You might also like
- Secret Communication Combining Cryptography and SteganographyDocument11 pagesSecret Communication Combining Cryptography and SteganographyAbdurrahman HazerNo ratings yet
- 10 1109icitisee 2017 8285505Document6 pages10 1109icitisee 2017 8285505Abdurrahman HazerNo ratings yet
- Quartus II IntroductionDocument34 pagesQuartus II IntroductionAbdurrahman HazerNo ratings yet
- Ee501 Jordan FormDocument17 pagesEe501 Jordan FormJohn LockeNo ratings yet
- T S LSB C: EXT Teganography Using Insertion Method Along With Haos TheoryDocument5 pagesT S LSB C: EXT Teganography Using Insertion Method Along With Haos TheoryAbdurrahman HazerNo ratings yet
- SyllabusDocument1 pageSyllabusAbdurrahman HazerNo ratings yet
- A 3-Color Theorem On Plane Graphs Without 5-Circuits: Bao Gang XUDocument4 pagesA 3-Color Theorem On Plane Graphs Without 5-Circuits: Bao Gang XUAbdurrahman HazerNo ratings yet
- Proposed System For Data Hiding Using Cryptography and SteganographyDocument8 pagesProposed System For Data Hiding Using Cryptography and SteganographyAdarsh UttarkarNo ratings yet
- Laser Speckle Contrast Imaging: Tim Starling'S BlogDocument6 pagesLaser Speckle Contrast Imaging: Tim Starling'S BlogAbdurrahman HazerNo ratings yet
- SenseandSensibility 3Document30 pagesSenseandSensibility 3Abdurrahman HazerNo ratings yet
- Metric and Normed SpacesDocument34 pagesMetric and Normed Spaceshyd arnesNo ratings yet
- Week13 14Document21 pagesWeek13 14Abdurrahman HazerNo ratings yet
- LfreichnotesfuncanDocument86 pagesLfreichnotesfuncanJavierDanielNo ratings yet
- 5 Properties of Linear, Time-Invariant Systems: Solutions To Recommended ProblemsDocument8 pages5 Properties of Linear, Time-Invariant Systems: Solutions To Recommended ProblemsLenin KumarNo ratings yet
- Gaziyok NotdonusumDocument3 pagesGaziyok NotdonusumAbdurrahman HazerNo ratings yet
- Application of Self Controlling Software Approach To Reactive Tabu SearchDocument9 pagesApplication of Self Controlling Software Approach To Reactive Tabu SearchAbdurrahman HazerNo ratings yet
- Summarizing YDS Paragraph Completion SetsDocument3 pagesSummarizing YDS Paragraph Completion SetsAbdurrahman HazerNo ratings yet
- Week13 14Document21 pagesWeek13 14Abdurrahman HazerNo ratings yet
- Summarizing YDS Paragraph Completion SetsDocument3 pagesSummarizing YDS Paragraph Completion SetsAbdurrahman HazerNo ratings yet
- YDS SET CLOZE TESTDocument4 pagesYDS SET CLOZE TESTAbdurrahman HazerNo ratings yet
- Summit: Yds Set Vocabulary BookDocument1 pageSummit: Yds Set Vocabulary BookAbdurrahman HazerNo ratings yet
- Summit: Yds Set Vocabulary BookDocument1 pageSummit: Yds Set Vocabulary BookAbdurrahman HazerNo ratings yet
- Vocabulary Book - Test 6Document1 pageVocabulary Book - Test 6Abdurrahman HazerNo ratings yet
- Vocabulary Book - Test 8Document2 pagesVocabulary Book - Test 8Abdurrahman HazerNo ratings yet
- Vocabulary Book - Test 7Document1 pageVocabulary Book - Test 7Abdurrahman HazerNo ratings yet
- Vocabulary Book - Test 2Document1 pageVocabulary Book - Test 2Abdurrahman HazerNo ratings yet
- Vocabulary Book - Test 9Document1 pageVocabulary Book - Test 9Abdurrahman HazerNo ratings yet
- Vocabulary Book - Test 5Document1 pageVocabulary Book - Test 5Abdurrahman HazerNo ratings yet
- YDS Vocabulary Book Test 3Document1 pageYDS Vocabulary Book Test 3Abdurrahman HazerNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- pd1185 Fire CodeDocument3 pagespd1185 Fire CodeCamille MangaranNo ratings yet
- Pass4sure 200-120 PDF DownloadDocument8 pagesPass4sure 200-120 PDF DownloadEleanor19No ratings yet
- Electric Rolling Bridge, Scientific American 24 August 1889 p120Document2 pagesElectric Rolling Bridge, Scientific American 24 August 1889 p120Rm1262No ratings yet
- Maximo Sandbox SettingsDocument6 pagesMaximo Sandbox SettingsChandra SekharNo ratings yet
- E 20925Document214 pagesE 20925Ahmed ElshowbkeyNo ratings yet
- BYG Опросный лист на режущую кромкуDocument51 pagesBYG Опросный лист на режущую кромкуMMM-MMMNo ratings yet
- Making Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyDocument2 pagesMaking Your Chain Run For Longer: Effective Chain Maintenance Advice From Renold JeffreyCương Phạm NgọcNo ratings yet
- Autodesk 2010 Product Key PDFDocument6 pagesAutodesk 2010 Product Key PDFDragon NestNo ratings yet
- Acoustic ManualDocument88 pagesAcoustic ManualAlex Feria100% (1)
- Sublimation of CaffeineDocument3 pagesSublimation of CaffeineNabil ShaikhNo ratings yet
- Room Air Conditioner Owner's Manual GuideDocument19 pagesRoom Air Conditioner Owner's Manual GuideMunteanu LucianNo ratings yet
- WT Lab ManualDocument44 pagesWT Lab ManualVenkatanagasudheer Thummapudi100% (1)
- CHAPTER 2 4.0 Three Phase SystemsDocument41 pagesCHAPTER 2 4.0 Three Phase SystemsMUHAMMAD ALIFF DANIAL RAZMINo ratings yet
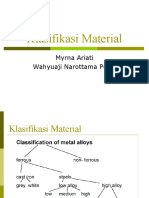
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocument49 pagesKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07No ratings yet
- Furuno GMDSS Installation Manual PDFDocument64 pagesFuruno GMDSS Installation Manual PDFEric PskdNo ratings yet
- Sunscreen FabricDocument36 pagesSunscreen Fabricfakhrurr44No ratings yet
- Amerlock 400CDocument5 pagesAmerlock 400CbalangceNo ratings yet
- Microwave Engineering - E-H Plane TeeDocument6 pagesMicrowave Engineering - E-H Plane TeeJoker FNo ratings yet
- A967517734 - 24017 - 22 - 2018 - 10. Header Linked List (2 Files Merged) PDFDocument25 pagesA967517734 - 24017 - 22 - 2018 - 10. Header Linked List (2 Files Merged) PDFKiran KumarNo ratings yet
- Performance of tuned mass dampers under wind loadsDocument13 pagesPerformance of tuned mass dampers under wind loadsDhirendra Kumar PandeyNo ratings yet
- GSM Channels LogicalDocument8 pagesGSM Channels LogicalbeetelnutsNo ratings yet
- BPC BW HierarchyDocument8 pagesBPC BW HierarchyJulio RafaelNo ratings yet
- HP Fortify Higher Order Tech PrevDocument2 pagesHP Fortify Higher Order Tech PrevanbuselvangNo ratings yet
- Landscape - Cut & Fill StopingDocument24 pagesLandscape - Cut & Fill StopingRAJIV VINOD CONJEEVARAM 1961714No ratings yet
- Evaporation: (I) Vapour PressureDocument15 pagesEvaporation: (I) Vapour Pressurevenka07No ratings yet
- Nba Sar B.tech. Electronics UgDocument171 pagesNba Sar B.tech. Electronics UgSaurabh BhiseNo ratings yet
- Motivation and Leadership in Engineering ManagementDocument24 pagesMotivation and Leadership in Engineering ManagementChen Marie DyNo ratings yet
- Cava v6 1x Install enDocument29 pagesCava v6 1x Install enWael SalahNo ratings yet
- 2SC1344, 2SC1345: Silicon NPN EpitaxialDocument9 pages2SC1344, 2SC1345: Silicon NPN EpitaxialrolandseNo ratings yet
- Improved M16A2 - A3 - A4 Zero TargetDocument6 pagesImproved M16A2 - A3 - A4 Zero Targetbeetho1990No ratings yet