You might also like
- Δ PrefDocument1 pageΔ PrefChakravarthy ChNo ratings yet
- Appendix BDocument4 pagesAppendix BChakravarthy ChNo ratings yet
- Curriculum VitaeDocument2 pagesCurriculum VitaeChakravarthy ChNo ratings yet
- Royal RevoltDocument1 pageRoyal RevoltChakravarthy ChNo ratings yet
- 3 Phase Half Controlled ConverterDocument5 pages3 Phase Half Controlled ConverterChakravarthy ChNo ratings yet
- Bhel 2.2.2Document55 pagesBhel 2.2.2Chakravarthy ChNo ratings yet
- Paper Presentation On Working Speed BreakersDocument16 pagesPaper Presentation On Working Speed BreakersChakravarthy ChNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Sic Mosfets in Hard-Switching Bidirectional DC/DC ConvertersDocument5 pagesSic Mosfets in Hard-Switching Bidirectional DC/DC ConvertersBogdan KstNo ratings yet
- SmartCtrl User ManualDocument161 pagesSmartCtrl User ManualHer OliveiraNo ratings yet
- Single Phase Viennna RectifierDocument103 pagesSingle Phase Viennna RectifierDhivagar NamakkalNo ratings yet
- Final Call For Chapter - UpdatedDocument1 pageFinal Call For Chapter - UpdatedRAJANNo ratings yet
- Automotive 12-And 24-V Battery Input Protection Reference DesignDocument37 pagesAutomotive 12-And 24-V Battery Input Protection Reference DesignfourkarmaNo ratings yet
- A Perpetual LightDocument7 pagesA Perpetual Lightsuherlan endanNo ratings yet
- LCD221SD Service ManualDocument41 pagesLCD221SD Service Manual1cvbnmNo ratings yet
- Rationalization Energy Based On Automatic Street Lighting SystemDocument5 pagesRationalization Energy Based On Automatic Street Lighting Systemhamza mandlwiNo ratings yet
- Compendium2020 PDFDocument69 pagesCompendium2020 PDFronyjohnson100% (1)
- K220DSF SVC Manual V1.0 160826Document99 pagesK220DSF SVC Manual V1.0 160826GlimasNo ratings yet
- Informe Convetidor Flyback Lazo Cerrado CopyDocument7 pagesInforme Convetidor Flyback Lazo Cerrado CopyJhonny MoyonNo ratings yet
- Skill-Lync EV - Detailed SyllabusDocument18 pagesSkill-Lync EV - Detailed SyllabusAbhrajit Nath100% (1)
- Comprehensive Review and Comparison of Single-Phase Grid-Tied Photovoltaic MicroinvertersDocument19 pagesComprehensive Review and Comparison of Single-Phase Grid-Tied Photovoltaic MicroinvertersJesus Alonso DiazNo ratings yet
- 2nd Generation LLC Current Resonant Control IC, "FA6A00N Series"Document7 pages2nd Generation LLC Current Resonant Control IC, "FA6A00N Series"Moch Yosef Indra RiznoeNo ratings yet
- TL 5001 CDocument23 pagesTL 5001 Cgronci5410No ratings yet
- A Comprehensive Review of PV Driven Electrical Motors PDFDocument26 pagesA Comprehensive Review of PV Driven Electrical Motors PDFShubhamNo ratings yet
- Power Electronics Drives U3Document66 pagesPower Electronics Drives U3Ruvenderan SuburamaniamNo ratings yet
- Sliding Mode Control of Power Converters and Electrical DrivesDocument260 pagesSliding Mode Control of Power Converters and Electrical Drivesleoh1223No ratings yet
- DC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Document11 pagesDC and AC Motor Drives: by John Wiley & Sons, Inc. Chapter 2 Power Semiconductor Switches: An Overview 2-1 2-1Aslam MohammadNo ratings yet
- Double Output Luo-ConvertersDocument19 pagesDouble Output Luo-ConvertersYohannes GetinetNo ratings yet
- CH 3 ProblemsDocument3 pagesCH 3 ProblemsDiogo Rodrigues0% (1)
- Infineon Selection-Guide High ResDocument86 pagesInfineon Selection-Guide High Resnaiad09No ratings yet
- BM 81004 MuvDocument52 pagesBM 81004 MuvHamza Abbasi AbbasiNo ratings yet
- Training de Pioneer Plasma 6 GeneracinDocument62 pagesTraining de Pioneer Plasma 6 GeneracinToni Martin SebéNo ratings yet
- Energies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadDocument17 pagesEnergies: FPGA-Based Controller For A Hybrid Grid-Connected PV/Wind/Battery Power System With AC LoadmohanNo ratings yet
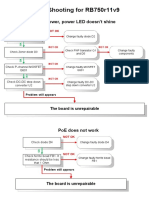
- Troubleshooting For Rb750R11V9: No Power, Power Led Doesn'T ShineDocument6 pagesTroubleshooting For Rb750R11V9: No Power, Power Led Doesn'T Shinejocimar1000No ratings yet
- Tidues 0 CDocument86 pagesTidues 0 CSampathNo ratings yet
- Steady-State Equivalent Circuit Modeling, Losses, and EfficiencyDocument20 pagesSteady-State Equivalent Circuit Modeling, Losses, and EfficiencyhassanNo ratings yet
- YatsfyafsyyDocument18 pagesYatsfyafsyysreenu mNo ratings yet
- Portable Nano-Hydro Power Generator for DC HouseDocument56 pagesPortable Nano-Hydro Power Generator for DC HouseRocendo AstilleroNo ratings yet