You might also like
- Interconnect 03 - Interconnect ModelingDocument31 pagesInterconnect 03 - Interconnect ModelingManar MansourNo ratings yet
- ECEN689: Special Topics in High-Speed Links Circuits and Systems Spring 2012Document35 pagesECEN689: Special Topics in High-Speed Links Circuits and Systems Spring 2012api-127299018No ratings yet
- Lec8 PDFDocument36 pagesLec8 PDFPhan Phuong NgocNo ratings yet
- Circuit Theory - EM II: DR David Ottaway Braggs 412 PH 8313 5165 David - Ottaway@adelaide - Edu.auDocument51 pagesCircuit Theory - EM II: DR David Ottaway Braggs 412 PH 8313 5165 David - Ottaway@adelaide - Edu.augfshhdNo ratings yet
- Lec 1 Introduction Frequencty ResponseDocument61 pagesLec 1 Introduction Frequencty ResponseAli AhmadNo ratings yet
- PDC Lab ManualDocument71 pagesPDC Lab Manualswapnadeepika100% (3)
- Wein Bridge Oscillators PresentationDocument15 pagesWein Bridge Oscillators PresentationHarish KumarNo ratings yet
- F2011-3EJ4 Set 06 Oscillators StudentsDocument15 pagesF2011-3EJ4 Set 06 Oscillators Studentsf430_fillNo ratings yet
- EE 42/43/100 Introduction To Digital Electronics: Review of Ch. 4-7.3 7/19/13Document43 pagesEE 42/43/100 Introduction To Digital Electronics: Review of Ch. 4-7.3 7/19/13ozanistzNo ratings yet
- Three Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007Document16 pagesThree Bit Phase Shifter: MMIC Project Final Report EE525.787 Fall 2007eesharifNo ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- IES Conv.-1Document11 pagesIES Conv.-1PawanKumar BarnwalNo ratings yet
- VLSI Design: Lecture 3a: Nonideal TransistorsDocument30 pagesVLSI Design: Lecture 3a: Nonideal TransistorsBhagirath BhattNo ratings yet
- ECEN620: Network Theory Broadband Circuit Design Fall 2012: Lecture 15: Voltage-Controlled OscillatorsDocument24 pagesECEN620: Network Theory Broadband Circuit Design Fall 2012: Lecture 15: Voltage-Controlled OscillatorsMarius FerdyNo ratings yet
- First and Second Order Filters: Ts asa s ωDocument66 pagesFirst and Second Order Filters: Ts asa s ωDilshan AnanthNo ratings yet
- Transient Response Counts When Choosing Phase MarginDocument4 pagesTransient Response Counts When Choosing Phase Marginharis13harisNo ratings yet
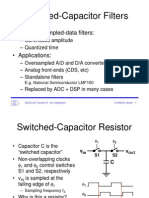
- Switched-Capacitor Filters: - "Analog" Sampled-Data FiltersDocument24 pagesSwitched-Capacitor Filters: - "Analog" Sampled-Data FiltersPushpendra DwivediNo ratings yet
- Buffer InsertionDocument47 pagesBuffer InsertionAkshay DesaiNo ratings yet
- EE236: Experiment No. 1 NGSPICE Simulation of RC and RLC CircuitsDocument15 pagesEE236: Experiment No. 1 NGSPICE Simulation of RC and RLC CircuitsAakanksha JainNo ratings yet
- 2-The Selectivity ProblemDocument47 pages2-The Selectivity ProblemMuhammad UsmanNo ratings yet
- Class07 Using Transmission LinesDocument24 pagesClass07 Using Transmission LinesVikram Raj SinghNo ratings yet
- 07NANO107 Transient Analysis of RC-RL CircuitsDocument20 pages07NANO107 Transient Analysis of RC-RL CircuitsJames Hyun Wook ParkNo ratings yet
- Phase Margin and Quality FactorDocument7 pagesPhase Margin and Quality FactorVIJAYPUTRANo ratings yet
- Dynamic Analysis of Switching ConvertersDocument134 pagesDynamic Analysis of Switching ConvertersLisonildoNo ratings yet
- ,,,,CNT Lab ReportDocument13 pages,,,,CNT Lab ReportHosea MuchiriNo ratings yet
- Files 3-Lesson Notes Lecture 17Document6 pagesFiles 3-Lesson Notes Lecture 17kingboyNo ratings yet
- Parasitic Components Effect ResonantDocument39 pagesParasitic Components Effect ResonantAhmed58seribegawanNo ratings yet
- Hmwk02 SolutionDocument4 pagesHmwk02 SolutionTarik ZiadNo ratings yet
- EE 312 Basic Electronic Instrument LaboratoryDocument25 pagesEE 312 Basic Electronic Instrument LaboratoryAnonymous ux7KlgruqgNo ratings yet
- A Unified Model For The ZVS DC-DC Converters With Active ClampDocument31 pagesA Unified Model For The ZVS DC-DC Converters With Active ClampTirthankar MohantyNo ratings yet
- Topology Review DC DC ConvertersDocument54 pagesTopology Review DC DC ConvertersaknuslNo ratings yet
- Low-Pass Filter:: S S S in The Numerator, First Order Filters Are Classified As Lowpass, HighpassDocument6 pagesLow-Pass Filter:: S S S in The Numerator, First Order Filters Are Classified As Lowpass, HighpassNuraddeen MagajiNo ratings yet
- Linear Wave Shaping: Department of Electronics and Communication EngineeringDocument0 pagesLinear Wave Shaping: Department of Electronics and Communication EngineeringanishadandaNo ratings yet
- Unusual Filter CktsDocument46 pagesUnusual Filter Cktsraineymj100% (1)
- 333 Answers 2009 10 Q1 FinalDocument3 pages333 Answers 2009 10 Q1 Finalaku011987No ratings yet
- CiontrolLecturePartII 2020Document80 pagesCiontrolLecturePartII 2020Adithya RaoNo ratings yet
- 1.RC CircuitsDocument7 pages1.RC CircuitsNaveen ChNo ratings yet
- VSWR and S ParameterDocument48 pagesVSWR and S ParameterJaime JarrinNo ratings yet
- Eleg. 2111 Laboratory 6 "Q" Factor and Transient Response of An RLC Series CircuitDocument9 pagesEleg. 2111 Laboratory 6 "Q" Factor and Transient Response of An RLC Series Circuitpra_zara2637No ratings yet
- Control BoostDocument10 pagesControl BoostNikunj AgarwalNo ratings yet
- Power Electronics Slides and Notes DC ConvertersDocument40 pagesPower Electronics Slides and Notes DC ConvertersAnoop MathewNo ratings yet
- Sdic 2marks (Q & A) (Unit 2)Document4 pagesSdic 2marks (Q & A) (Unit 2)Ganapathy RamadossNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- 689 Track HoldDocument35 pages689 Track HoldShiva KumarNo ratings yet
- In-Building Propagation Modelling: John Litva January 31, 2007Document49 pagesIn-Building Propagation Modelling: John Litva January 31, 2007Krispi FruttiNo ratings yet
- CH 4 - OscillatorDocument41 pagesCH 4 - OscillatorSathisEce100% (1)
- Digital To Analog: R R D V 2R DDocument13 pagesDigital To Analog: R R D V 2R DRudra MishraNo ratings yet
- Astable MultivibratorDocument38 pagesAstable MultivibratorSherry Sher0% (1)
- CH 4 - Oscillator Sem II 2015 UPLOADDocument53 pagesCH 4 - Oscillator Sem II 2015 UPLOADdemonones100% (1)
- Switched Capacitor CircuitsDocument50 pagesSwitched Capacitor CircuitsRaneforyon100% (1)
- COE-EE 371 Lab ManualDocument65 pagesCOE-EE 371 Lab ManualDzramado Kennedy SolomonNo ratings yet
- Solution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)Document12 pagesSolution To Ele22Emi 2004 November Exam: V V 0) Is Called The Zero Offset.)سعيد ابوسريعNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- Linear Wave ShapingDocument29 pagesLinear Wave Shapingapnrao100% (6)
- Exercise7 Finish SOLDocument16 pagesExercise7 Finish SOLMarcelo L. S.No ratings yet
- L211 Series Resonance and TimeFrequency Response of Passive Networks PDFDocument25 pagesL211 Series Resonance and TimeFrequency Response of Passive Networks PDFglenlcy100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Final ProjectDocument2 pagesFinal ProjectBOBNo ratings yet
- 7assignment Summer2015Document1 page7assignment Summer2015BOBNo ratings yet
- 16f Hmwk9Document2 pages16f Hmwk9BOBNo ratings yet
- ADFSDFSDFDocument7 pagesADFSDFSDFBOBNo ratings yet
- Assignment 8Document4 pagesAssignment 8BOBNo ratings yet
- Transistions Between StatesDocument13 pagesTransistions Between StatesBOBNo ratings yet
- Lectures #8 & #9Document30 pagesLectures #8 & #9BOBNo ratings yet
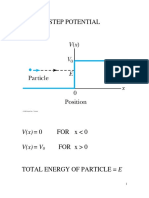
- Step PotentialDocument34 pagesStep PotentialBOBNo ratings yet
- Relativity: Einstein Published Two Theories of Relativity in 1905Document48 pagesRelativity: Einstein Published Two Theories of Relativity in 1905BOBNo ratings yet
- LASERSDocument26 pagesLASERSBOBNo ratings yet
- A. The Photons Gain Higher Speeds B. The Energy of The Photons Is Increased C. The Number ofDocument11 pagesA. The Photons Gain Higher Speeds B. The Energy of The Photons Is Increased C. The Number ofBOBNo ratings yet
- Final Exam Print Name 6, 2011Document7 pagesFinal Exam Print Name 6, 2011BOBNo ratings yet
- 07 Equivalent ResistancesDocument6 pages07 Equivalent ResistancesBOBNo ratings yet
- FFFFDocument10 pagesFFFFBOBNo ratings yet
- Prac Exam 1 StudyDocument15 pagesPrac Exam 1 StudyBOBNo ratings yet
- Reading Assignments SPRING 2015Document1 pageReading Assignments SPRING 2015BOBNo ratings yet
- Inductors in SeriesDocument6 pagesInductors in SeriesBOBNo ratings yet
- Ansi - Esd S20.20-2007Document19 pagesAnsi - Esd S20.20-2007111No ratings yet
- Digital TutotrialsDocument29 pagesDigital Tutotrialsrktiwary256034No ratings yet
- Fisher & Paykel Quick ReferenceDocument28 pagesFisher & Paykel Quick ReferenceNeilJenkins100% (2)
- Physical-Layer Cell Identity (PCI) Planning GuidelinesDocument18 pagesPhysical-Layer Cell Identity (PCI) Planning GuidelinesAqeel HasanNo ratings yet
- Equipments in Sub StationDocument8 pagesEquipments in Sub Stationdgladiator3180% (10)
- Configuring Poe: Finding Feature InformationDocument18 pagesConfiguring Poe: Finding Feature InformationEsromdNo ratings yet
- MCRNC Architecture and ConfigurationsDocument65 pagesMCRNC Architecture and Configurationskone mounaNo ratings yet
- 2 2 R07 Sup Apr 2012Document9 pages2 2 R07 Sup Apr 2012Shareef KhanNo ratings yet
- Iskraemeco Mx37y Technical DescriptionDocument38 pagesIskraemeco Mx37y Technical DescriptionmirelaMENo ratings yet
- HPP Ashta Project LeafletDocument4 pagesHPP Ashta Project LeafletsalicurriNo ratings yet
- Manual Rps 450 GB Vec626r0Document86 pagesManual Rps 450 GB Vec626r0hernangyc100% (1)
- LightningPick PLC BridgeDocument4 pagesLightningPick PLC BridgeczarbjNo ratings yet
- Equalizer RingsDocument1 pageEqualizer RingsMr. No oneNo ratings yet
- Topten Mantul DP II Teknika 8mbDocument867 pagesTopten Mantul DP II Teknika 8mbPersada tugboatNo ratings yet
- ATmega128 Application NotesDocument386 pagesATmega128 Application NotesArun P MadhavNo ratings yet
- Weigh Bridge Truck Out Finding ReportDocument6 pagesWeigh Bridge Truck Out Finding Reportbee398No ratings yet
- 9 Equivalent ResistanceDocument5 pages9 Equivalent ResistanceTheGreatHelperNo ratings yet
- Jasco Fp920 Manual 1995 EngDocument106 pagesJasco Fp920 Manual 1995 Eng82ghost82No ratings yet
- Tda 7292Document22 pagesTda 7292pedro santosNo ratings yet
- Digital Signal Processing by ChitodeDocument588 pagesDigital Signal Processing by Chitodeanandbabugopathoti100% (3)
- Sentry EEx User's Guide Jun 2015Document76 pagesSentry EEx User's Guide Jun 2015Paul BrooksNo ratings yet
- 3d Printers, LCD, Led & OledDocument16 pages3d Printers, LCD, Led & OledMalikNo ratings yet
- Whatever Happen To The Ground Roll - AnsteyDocument6 pagesWhatever Happen To The Ground Roll - AnsteybangadesNo ratings yet
- Input and Output DevicesDocument6 pagesInput and Output DevicesLakshmiRengarajanNo ratings yet
- Case Study IMCC PanelDocument3 pagesCase Study IMCC PanelKapil GalwaniNo ratings yet
- Comf2167 Pss en - IdDocument9 pagesComf2167 Pss en - IdMuhammad Nur RokimNo ratings yet
- v3 iMediaTouchOnAirUsersManualDocument19 pagesv3 iMediaTouchOnAirUsersManualIgroufa NaguibNo ratings yet
- Ena2232 D 1Document5 pagesEna2232 D 1Abdul RahmanNo ratings yet
- Synopsis DC LoadDocument8 pagesSynopsis DC LoadManjunath MjNo ratings yet
- 9131c1 PX2Document4 pages9131c1 PX2ChrisNo ratings yet