratings yet
- Kalman 1960Document12 pagesKalman 1960sum1oruNo ratings yet
- Reading Assignment 26 Oct 2015Document24 pagesReading Assignment 26 Oct 2015sum1oruNo ratings yet
- DSPDocument7 pagesDSPsum1oruNo ratings yet
- DSPDocument11 pagesDSPsum1oruNo ratings yet
- Reclaiming Wisdom As The Goal of EducationDocument2 pagesReclaiming Wisdom As The Goal of Educationsum1oruNo ratings yet
- Malarial Vaccine Design Using Nanoparticles: Submitted To Dr. Sadaf Zaidi Submitted by Mehak Toor Dated 17 Dec 2012Document4 pagesMalarial Vaccine Design Using Nanoparticles: Submitted To Dr. Sadaf Zaidi Submitted by Mehak Toor Dated 17 Dec 2012sum1oruNo ratings yet
- Working InstructionDocument41 pagesWorking Instructionsum1oru100% (1)
- P16 LED Display Service and Maintenance ManualDocument6 pagesP16 LED Display Service and Maintenance Manualsum1oruNo ratings yet
- Big-Dam - Mazhar Kaleem Imran SeriesDocument164 pagesBig-Dam - Mazhar Kaleem Imran SeriesToronto_Scorpions100% (1)
- Lecture No 01: Advanced Wireless CommunicationsDocument23 pagesLecture No 01: Advanced Wireless Communicationssum1oruNo ratings yet
- Zero PaddingDocument15 pagesZero Paddingsum1oruNo ratings yet
- Coffe Cheese ToffeeDocument1 pageCoffe Cheese Toffeesum1oruNo ratings yet
- Coffe Cheese ToffeeDocument1 pageCoffe Cheese Toffeesum1oruNo ratings yet
- Synoxo-SYN520R C123103Document21 pagesSynoxo-SYN520R C123103Behnam GanjiNo ratings yet
- Basic Electrical and Electronics Engineering LabDocument18 pagesBasic Electrical and Electronics Engineering Labanusha bamzaiNo ratings yet
- I) Ii) Iii) Iv) I) Ii) Iii) Iv) V) Vi) : Bangladesh Power Development Board Marks DistributionDocument3 pagesI) Ii) Iii) Iv) I) Ii) Iii) Iv) V) Vi) : Bangladesh Power Development Board Marks DistributionsadmanNo ratings yet
- Chapter 11 Resonance in AC CircuitsDocument40 pagesChapter 11 Resonance in AC CircuitsGaurav SinghalNo ratings yet
- Dac 2Document15 pagesDac 2Hutanu GabrielNo ratings yet
- ICA-UNIT-III - R19-CompleteDocument28 pagesICA-UNIT-III - R19-CompleteBhanu Kiran BKNo ratings yet
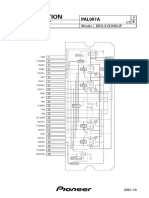
- Pioneer Pal007a Datasheet PDFDocument1 pagePioneer Pal007a Datasheet PDFroto44No ratings yet
- Chapter 1 DC KCL KVL (Part 2)Document17 pagesChapter 1 DC KCL KVL (Part 2)Farhana baharimNo ratings yet
- Chapter 3 Logic GatesDocument16 pagesChapter 3 Logic GatesbeebeeseyneeNo ratings yet
- TLSingal Analog and Digital Communications Chapter 06 2Document51 pagesTLSingal Analog and Digital Communications Chapter 06 2Ashish SuriNo ratings yet
- Institute - Uie Department-Academic Unit-1: Digital Electronics LabDocument23 pagesInstitute - Uie Department-Academic Unit-1: Digital Electronics LabkkkljhjNo ratings yet
- Sgmicro-Sgm6132yps8g-Tr C87095Document14 pagesSgmicro-Sgm6132yps8g-Tr C87095ghozi mtNo ratings yet
- Steps For MOSFET Small Signal AnalysisDocument7 pagesSteps For MOSFET Small Signal Analysisfrank wangNo ratings yet
- LS7184 Cuadratura EncoderDocument4 pagesLS7184 Cuadratura Encodercastellano_1983No ratings yet
- DC-DC Converters For Switch-Mode DC Power Supplies and Dc-Motor DrivesDocument34 pagesDC-DC Converters For Switch-Mode DC Power Supplies and Dc-Motor DrivesDina GaranNo ratings yet
- Co Lab ManualDocument22 pagesCo Lab ManualSachin Saxena100% (2)
- Diode ApplicationsDocument22 pagesDiode ApplicationsAnonymous eWMnRr70qNo ratings yet
- 2.5 Solid-State RelaysDocument4 pages2.5 Solid-State Relaysmuez zabenNo ratings yet
- 74 HC 138Document5 pages74 HC 138dlbplbNo ratings yet
- Low Voltage Low Power Current Comparator Using Dtmos: AbstractDocument5 pagesLow Voltage Low Power Current Comparator Using Dtmos: AbstractBüşra AkyıldızNo ratings yet
- Prjcts On Timers & CountersDocument3 pagesPrjcts On Timers & CountersVamsi Mani Deep Elapakurty100% (2)
- Assignment No 3Document5 pagesAssignment No 3Zulqarnain KhanNo ratings yet
- Shift RegistersDocument37 pagesShift RegistersselvaNo ratings yet
- Analog Electronic Circuit Engineering PDFDocument434 pagesAnalog Electronic Circuit Engineering PDFSeang Hok Yiev100% (3)
- 10 2 Stage AmplifierDocument7 pages10 2 Stage AmplifierAmarnath UmbrajkarNo ratings yet
- Analysis of BJT Amplifiers: Common-Emitter Amplifier, Common-Base Amplifier, Common-Collector AmplifierDocument12 pagesAnalysis of BJT Amplifiers: Common-Emitter Amplifier, Common-Base Amplifier, Common-Collector AmplifierRamo ZNo ratings yet
- Class-A Source Follower With External Resistor Output StageDocument23 pagesClass-A Source Follower With External Resistor Output StagelaksologinNo ratings yet