You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Fast Fourier Transform - Paul Bourke (1993)Document16 pagesFast Fourier Transform - Paul Bourke (1993)Phat Luong100% (1)
- Exp7 WatermarkDocument8 pagesExp7 Watermarkraneraji123No ratings yet
- Lab 8Document8 pagesLab 8shajib19No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Section1.4 FFT AlgorithmDocument11 pagesSection1.4 FFT AlgorithmGovardhan Reddy.GNo ratings yet
- Digital Signal ProcessingDocument40 pagesDigital Signal Processingshankar100% (2)
- Discrete-Time Fourier TransformDocument5 pagesDiscrete-Time Fourier TransformLucas GallindoNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Ece Odd9Document17 pagesEce Odd9Venkat MuruganNo ratings yet
- Discrete Fourier TransformDocument12 pagesDiscrete Fourier TransformnaruatNo ratings yet
- Lab4 ReportDocument19 pagesLab4 ReportVipulNo ratings yet
- Solving Poisson's Equation Using The FFTDocument9 pagesSolving Poisson's Equation Using The FFTJhon CerónNo ratings yet
- Lab 3 DSP. Discrete Fourier TransformDocument16 pagesLab 3 DSP. Discrete Fourier TransformTrí TừNo ratings yet
- EC8553 2marksDocument20 pagesEC8553 2marksSNo ratings yet
- The Sequence y (N) Is Obtained From IDFT of Y (K) - by Definition of IDFTDocument28 pagesThe Sequence y (N) Is Obtained From IDFT of Y (K) - by Definition of IDFTDrìftNo ratings yet
- DFT FFT NotesDocument41 pagesDFT FFT NotesManthan PandhareNo ratings yet
- DSP Module 3Document41 pagesDSP Module 3Ajay kumarNo ratings yet
- Fast Fourier TransformDocument13 pagesFast Fourier TransformMarwan Kanda'xadindaNo ratings yet
- Time and Frequency Analysis of Discrete-Time SignalsDocument15 pagesTime and Frequency Analysis of Discrete-Time SignalsVinay Krishna VadlamudiNo ratings yet
- Lab 9Document9 pagesLab 9Ahtisham aliNo ratings yet
- DSP 2 Marks Q&a1Document38 pagesDSP 2 Marks Q&a1shankarNo ratings yet
- BEE4413 Chapter 7Document20 pagesBEE4413 Chapter 7NUrul Aqilah MusNo ratings yet
- FFT ComputationDocument4 pagesFFT Computationjeyaseelan1982No ratings yet
- Fundamentals and Literature Review of Fourier Transform in Power Quality IssuesDocument14 pagesFundamentals and Literature Review of Fourier Transform in Power Quality IssuesFrew FrewNo ratings yet
- DSP Projects Call 9952749533Document84 pagesDSP Projects Call 9952749533setsindia3735No ratings yet
- W08 - D01 Computati212onal Methods in PhysicsDocument25 pagesW08 - D01 Computati212onal Methods in PhysicsKenn SenadosNo ratings yet
- National University of Modern Languages, Islamabad Communication System LabDocument7 pagesNational University of Modern Languages, Islamabad Communication System LabImMalikNo ratings yet
- Digital Signal Analysis and ApplicationsDocument13 pagesDigital Signal Analysis and ApplicationsGauravMishraNo ratings yet
- Experiment No: 7 AIM:-Write A Matlab Program To Find N-Point DFT Using A Fast Fourier TransformDocument4 pagesExperiment No: 7 AIM:-Write A Matlab Program To Find N-Point DFT Using A Fast Fourier TransformKissan PortalNo ratings yet
- تحويلات فورير في الفيزياء PDFDocument7 pagesتحويلات فورير في الفيزياء PDFhammoud100% (1)
- DSP-2 (DFS & DFT) (S)Document53 pagesDSP-2 (DFS & DFT) (S)Pratik PatelNo ratings yet
- AnandDocument11 pagesAnandNandani Candy DcostaNo ratings yet
- DSP Asignment1 - ID - 117020990036Document20 pagesDSP Asignment1 - ID - 117020990036FRANCK MOREL BENE FANKEMNo ratings yet
- Final SolDocument21 pagesFinal SolChuan HeNo ratings yet
- Title Computational Complexity of FFT Algorithm: ObjectiveDocument4 pagesTitle Computational Complexity of FFT Algorithm: ObjectiveSamjana KasajuNo ratings yet
- Lecture XI: The Fast Fourier Transform (FFT) Algorithm: Maxim RaginskyDocument13 pagesLecture XI: The Fast Fourier Transform (FFT) Algorithm: Maxim RaginskyjemarajNo ratings yet
- Experiment 2 Mat LabDocument4 pagesExperiment 2 Mat LabKapil GuptaNo ratings yet
- Chapter 5Document117 pagesChapter 5Phan Mạnh TườngNo ratings yet
- 188-Article Text-852-3-10-20221111Document13 pages188-Article Text-852-3-10-20221111YC ChanNo ratings yet
- Discrete-Time Fourier Analysis Discrete-Time Fourier AnalysisDocument37 pagesDiscrete-Time Fourier Analysis Discrete-Time Fourier AnalysisTrần Ngọc LâmNo ratings yet
- FourintDocument8 pagesFourintahmed awsiNo ratings yet
- (PPT) DFT DTFS and Transforms (Stanford)Document13 pages(PPT) DFT DTFS and Transforms (Stanford)Wesley GeorgeNo ratings yet
- DSP Lab Fourier Series and Transforms: EXP No:4Document19 pagesDSP Lab Fourier Series and Transforms: EXP No:4Jithin ThomasNo ratings yet
- FDSP SDocument22 pagesFDSP SYogesh Anand100% (1)
- Brief Notes On 1 Part of ME579: - Would Like To See X (F), The Fourier Transform of X (T), - C - We HaveDocument12 pagesBrief Notes On 1 Part of ME579: - Would Like To See X (F), The Fourier Transform of X (T), - C - We HaveWill BlackNo ratings yet
- DSP Sample Question - FinalDocument7 pagesDSP Sample Question - FinalMehta SparshNo ratings yet
- Chapter 5 - dsp1 - Co Thuc - Full, dsp1, Co Thuc, Xu Li Tin Hieu, BKDN, DSPDocument120 pagesChapter 5 - dsp1 - Co Thuc - Full, dsp1, Co Thuc, Xu Li Tin Hieu, BKDN, DSPXP2009No ratings yet
- Ece V Digital Signal Processing (10ec52) NotesDocument160 pagesEce V Digital Signal Processing (10ec52) NotesVijay SaiNo ratings yet
- A Tutorial of The Wavelet TransformDocument72 pagesA Tutorial of The Wavelet Transformss_barpanda8473No ratings yet
- Digital Signal Processing Two MarksDocument11 pagesDigital Signal Processing Two MarksDelphin ShibinNo ratings yet
- Course Notes v17Document82 pagesCourse Notes v17Iv ChenNo ratings yet
- Experiment 4 (AutoRecovered)Document33 pagesExperiment 4 (AutoRecovered)Tawsiful AlamNo ratings yet
- DSP NoteDocument7 pagesDSP Notemohammed fakehNo ratings yet
- Unit 22222Document23 pagesUnit 22222barithaNo ratings yet
- Chapter 4 Discrete Fourier TransformDocument65 pagesChapter 4 Discrete Fourier TransformMuhd HafizuddinNo ratings yet
- Name: Adibah Binti Mat Khairuldin MATRIC NO: 156734 Supervisor: DR Norazak SenuDocument31 pagesName: Adibah Binti Mat Khairuldin MATRIC NO: 156734 Supervisor: DR Norazak Senuceroja_chanNo ratings yet
- Discrete Radon TransformDocument6 pagesDiscrete Radon Transformceroja_chanNo ratings yet
- Notes Predator Prey PDFDocument8 pagesNotes Predator Prey PDFMate ŠušnjarNo ratings yet
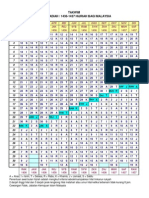
- Takwim 2015 PDFDocument1 pageTakwim 2015 PDFMuhd HanisNo ratings yet
- PollutionDocument2 pagesPollutionceroja_chanNo ratings yet
- A Prominent Malaysian LeaderDocument2 pagesA Prominent Malaysian LeaderAdawiyah AdnanNo ratings yet
- First Malaysian To Go Into SpaceDocument2 pagesFirst Malaysian To Go Into Spaceceroja_chanNo ratings yet
- PMR Modul English ClosestDocument11 pagesPMR Modul English ClosestHaslina ZakariaNo ratings yet
- Cudnn LibraryDocument109 pagesCudnn LibraryiamceresNo ratings yet
- Page 2Document43 pagesPage 2mariaNo ratings yet
- Lab Task 2Document12 pagesLab Task 2Skand Vijay 18BEC0089No ratings yet
- (1991) Hornik (Neural Netw.)Document7 pages(1991) Hornik (Neural Netw.)MaxNo ratings yet
- A Convolution and Product Theorem For The Fractional Fourier Transform, ZayedDocument3 pagesA Convolution and Product Theorem For The Fractional Fourier Transform, Zayedsserbess4875No ratings yet
- Convolutional Neural NetworksDocument31 pagesConvolutional Neural NetworksAamir ayub100% (1)
- Ec6511 DSP Lab ManualDocument156 pagesEc6511 DSP Lab Manualramadossapece100% (5)
- Evolving Artificial Neural Networks With Feedback - 2020 - Neural NetworksDocument10 pagesEvolving Artificial Neural Networks With Feedback - 2020 - Neural NetworksAssad AssadNo ratings yet
- Slide-2.2 Discrete Time Linear Time Invariant (LTI) System-2Document94 pagesSlide-2.2 Discrete Time Linear Time Invariant (LTI) System-2musaNo ratings yet
- 20 5 Convolution TheoremDocument8 pages20 5 Convolution Theoremfatcode27No ratings yet
- Ch02 Time-Domain Representations of LTI Systems Compatibility ModeDocument120 pagesCh02 Time-Domain Representations of LTI Systems Compatibility ModeChristian Paul Manalo TaburadaNo ratings yet
- A Proposal On Machine Learning Via Dynamical SystemsDocument11 pagesA Proposal On Machine Learning Via Dynamical SystemsPol MestresNo ratings yet
- Laplace Transform and ApplicationDocument61 pagesLaplace Transform and ApplicationafaqihudinNo ratings yet
- +martin Marinov - Remote Video Eavesdropping Using A Software-De - Ned Radio PlatformDocument78 pages+martin Marinov - Remote Video Eavesdropping Using A Software-De - Ned Radio Platformalex logNo ratings yet
- MSC Mathematics 2014Document21 pagesMSC Mathematics 2014Muralikrishna SingamaneniNo ratings yet
- Basic Digital Signal Processing Matlab CodesDocument10 pagesBasic Digital Signal Processing Matlab Codesnitishsp100% (1)
- Principles of Digital Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersDocument11 pagesPrinciples of Digital Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersM.V. TV0% (1)
- Project Report FINGER PRINTDocument43 pagesProject Report FINGER PRINTPravat SatpathyNo ratings yet
- EECE 301 Note Set 7 DT System RecursionDocument10 pagesEECE 301 Note Set 7 DT System RecursionFrançois DemanoNo ratings yet
- Laplace Transforms: Ajith S KurupDocument16 pagesLaplace Transforms: Ajith S KuruprashidtajarNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Fast Car Crash Detection in Video: V. Machaca Arceda, E. Laura RiverosDocument6 pagesFast Car Crash Detection in Video: V. Machaca Arceda, E. Laura RiverosSurya PeriasamyNo ratings yet
- Ma 3001Document3 pagesMa 3001Anuradha RumeshNo ratings yet
- Unit 2aDocument31 pagesUnit 2aAkshaya GopalakrishnanNo ratings yet
- OpenCL Heterogeneous Parallel Program For Gaussian FilterDocument8 pagesOpenCL Heterogeneous Parallel Program For Gaussian Filterpi194043No ratings yet
- State-Space Modeling (SSM)Document11 pagesState-Space Modeling (SSM)Diyanosh HedayatiNo ratings yet
- ELEC301x Review Lecture NotesDocument12 pagesELEC301x Review Lecture NoteserdoganaaaNo ratings yet
- S 20 ECE SyllabusDocument188 pagesS 20 ECE Syllabus133No ratings yet
- MOD4 DiscretesignalsDocument12 pagesMOD4 DiscretesignalsMark Nadala ReveloNo ratings yet
- Lesson1Notes PDFDocument32 pagesLesson1Notes PDFMohamed SaidNo ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryFrom EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryNo ratings yet
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)From EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)No ratings yet
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkFrom EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkRating: 5 out of 5 stars5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathFrom EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathRating: 5 out of 5 stars5/5 (1)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (80)
- Magic Multiplication: Discover the Ultimate Formula for Fast MultiplicationFrom EverandMagic Multiplication: Discover the Ultimate Formula for Fast MultiplicationNo ratings yet