You might also like
- Examen Final CAPDocument22 pagesExamen Final CAPRAUL . ARAYA GUTIERREZNo ratings yet
- Practica 1 Laboratorio Control AnalogicoDocument18 pagesPractica 1 Laboratorio Control AnalogicoDaniel GalarzaNo ratings yet
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónFrom EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónRating: 5 out of 5 stars5/5 (1)
- Control PIDDocument6 pagesControl PIDKenyo Manuel Miranda QuispeNo ratings yet
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- Diseño de controladores P, PI y PID para un sistema de tercer ordenDocument18 pagesDiseño de controladores P, PI y PID para un sistema de tercer ordenBrayan Leonardo Garcia100% (1)
- Puesta en marcha de sistemas de automatización industrial. ELEM0311From EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Rating: 3 out of 5 stars3/5 (1)
- Controlador Pid para Un Sistema de SegundoDocument11 pagesControlador Pid para Un Sistema de SegundoLuz Elena M. PossoNo ratings yet
- Sistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208From EverandSistemas de control integrados en bienes de equipo y maquinaria industrial y elaboración de la documentación técnica. FMEE0208No ratings yet
- Diseño de un sistema de control de temperatura con MATLAB y SimulinkDocument9 pagesDiseño de un sistema de control de temperatura con MATLAB y SimulinkHector J. Moscoso RoqueNo ratings yet
- Youblisher Com 240416 Controlador Pid para Sistema de Segundo OrdenDocument20 pagesYoublisher Com 240416 Controlador Pid para Sistema de Segundo OrdenLubeck Abraham Huaman PonceNo ratings yet
- Control PID Labview Motor DCDocument10 pagesControl PID Labview Motor DCWalter Mamani CcasaNo ratings yet
- UF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasFrom EverandUF2246 - Reparación de pequeños electrodomésticos y herramientas eléctricasRating: 2.5 out of 5 stars2.5/5 (3)
- Fase 4 Gerardo Rojas CDocument10 pagesFase 4 Gerardo Rojas CgerardoNo ratings yet
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaFrom EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaNo ratings yet
- AplicacionesdeNeumatica ODocument130 pagesAplicacionesdeNeumatica OFrancisco Javier Vera TorresNo ratings yet
- Lab 2Document10 pagesLab 2ZOILA ELIANA COAQUIRA MAMANINo ratings yet
- Informe Final CDDocument29 pagesInforme Final CDJuan Elmer Camarena QuintoNo ratings yet
- Reporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Document22 pagesReporte Proyectopdf20200205 25342 Apx0ty With Cover Page v2Franco StieblerNo ratings yet
- Predictivo Adaptativo RobustoDocument24 pagesPredictivo Adaptativo RobustoGeorgeMarrinesNo ratings yet
- ControlTemperaturaLabVIEWATMEL328PDocument3 pagesControlTemperaturaLabVIEWATMEL328PAlan RamosNo ratings yet
- Informe II Automatizacion Industrial I PDFDocument6 pagesInforme II Automatizacion Industrial I PDFPablo ParreñoNo ratings yet
- Laboratorio N6 Control en Cascada Continuacion.111111111Document15 pagesLaboratorio N6 Control en Cascada Continuacion.111111111Joseph CanalesNo ratings yet
- Modelo de Resumen de ProyectosDocument32 pagesModelo de Resumen de ProyectosNekzcore EvanzNo ratings yet
- Aplicaciones de Hidráulica - PLC: FluidosDocument117 pagesAplicaciones de Hidráulica - PLC: FluidosMi LuanaNo ratings yet
- Diseño y Sintonizador de Controlador PIDDocument10 pagesDiseño y Sintonizador de Controlador PIDAlonso BeltranNo ratings yet
- Diseño y Sintonizador de Controlador PIDDocument10 pagesDiseño y Sintonizador de Controlador PIDAlonso BeltranNo ratings yet
- Evaluación Final - Ingeniería Eléctrica ALEXIS MONTOYADocument6 pagesEvaluación Final - Ingeniería Eléctrica ALEXIS MONTOYADanna Avila RubinaNo ratings yet
- Fase 4 JulianRsDocument14 pagesFase 4 JulianRsJhon Edison Vargas CardonaNo ratings yet
- Plantilla Informe ProyectoDocument21 pagesPlantilla Informe ProyectoDaniel Sanchez MendozaNo ratings yet
- Control de estanques en serie con PIDDocument21 pagesControl de estanques en serie con PIDMatias Eduardo Fuentealba PizarroNo ratings yet
- Desarrollo e implementación de sistemas de control en banco didáctico de refrigeraciónDocument118 pagesDesarrollo e implementación de sistemas de control en banco didáctico de refrigeraciónFRBM2100% (1)
- Practica 2 PLCDocument15 pagesPractica 2 PLCErika LopezNo ratings yet
- Anfred Angelis Cuenca Leiva - Und - 3Document13 pagesAnfred Angelis Cuenca Leiva - Und - 3Anfred Angelis Cuenca leivaNo ratings yet
- Modelo Del Controlador PidDocument5 pagesModelo Del Controlador PidalocamasaNo ratings yet
- FCT Ace 1Document8 pagesFCT Ace 1Adrian NetoNo ratings yet
- Control de motores DC con lógica digital - Parte 2Document9 pagesControl de motores DC con lógica digital - Parte 2rodrigo rivera quispeNo ratings yet
- Practica 11Document9 pagesPractica 11Daniel S. Molina TorresNo ratings yet
- Controlador PID para Un Motor DCDocument4 pagesControlador PID para Un Motor DCJ Andres L CortesNo ratings yet
- Lsca P11 2019BDocument3 pagesLsca P11 2019BDennys VillavicencioNo ratings yet
- Practica 3Document2 pagesPractica 3Diego ValladolidNo ratings yet
- Practica de Semaforo 3 TimersDocument19 pagesPractica de Semaforo 3 TimersYONATAN DANIEL ARZOLA NAVARRONo ratings yet
- Lab 2Document9 pagesLab 2ZOILA ELIANA COAQUIRA MAMANINo ratings yet
- FINAL 2 Sitema de Control 2 2.2Document19 pagesFINAL 2 Sitema de Control 2 2.2David LiviasNo ratings yet
- Proyecto InvernaderoDocument23 pagesProyecto InvernaderoGil Fernando Dueñas Prieto100% (1)
- Calibración de controladores PID con métodos de Ziegler-Nichols y Chien-Hrones-ReswickDocument14 pagesCalibración de controladores PID con métodos de Ziegler-Nichols y Chien-Hrones-ReswickArturo Hernández MoralesNo ratings yet
- Sintonización de ControladoresDocument7 pagesSintonización de Controladoresvictorino.cr02No ratings yet
- Proyecto-Corto-Pamh ProyectoCorto I 2020 PAMHDocument5 pagesProyecto-Corto-Pamh ProyectoCorto I 2020 PAMHJorge Rodríguez EsquivelNo ratings yet
- Guia s7200 1Document5 pagesGuia s7200 1Jose FranciscoNo ratings yet
- Posible Informe 4Document14 pagesPosible Informe 4valentronicaNo ratings yet
- Javier Tenesaca - Proyecto Control PIDDocument6 pagesJavier Tenesaca - Proyecto Control PIDJavier Tenesaca Ch.No ratings yet
- Lab09 Sintonización PID Metodo de Oscilacion - PDF 1Document12 pagesLab09 Sintonización PID Metodo de Oscilacion - PDF 1Darlin AlfaroNo ratings yet
- TrabajoFinal EDEPOTENCIA TemporizacionFases+Píc16f877ADocument13 pagesTrabajoFinal EDEPOTENCIA TemporizacionFases+Píc16f877AJhoel René Mamani HuancaNo ratings yet
- Laboratorio Cuatro Control 2eeeeDocument9 pagesLaboratorio Cuatro Control 2eeeeEmilio LovatonNo ratings yet
- CSTRDocument7 pagesCSTRRoyer Palomino RodriguezNo ratings yet
- Sintonía de controladores PID por el método de curva de reacción de Zieglers y NicholsDocument13 pagesSintonía de controladores PID por el método de curva de reacción de Zieglers y NicholsDany RomeroNo ratings yet
- LABORATORIO DE CONTROL DE PROCESOS - Coeficiente de Una VálvulaDocument3 pagesLABORATORIO DE CONTROL DE PROCESOS - Coeficiente de Una VálvulaAlvaro Michel Castillo QuispehuancaNo ratings yet
- Determinación del punto de ebullición de compuestos orgánicosDocument2 pagesDeterminación del punto de ebullición de compuestos orgánicosAlvaro Michel Castillo QuispehuancaNo ratings yet
- Ejercicio 4.36.b Transferencia de CalorDocument2 pagesEjercicio 4.36.b Transferencia de CalorAlvaro Michel Castillo QuispehuancaNo ratings yet
- Ley de Henry y RaoultDocument2 pagesLey de Henry y RaoultAlvaro Michel Castillo Quispehuanca100% (2)
- Práctica de Laboratorio Nº1-Solubilidad de Compuestos OrgánicosDocument3 pagesPráctica de Laboratorio Nº1-Solubilidad de Compuestos OrgánicosAlvaro Michel Castillo Quispehuanca50% (2)
- Diapositivas Finales v00Document107 pagesDiapositivas Finales v00Alvaro Michel Castillo QuispehuancaNo ratings yet
- Laboratorio de Reología de La Pasta Del TomateDocument8 pagesLaboratorio de Reología de La Pasta Del TomateAlvaro Michel Castillo QuispehuancaNo ratings yet
- Práctica de Laboratorio #2-AbsorciónDocument2 pagesPráctica de Laboratorio #2-AbsorciónAlvaro Michel Castillo QuispehuancaNo ratings yet
- Metabolismo en LevadurasDocument17 pagesMetabolismo en LevadurasAlvaro Michel Castillo QuispehuancaNo ratings yet
- Calculo de Hidro Neumatico GomezmunozmoisesDocument0 pagesCalculo de Hidro Neumatico GomezmunozmoisesVictor Hugo Mamani MamaniNo ratings yet
- Práctica Nº1-Elaboración de MermeladasDocument4 pagesPráctica Nº1-Elaboración de MermeladasAlvaro Michel Castillo QuispehuancaNo ratings yet
- Desinfeccion - Cloracion PDFDocument18 pagesDesinfeccion - Cloracion PDFRaúl PintoNo ratings yet
- Diseño de producción de amoniaco a partir de gas naturalDocument23 pagesDiseño de producción de amoniaco a partir de gas naturalAlvaro Michel Castillo QuispehuancaNo ratings yet
- Expo. CentrifugaciónDocument13 pagesExpo. CentrifugaciónAlvaro Michel Castillo QuispehuancaNo ratings yet
- Calculo de Hidro Neumatico GomezmunozmoisesDocument0 pagesCalculo de Hidro Neumatico GomezmunozmoisesVictor Hugo Mamani MamaniNo ratings yet
- Reología del kétchup y salsa de tomateDocument10 pagesReología del kétchup y salsa de tomateAlvaro Michel Castillo QuispehuancaNo ratings yet
- CENTRIFUGACIÓNDocument7 pagesCENTRIFUGACIÓNAlvaro Michel Castillo QuispehuancaNo ratings yet
- 1.a Presentación de Producción de AmoniacoDocument21 pages1.a Presentación de Producción de AmoniacoJaen SaurNo ratings yet
- NTP 111.011-2006Document57 pagesNTP 111.011-2006metrotecNo ratings yet
- CENTRIFUGACIÓNDocument7 pagesCENTRIFUGACIÓNAlvaro Michel Castillo QuispehuancaNo ratings yet
- 1 C 2Document1 page1 C 2Alexis MasideNo ratings yet
- Expo. CentrifugaciónDocument13 pagesExpo. CentrifugaciónAlvaro Michel Castillo QuispehuancaNo ratings yet
- Simulación sensores nivel separación petróleo-agua válvulas LabviewDocument6 pagesSimulación sensores nivel separación petróleo-agua válvulas LabviewAlvaro Michel Castillo QuispehuancaNo ratings yet
- Ecuación de Sidney-Young TebDocument1 pageEcuación de Sidney-Young TebAlvaro Michel Castillo QuispehuancaNo ratings yet
- Identificación de Peligros y Evaluación de RiesgosDocument1 pageIdentificación de Peligros y Evaluación de RiesgosAlvaro Michel Castillo QuispehuancaNo ratings yet
- Malteadodecebada 16925Document7 pagesMalteadodecebada 16925Ivaans RuierrNo ratings yet
- Apuntes de FermentacionDocument18 pagesApuntes de FermentacionAlvaro Michel Castillo QuispehuancaNo ratings yet
- Sostenibilidad, Poblacion y Prob. Amb 2011Document75 pagesSostenibilidad, Poblacion y Prob. Amb 2011Alvaro Michel Castillo QuispehuancaNo ratings yet
- Tipos de PlasticosDocument7 pagesTipos de PlasticosAlvaro Michel Castillo QuispehuancaNo ratings yet
- ModbusDocument17 pagesModbusGonzalo Tapia100% (1)
- Los Humedales de VentanillaDocument2 pagesLos Humedales de VentanillaAngieLlamoccaNo ratings yet
- Aplicacion de Bond-Graph A MecanicaDocument26 pagesAplicacion de Bond-Graph A Mecanicajmnejer100% (1)
- Perfil Del Ingeniero en Higiene y SeguridadDocument4 pagesPerfil Del Ingeniero en Higiene y SeguridadJhonny Picone Briceño100% (2)
- Proyecto de Tesis - Lean ConstructionDocument5 pagesProyecto de Tesis - Lean ConstructionCristhian Omar Palomino VillanuevaNo ratings yet
- Informacion Ingles 1 PDFDocument15 pagesInformacion Ingles 1 PDFJose Tomas Vergara DiazNo ratings yet
- JFLAP introducción autómatasDocument7 pagesJFLAP introducción autómatasCarlos Andrés VivasNo ratings yet
- Arquitectura Tardia de F.L. WRIGHT PDFDocument28 pagesArquitectura Tardia de F.L. WRIGHT PDFfederico7davide7carnNo ratings yet
- Temporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosDocument3 pagesTemporizadores ENYA Serie - Retardos, Impulsos y Ciclos SimétricosClaudio Patricio Zarate VidalNo ratings yet
- TRABAJOFINAL TR1 Calidad Total)Document7 pagesTRABAJOFINAL TR1 Calidad Total)Renan DroidNo ratings yet
- Taller 2Document16 pagesTaller 2alejo388167% (9)
- QS9000Document50 pagesQS9000Sergio BoillosNo ratings yet
- Play ComicDocument7 pagesPlay ComicVictor AlcoNo ratings yet
- Accesorios de La Tubería de RevestimientoDocument15 pagesAccesorios de La Tubería de Revestimientojohnrofa100% (1)
- Competencias Del Ingeniero BiomédicoDocument10 pagesCompetencias Del Ingeniero BiomédicoSandy Paola RojasNo ratings yet
- PTF SDT Co 3f Sobre Ruedas 300kva 500kva S 15kvDocument1 pagePTF SDT Co 3f Sobre Ruedas 300kva 500kva S 15kvCristhian CamargoNo ratings yet
- Formato Entrevista InicialDocument4 pagesFormato Entrevista InicialHANNYI ALEJANDRA VELASCO PUERTASNo ratings yet
- Bin Lifter HKV ESDocument4 pagesBin Lifter HKV ESEli BoscanNo ratings yet
- Evaluación PDFDocument11 pagesEvaluación PDFquequieresqueNo ratings yet
- Manual NemosDocument35 pagesManual NemosjavivivivNo ratings yet
- Levantamiento topográfico con poligonal cerrada por ángulos de flexiónDocument12 pagesLevantamiento topográfico con poligonal cerrada por ángulos de flexiónMilagros RamosNo ratings yet
- OF y CMO del marco curricular chilenoDocument3 pagesOF y CMO del marco curricular chilenoFrank Honores BarriosNo ratings yet
- Decreto 60/02Document23 pagesDecreto 60/02Nathalie MeloNo ratings yet
- Obras Portuarias Problemas y Soluciones en El HormigonDocument27 pagesObras Portuarias Problemas y Soluciones en El HormigongustavoNo ratings yet
- Actividad de Semana 1Document3 pagesActividad de Semana 1MaylethReyesNo ratings yet
- Sistema de tuberías de baja presiónDocument5 pagesSistema de tuberías de baja presiónSusanNo ratings yet
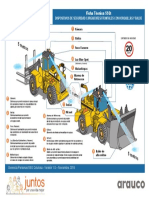
- Ficha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeDocument1 pageFicha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeCamilo Milo100% (1)
- Aplicaciones de Circuitos RC, RL y Del Transistor Como Elemento de Conmutación (Práctica)Document5 pagesAplicaciones de Circuitos RC, RL y Del Transistor Como Elemento de Conmutación (Práctica)Siul ReivajNo ratings yet
- Capítulo Viii - Eticidad de La ProconcepcionDocument13 pagesCapítulo Viii - Eticidad de La ProconcepcionEddy LestalNo ratings yet
- Matriz Equipos de Proteccion Contra CaidasDocument5 pagesMatriz Equipos de Proteccion Contra CaidasmayraGP100% (1)
- University of Chicago Press Fall 2009 CatalogueFrom EverandUniversity of Chicago Press Fall 2009 CatalogueRating: 5 out of 5 stars5/5 (1)
- University of Chicago Press Fall 2009 Distributed TitlesFrom EverandUniversity of Chicago Press Fall 2009 Distributed TitlesRating: 1 out of 5 stars1/5 (1)