You might also like
- Fall 17 Masters GuideDocument50 pagesFall 17 Masters GuideShivam Agarwal80% (5)
- Machine Learning Coursera All ExerciesDocument117 pagesMachine Learning Coursera All Exerciesshrikedpill70% (10)
- Programming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandProgramming with MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 4.5 out of 5 stars4.5/5 (3)
- SEO For Growth: The Ultimate Guide For Marketers, Web Designers & EntrepreneursDocument7 pagesSEO For Growth: The Ultimate Guide For Marketers, Web Designers & EntrepreneursJoyce M LaurenNo ratings yet
- 07.4 111 FW ML PF WPS 20mm ENGDocument1 page07.4 111 FW ML PF WPS 20mm ENGViktorNo ratings yet
- Solved Problems: EEE 241 Computer ProgrammingDocument11 pagesSolved Problems: EEE 241 Computer ProgrammingŞemsettin karakuşNo ratings yet
- Solving Odes in M: AtlabDocument26 pagesSolving Odes in M: AtlabmarquitosgarciNo ratings yet
- Lab 5Document9 pagesLab 5Kaori Miyazono (Kobe)No ratings yet
- Rapid Mathematical Programming or How To Solve Sudoku Puzzles in A Few SecondsDocument8 pagesRapid Mathematical Programming or How To Solve Sudoku Puzzles in A Few SecondsKrishnan RajNo ratings yet
- Zietz, 2007Document23 pagesZietz, 2007Jessica GutierrezNo ratings yet
- IE507 Lab06Document4 pagesIE507 Lab06khalandarNo ratings yet
- Chapter 11 Mathematica For EconomistsDocument17 pagesChapter 11 Mathematica For EconomistsAkif MuhammadNo ratings yet
- OR RecordDocument35 pagesOR RecordGOWTHAM H : CSBS DEPTNo ratings yet
- SciServerLab Session1 2023-24 StudentDocument27 pagesSciServerLab Session1 2023-24 StudentwilliamgmurquhartNo ratings yet
- Affan Telek - F23 - Lab07 - FunctionsDocument8 pagesAffan Telek - F23 - Lab07 - FunctionsAffan TelekNo ratings yet
- Introduction To Matlab ProgrammingDocument6 pagesIntroduction To Matlab ProgrammingAlex GreggNo ratings yet
- IE507 Lab02 UpdatedDocument5 pagesIE507 Lab02 UpdatedHari NarayanNo ratings yet
- Data Structures Assignment: Problem 1Document7 pagesData Structures Assignment: Problem 1api-26041279No ratings yet
- IE507 Lab04Document4 pagesIE507 Lab04Hari NarayanNo ratings yet
- 37 Using OctaveDocument13 pages37 Using Octavegrecatprep9045No ratings yet
- MIT6 189IAP11 hw2Document8 pagesMIT6 189IAP11 hw2Ali AkhavanNo ratings yet
- Submit, Be Patient and Wait - Attachments Take A While To Upload. Hitting Submit Multiple Times Will Result in Multiple SubmissionsDocument7 pagesSubmit, Be Patient and Wait - Attachments Take A While To Upload. Hitting Submit Multiple Times Will Result in Multiple SubmissionsBill WilliamsNo ratings yet
- Module 2: Problem Solving Techniques Unit 1Document7 pagesModule 2: Problem Solving Techniques Unit 1Alipriya ChatterjeeNo ratings yet
- ECE 452: Computer Organization and DesignDocument9 pagesECE 452: Computer Organization and Designdermeister1988No ratings yet
- Model Solutions For Homework Assignment 1 CS798: 1 NoteDocument7 pagesModel Solutions For Homework Assignment 1 CS798: 1 NoteAbhishek ParmarNo ratings yet
- LAB0 UPDATED Converted - Compressed PDFDocument20 pagesLAB0 UPDATED Converted - Compressed PDFAkash KanyadharaNo ratings yet
- C 04 Samp 1Document6 pagesC 04 Samp 1Hitesh ShahNo ratings yet
- My Course Outline PDFDocument11 pagesMy Course Outline PDFErnest PaulNo ratings yet
- Homewk LTDocument2 pagesHomewk LTSongya PanNo ratings yet
- An Introduction To MATLAB For Loops and M-FilesDocument15 pagesAn Introduction To MATLAB For Loops and M-FilesJandry LuhukayNo ratings yet
- CSC307 Lab 02 - 0Document8 pagesCSC307 Lab 02 - 0Temitayo AdewaleNo ratings yet
- Lab1 DSPDocument15 pagesLab1 DSPAli HassanNo ratings yet
- Lab 11 (Last Lab) - Lab 10 and Crib Sheet Are Attached To This Document Problem 11-1Document5 pagesLab 11 (Last Lab) - Lab 10 and Crib Sheet Are Attached To This Document Problem 11-1Massie ArueyinghoNo ratings yet
- Assignment Problem and NonlinearDocument44 pagesAssignment Problem and NonlinearAyushi JainNo ratings yet
- Mini-Project: Image Compression: Tsrt04 - I MDocument7 pagesMini-Project: Image Compression: Tsrt04 - I MAbinash MishraNo ratings yet
- Pylecture 02Document50 pagesPylecture 02SolomonNo ratings yet
- Spa Sem 2 PDFDocument754 pagesSpa Sem 2 PDFAayushi PatelNo ratings yet
- The First-Half Review: 1.1 Local LabelsDocument5 pagesThe First-Half Review: 1.1 Local LabelsakhiyarwaladiNo ratings yet
- DrugDocument47 pagesDrugmaimonuNo ratings yet
- MB0048 Spring Drive 2012 SolvedDocument14 pagesMB0048 Spring Drive 2012 Solvedashish15666100% (1)
- Stanford Machine Learning Exercise 1Document15 pagesStanford Machine Learning Exercise 1MaxNo ratings yet
- Lab Information: 1.1 Introduction To GLPKDocument6 pagesLab Information: 1.1 Introduction To GLPKGerson SchafferNo ratings yet
- Optimizing C++/Code Optimization/faster Operations: Structure Fields OrderDocument5 pagesOptimizing C++/Code Optimization/faster Operations: Structure Fields OrderTukang UsilNo ratings yet
- A Survey of Lot Sizing and Scheduling ModelsDocument10 pagesA Survey of Lot Sizing and Scheduling ModelsClebson CardosoNo ratings yet
- Matlab Lab ManualDocument22 pagesMatlab Lab Manualticpony0% (1)
- Y 1999 PAPER1Document7 pagesY 1999 PAPER1hussainfizamNo ratings yet
- Chapter 4: Statement Formatting: Formatting The Body of The ProgramDocument20 pagesChapter 4: Statement Formatting: Formatting The Body of The Programapi-3745065No ratings yet
- CPLEX Tutorial HandoutDocument10 pagesCPLEX Tutorial HandoutPrateep AithaNo ratings yet
- Assignment: 7: Due: Language Level: Allowed Recursion: Files To Submit: Warmup Exercises: Practise ExercisesDocument6 pagesAssignment: 7: Due: Language Level: Allowed Recursion: Files To Submit: Warmup Exercises: Practise ExercisesYanling LinNo ratings yet
- MB0048 - Operations Research: Assignment Set 1Document24 pagesMB0048 - Operations Research: Assignment Set 1vbolly12100% (1)
- 3 07 Paper IiiDocument5 pages3 07 Paper IiiKampa LavanyaNo ratings yet
- FIT1053 Workshop01 QuestionsDocument5 pagesFIT1053 Workshop01 QuestionsAlireza KafaeiNo ratings yet
- Data Types, Arithmetic, Strings, InputDocument19 pagesData Types, Arithmetic, Strings, Inputhani haniNo ratings yet
- PSPP Two Marks Faq-First-Two-Units-2022Document12 pagesPSPP Two Marks Faq-First-Two-Units-2022thanushabaskarNo ratings yet
- Lecture 25Document28 pagesLecture 25Steven MeyersNo ratings yet
- Interview QuestDocument13 pagesInterview QuestSandeep GargNo ratings yet
- Week 2 - Intro MoselDocument46 pagesWeek 2 - Intro MoselEmile CornelissenNo ratings yet
- ItDocument63 pagesItMarium AliNo ratings yet
- Cs201 Final Notce by Mohsin Raza (1) - 1Document30 pagesCs201 Final Notce by Mohsin Raza (1) - 1Umme Rubab saleemNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Collapsible Steering ColumnDocument2 pagesCollapsible Steering ColumnKrishna KumarNo ratings yet
- BulldogDocument20 pagesBulldogFlorinNo ratings yet
- Obtaining Technology - ImplementationDocument13 pagesObtaining Technology - ImplementationEric EugenioNo ratings yet
- Chapter 5 SupplementsDocument5 pagesChapter 5 SupplementsGabriela MironNo ratings yet
- ECE 551 Assignment 2: Ajit R Kanale, 200132821 January 25, 2017Document5 pagesECE 551 Assignment 2: Ajit R Kanale, 200132821 January 25, 2017Ajit KanaleNo ratings yet
- Cost, Time and Quality, Two Best Guesses and A Phenomenon, Its Time To Accept Other Success CriteriaDocument6 pagesCost, Time and Quality, Two Best Guesses and A Phenomenon, Its Time To Accept Other Success Criteriaapi-3707091100% (2)
- EEPW3142 QP Version-ADocument8 pagesEEPW3142 QP Version-A3nathNo ratings yet
- Gmail - CAMPUS DRIVE NOTIFICATION - Himadri Speciality Chemical LTDDocument2 pagesGmail - CAMPUS DRIVE NOTIFICATION - Himadri Speciality Chemical LTDShresth SanskarNo ratings yet
- 24 Plait 8ft Bullwhip RecipeDocument9 pages24 Plait 8ft Bullwhip RecipeTyler RiceNo ratings yet
- Acquisitions Bentley SystemsDocument3 pagesAcquisitions Bentley SystemsPramit Kumar SenapatiNo ratings yet
- 2014 Rude Customer ServiceDocument3 pages2014 Rude Customer ServiceCaptain WalkerNo ratings yet
- User Manual: Touch Control LED LampDocument1 pageUser Manual: Touch Control LED LampHector LuisNo ratings yet
- Fibac 2017 ReportDocument68 pagesFibac 2017 ReportNitin KumarNo ratings yet
- sw70x1 Service ManualDocument35 pagessw70x1 Service ManualGitmel GutierrezNo ratings yet
- Perform Cover Hole DrillingDocument12 pagesPerform Cover Hole Drillingjulianusginting00No ratings yet
- ICBC Motorcycle Handbook (British Columbia)Document212 pagesICBC Motorcycle Handbook (British Columbia)BNo ratings yet
- Sci20 Unitb 1 8Document8 pagesSci20 Unitb 1 8api-207957230No ratings yet
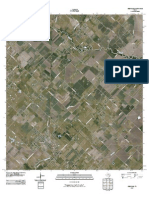
- Topographic Map of NeedvilleDocument1 pageTopographic Map of NeedvilleHistoricalMapsNo ratings yet
- Cs2000 Universal Translations3006a 50 SGDocument508 pagesCs2000 Universal Translations3006a 50 SGAleksandr BashmakovNo ratings yet
- Modes in Optical FibersDocument10 pagesModes in Optical FibersAdamStone100% (1)
- Brochure 7900E EN PDFDocument16 pagesBrochure 7900E EN PDFabvs97No ratings yet
- Cable Sheath Voltage Limiters PresentationDocument8 pagesCable Sheath Voltage Limiters PresentationRaden ArmanadiNo ratings yet
- 13.2.2.13 Lab - Incident HandlingDocument3 pages13.2.2.13 Lab - Incident Handlingc583706No ratings yet
- Micro Precision Calibration, Inc. Local Calibration ProcedureDocument3 pagesMicro Precision Calibration, Inc. Local Calibration ProcedureWuzekNo ratings yet
- Euro Ncap Aeb Test Protocol v11 PDFDocument31 pagesEuro Ncap Aeb Test Protocol v11 PDFRTCNNo ratings yet
- Mazda rx7Document3 pagesMazda rx7Jon WestNo ratings yet