You might also like
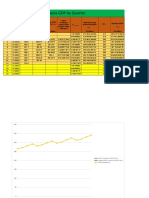
- Malaysia GDP by Quarter: Suku TahunDocument3 pagesMalaysia GDP by Quarter: Suku TahunKok An KohNo ratings yet
- Fae Zah Bahar I ProposalDocument30 pagesFae Zah Bahar I Proposalfaezahuji100% (1)
- MTES1142 Heuristic 2021062310074Document30 pagesMTES1142 Heuristic 2021062310074MT10622 Asma Zulfa Binti Mohd KhairolNo ratings yet
- Latihan Mtes3013 Tajuk4Document2 pagesLatihan Mtes3013 Tajuk4PeiEnOngNo ratings yet
- Misconception of Volume of LiquidDocument9 pagesMisconception of Volume of LiquidLynzz MajidNo ratings yet
- 03 RPT 2021 DSKP KSSR Semakan 2017 Mathematics Year 3 v4Document38 pages03 RPT 2021 DSKP KSSR Semakan 2017 Mathematics Year 3 v4leeks70No ratings yet
- 5 EsDocument4 pages5 Esapi-338458157No ratings yet
- Topic 1 Teacher and Mathematics EducationDocument21 pagesTopic 1 Teacher and Mathematics EducationDerrick Yong Thien Foh0% (1)
- Theoretical and Conceptual FrameworkDocument15 pagesTheoretical and Conceptual Frameworkdrarumugam100% (1)
- Contoh RPM Dan RPHDocument27 pagesContoh RPM Dan RPHAzlan AzmiNo ratings yet
- Exercise 3: Lactase ActivityDocument4 pagesExercise 3: Lactase Activitynur afiqahNo ratings yet
- KBSM Maths SyllabusDocument10 pagesKBSM Maths SyllabusTAY BEE LIAN100% (31)
- Assignment Olahraga PDFDocument44 pagesAssignment Olahraga PDFSelvi Nadarajah100% (1)
- Question MTES3063Document3 pagesQuestion MTES3063Muhammad Aslam Abdul HashimNo ratings yet
- Copper Wire Under Tensile StressDocument2 pagesCopper Wire Under Tensile StressCharith SuriyakulaNo ratings yet
- English For Workplace Communication Oumh 2203 SMPDocument9 pagesEnglish For Workplace Communication Oumh 2203 SMPMohamad Yazid Bin SelamatNo ratings yet
- EDUC 2220-Educational Technology Lesson Plan Template Merry MathematicsDocument4 pagesEDUC 2220-Educational Technology Lesson Plan Template Merry MathematicslindsayNo ratings yet
- HBSC1103 v2Document6 pagesHBSC1103 v2TAY JIUN HOANG MoeNo ratings yet
- SBL 1023 Exp 2Document8 pagesSBL 1023 Exp 2api-383623349No ratings yet
- CEL 2107 Material 3Document6 pagesCEL 2107 Material 3shahida zainon100% (1)
- Components in The Daily Teaching Plan Using The KSSR Standard Documents: Learning Objectives & Standard Based AssessmentDocument12 pagesComponents in The Daily Teaching Plan Using The KSSR Standard Documents: Learning Objectives & Standard Based AssessmentArthas Rhee HermanNo ratings yet
- #LOVE (Physically Fit, Mentally Healthy)Document3 pages#LOVE (Physically Fit, Mentally Healthy)Siti Fadzlina Zainol RashidNo ratings yet
- Trialogical Learning Process Model (Stage 1 - Stage 3)Document5 pagesTrialogical Learning Process Model (Stage 1 - Stage 3)jkjkbnbNo ratings yet
- GROUP ASSIGNMENT (2) Arunah N Saranya NewDocument62 pagesGROUP ASSIGNMENT (2) Arunah N Saranya NewSaranya KaliappanNo ratings yet
- Ways of Lifelong Learning As A TeacherDocument17 pagesWays of Lifelong Learning As A TeacherQuelice Zreel LingNo ratings yet
- ESE 633 Statistics in EducationDocument10 pagesESE 633 Statistics in Educationyasini100% (1)
- Rancangan Pengajaran Harian (RPH)Document6 pagesRancangan Pengajaran Harian (RPH)Kogaraju SubramaneyamNo ratings yet
- Application of Robust Multivarite Control Chart With Winsorized Mean, A Caso Stdy PDFDocument11 pagesApplication of Robust Multivarite Control Chart With Winsorized Mean, A Caso Stdy PDFZORNELLYS GUERRA HERNANDEZNo ratings yet
- M3 JurnalDocument2 pagesM3 JurnalNURIZZATI NAJIHAH BINTI MOHD NAZAR T6No ratings yet
- NCTM and Ccss Principles PDFDocument12 pagesNCTM and Ccss Principles PDFapi-437407548No ratings yet
- SIPP Tool - v.05 IPlan 2019Document12 pagesSIPP Tool - v.05 IPlan 2019Jesson AlbaranNo ratings yet
- Jadual Penentu Saiz SampelDocument2 pagesJadual Penentu Saiz SampelFadhillah RahimNo ratings yet
- Tutorial 3 (KBSR & KSSR)Document5 pagesTutorial 3 (KBSR & KSSR)Alvin WongNo ratings yet
- Bmu AssignmnetDocument18 pagesBmu AssignmnetMaizaRidzuanNo ratings yet
- Apic2016 Malaysia Report PDFDocument48 pagesApic2016 Malaysia Report PDFLiyana SyamimiNo ratings yet
- BAB 1 Definisi, Falsafah, Prinsip Dan Matlamat Bimbingan Dan KaunselingDocument12 pagesBAB 1 Definisi, Falsafah, Prinsip Dan Matlamat Bimbingan Dan KaunselingWan Nurhidayati Wan JohariNo ratings yet
- Gsa1072 Statistik AsasDocument15 pagesGsa1072 Statistik AsasHafiz Yatin100% (1)
- (1-10) Pelaksanaan Komuniti Pembelajaran PDFDocument10 pages(1-10) Pelaksanaan Komuniti Pembelajaran PDFkathiresanNo ratings yet
- KSSR Year Four Graphic NovelsDocument32 pagesKSSR Year Four Graphic NovelsLogambigai Tiyagarajan0% (1)
- E-Buku Panduan FTKMP - 2019Document234 pagesE-Buku Panduan FTKMP - 2019Suffian Ab RazakNo ratings yet
- Proposal InovasiDocument25 pagesProposal InovasiMohd Tajudin Dini100% (2)
- Tutorial 5Document8 pagesTutorial 5ct saharahNo ratings yet
- Latihan Ulang Kaji Tajuk6Document3 pagesLatihan Ulang Kaji Tajuk6PeiEnOngNo ratings yet
- Top 10 Characteristics of A 21st Century ClassroomDocument3 pagesTop 10 Characteristics of A 21st Century ClassroomNur Syuhada NanNo ratings yet
- Abd. Rahman Bin Mat:: Assignment - Hmee5033Document12 pagesAbd. Rahman Bin Mat:: Assignment - Hmee5033Abu UzairNo ratings yet
- c084b2 PDFDocument1 pagec084b2 PDFHizirNo ratings yet
- Theme: Waves, Light and Optics Chapter 5: WavesDocument17 pagesTheme: Waves, Light and Optics Chapter 5: WavesJacqueline Lim100% (1)
- RPH Sains Tahun 4Document3 pagesRPH Sains Tahun 4nasyratulNo ratings yet
- Mtes 3083 CalculusDocument8 pagesMtes 3083 Calculus王志永No ratings yet
- RPH Cefr Y3 Language ArtsDocument2 pagesRPH Cefr Y3 Language ArtsaredeqyanaNo ratings yet
- Ecg 222 Child Development Esther Ponmalar Jeyasingam E30103120065Document20 pagesEcg 222 Child Development Esther Ponmalar Jeyasingam E30103120065Esther Ponmalar Charles100% (1)
- Soal TIMMSDocument124 pagesSoal TIMMShanah123No ratings yet
- Curriculum StudiesDocument6 pagesCurriculum StudiesSyed AliNo ratings yet
- Prinsip MoralDocument3 pagesPrinsip MoralIra ajahNo ratings yet
- Introduction To Decision Maths PDFDocument30 pagesIntroduction To Decision Maths PDFAnonymous 5Qtn0QVDuONo ratings yet
- Tugasan 2 Peta MindaDocument2 pagesTugasan 2 Peta MindaPAI5062021 NIK NOR ATIKAH BINTI NIK MATNo ratings yet
- Teacher Development StagesDocument1 pageTeacher Development StagesMary TingNo ratings yet
- Matheamtical ModelDocument41 pagesMatheamtical ModelShiv DevreNo ratings yet
- Bader 2Document12 pagesBader 2tanmaypatilNo ratings yet
- Population Modelling Workbook 2020Document48 pagesPopulation Modelling Workbook 2020Aaliyah AndreaNo ratings yet
- Super GisDocument535 pagesSuper GisNegrescu MariusNo ratings yet
- Unit II Construction PracticesDocument61 pagesUnit II Construction PracticesiploguNo ratings yet
- Rig 166 Data SheetDocument2 pagesRig 166 Data SheetEstuardo OlanNo ratings yet
- DEVISER S7200 - ManualDocument326 pagesDEVISER S7200 - ManualNicolas Maldonado BenitezNo ratings yet
- Form 03B Heritage Bell 1Document2 pagesForm 03B Heritage Bell 1ValNo ratings yet
- TMJDocument38 pagesTMJAnonymous 6kAmeZzINo ratings yet
- Kids and Their Favourite Food Key Reading Comprehension Exercises - 34436Document2 pagesKids and Their Favourite Food Key Reading Comprehension Exercises - 34436MonicaMartirosyanNo ratings yet
- Ded Deliverable List: As Per 19-08-2016Document2 pagesDed Deliverable List: As Per 19-08-2016Isna MuthoharohNo ratings yet
- Flexowell® Replacement-Belts enDocument3 pagesFlexowell® Replacement-Belts enrererererererererereNo ratings yet
- CHEM333 Syllabus 2020 2021Document4 pagesCHEM333 Syllabus 2020 2021lina kwikNo ratings yet
- Role of Packaging in Sales of FMCG Products and Its TrendsDocument57 pagesRole of Packaging in Sales of FMCG Products and Its TrendsSaurabh0% (1)
- Factory Program Library List v1.0Document9 pagesFactory Program Library List v1.0Ronaldo DamattaNo ratings yet
- 9trffi&hpr.! Ni-: Use E EDocument2 pages9trffi&hpr.! Ni-: Use E ERafi ZulfiNo ratings yet
- CPHL 214 Assignment 6Document2 pagesCPHL 214 Assignment 6NazNo ratings yet
- Wire Rope Forensics Letter PDFDocument50 pagesWire Rope Forensics Letter PDFAshley DeanNo ratings yet
- DP16B Bench Drill PressDocument20 pagesDP16B Bench Drill Pressalfri7370% (1)
- Middle East ManufacturerDocument6 pagesMiddle East Manufacturerhsco rdNo ratings yet
- LEM 91-161 Fla E 0612Document13 pagesLEM 91-161 Fla E 0612Julen IturriozNo ratings yet
- Manual de Despiece Honda Beat 100Document84 pagesManual de Despiece Honda Beat 100jorgeeu8833% (3)
- WST Macros Add-In FeaturesDocument1 pageWST Macros Add-In FeaturesTrader CatNo ratings yet
- Dobdsm 304Document39 pagesDobdsm 304LuisangelDueñasNo ratings yet
- Danas Si Moja I BozijaDocument1 pageDanas Si Moja I BozijaMoj DikoNo ratings yet
- Interactions of Microplastic Debris Throughout The Marine Ecosystem Final Tracked-Galloway, TS Cole, M Lewis, CDocument22 pagesInteractions of Microplastic Debris Throughout The Marine Ecosystem Final Tracked-Galloway, TS Cole, M Lewis, CTrydawNo ratings yet
- HLN Applications enDocument27 pagesHLN Applications enClint TcNo ratings yet
- T/PR/DIS/5.10.1: Work Procedure ForDocument38 pagesT/PR/DIS/5.10.1: Work Procedure ForAnant RubadeNo ratings yet
- Peethas ListDocument1 pagePeethas ListChetan PrajapatiNo ratings yet
- Acute and Chronic Gastrointestinal BleedingDocument7 pagesAcute and Chronic Gastrointestinal BleedingMarwan M.100% (1)
- IMDB - ColaboratoryDocument10 pagesIMDB - Colaboratory4416 LikhithaNo ratings yet
- TAS360VoIP ExDocument56 pagesTAS360VoIP ExOscar Damián Gómez HernándezNo ratings yet
- Excess Fluid VolumeDocument27 pagesExcess Fluid VolumeAdrian Ardamil100% (1)
- The Obesity Code: Unlocking the Secrets of Weight LossFrom EverandThe Obesity Code: Unlocking the Secrets of Weight LossRating: 4 out of 5 stars4/5 (6)
- Love Life: How to Raise Your Standards, Find Your Person, and Live Happily (No Matter What)From EverandLove Life: How to Raise Your Standards, Find Your Person, and Live Happily (No Matter What)No ratings yet
- ADHD is Awesome: A Guide to (Mostly) Thriving with ADHDFrom EverandADHD is Awesome: A Guide to (Mostly) Thriving with ADHDRating: 5 out of 5 stars5/5 (2)
- Breaking the Habit of Being YourselfFrom EverandBreaking the Habit of Being YourselfRating: 4.5 out of 5 stars4.5/5 (1459)
- Briefly Perfectly Human: Making an Authentic Life by Getting Real About the EndFrom EverandBriefly Perfectly Human: Making an Authentic Life by Getting Real About the EndNo ratings yet
- No Mud, No Lotus: The Art of Transforming SufferingFrom EverandNo Mud, No Lotus: The Art of Transforming SufferingRating: 5 out of 5 stars5/5 (175)
- The Happiest Baby on the Block: The New Way to Calm Crying and Help Your Newborn Baby Sleep LongerFrom EverandThe Happiest Baby on the Block: The New Way to Calm Crying and Help Your Newborn Baby Sleep LongerRating: 4.5 out of 5 stars4.5/5 (58)
- Prisoners of Geography: Ten Maps That Explain Everything About the WorldFrom EverandPrisoners of Geography: Ten Maps That Explain Everything About the WorldRating: 4.5 out of 5 stars4.5/5 (1145)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipFrom EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipRating: 4.5 out of 5 stars4.5/5 (1135)
- Summary of The 4-Hour Body: An Uncommon Guide to Rapid Fat-Loss, Incredible Sex, and Becoming Superhuman by Timothy FerrissFrom EverandSummary of The 4-Hour Body: An Uncommon Guide to Rapid Fat-Loss, Incredible Sex, and Becoming Superhuman by Timothy FerrissRating: 4.5 out of 5 stars4.5/5 (82)
- Peaceful Sleep Hypnosis: Meditate & RelaxFrom EverandPeaceful Sleep Hypnosis: Meditate & RelaxRating: 4.5 out of 5 stars4.5/5 (142)
- The Bridesmaid: The addictive psychological thriller that everyone is talking aboutFrom EverandThe Bridesmaid: The addictive psychological thriller that everyone is talking aboutRating: 4 out of 5 stars4/5 (131)
- Neville Goddard Master Course to Manifest Your Desires Into Reality Using The Law of Attraction: Learn the Secret to Overcoming Your Current Problems and Limitations, Attaining Your Goals, and Achieving Health, Wealth, Happiness and Success!From EverandNeville Goddard Master Course to Manifest Your Desires Into Reality Using The Law of Attraction: Learn the Secret to Overcoming Your Current Problems and Limitations, Attaining Your Goals, and Achieving Health, Wealth, Happiness and Success!Rating: 5 out of 5 stars5/5 (284)
- Raising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsFrom EverandRaising Good Humans: A Mindful Guide to Breaking the Cycle of Reactive Parenting and Raising Kind, Confident KidsRating: 4.5 out of 5 stars4.5/5 (170)
- For Women Only, Revised and Updated Edition: What You Need to Know About the Inner Lives of MenFrom EverandFor Women Only, Revised and Updated Edition: What You Need to Know About the Inner Lives of MenRating: 4.5 out of 5 stars4.5/5 (271)
- Sleep Stories for Adults: Overcome Insomnia and Find a Peaceful AwakeningFrom EverandSleep Stories for Adults: Overcome Insomnia and Find a Peaceful AwakeningRating: 4 out of 5 stars4/5 (3)
- Outlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisFrom EverandOutlive: The Science and Art of Longevity by Peter Attia: Key Takeaways, Summary & AnalysisRating: 4 out of 5 stars4/5 (1)
- My Little Brother: The unputdownable, page-turning psychological thriller from Diane SaxonFrom EverandMy Little Brother: The unputdownable, page-turning psychological thriller from Diane SaxonRating: 4.5 out of 5 stars4.5/5 (38)
- 369: Manifesting Through 369 and the Law of Attraction - METHODS, TECHNIQUES AND EXERCISESFrom Everand369: Manifesting Through 369 and the Law of Attraction - METHODS, TECHNIQUES AND EXERCISESRating: 5 out of 5 stars5/5 (50)
- Gut: the new and revised Sunday Times bestsellerFrom EverandGut: the new and revised Sunday Times bestsellerRating: 4 out of 5 stars4/5 (393)
- Forever Strong: A New, Science-Based Strategy for Aging WellFrom EverandForever Strong: A New, Science-Based Strategy for Aging WellNo ratings yet
- Summary of The Art of Seduction by Robert GreeneFrom EverandSummary of The Art of Seduction by Robert GreeneRating: 4 out of 5 stars4/5 (46)
- The Secret Teachings Of All Ages: AN ENCYCLOPEDIC OUTLINE OF MASONIC, HERMETIC, QABBALISTIC AND ROSICRUCIAN SYMBOLICAL PHILOSOPHYFrom EverandThe Secret Teachings Of All Ages: AN ENCYCLOPEDIC OUTLINE OF MASONIC, HERMETIC, QABBALISTIC AND ROSICRUCIAN SYMBOLICAL PHILOSOPHYRating: 4.5 out of 5 stars4.5/5 (4)