You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Free Standing Tension StructuresDocument255 pagesFree Standing Tension StructuresJoaquin VieraNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- NewScientist - Poster of RealityDocument1 pageNewScientist - Poster of Realityoaky100% (1)
- Calibration of A Pressure GaugeDocument7 pagesCalibration of A Pressure Gaugeneutron_8788% (17)
- PVP2008-Hinnant and PaulinDocument50 pagesPVP2008-Hinnant and PaulinFeliper65No ratings yet
- HVAC Overview of The Underfloor Air Distribution (UFAD) PDFDocument49 pagesHVAC Overview of The Underfloor Air Distribution (UFAD) PDFnitin guptaNo ratings yet
- HVAC - Space Heating SystemsDocument114 pagesHVAC - Space Heating Systemsnitin guptaNo ratings yet
- (1967) How Safe Are Our Large Reinforced Concrete Beams PDFDocument14 pages(1967) How Safe Are Our Large Reinforced Concrete Beams PDFMohammad AshrafyNo ratings yet
- Identification of Organic and Inorganic Compounds by SpectrosDocument79 pagesIdentification of Organic and Inorganic Compounds by SpectrosAin SkNo ratings yet
- MODE Getting StartedDocument87 pagesMODE Getting StartedDr-Mandeep SinghNo ratings yet
- Fun They Had Questions Wih AnswersDocument4 pagesFun They Had Questions Wih Answersnitin guptaNo ratings yet
- Basic of DesigningDocument9 pagesBasic of Designingnitin guptaNo ratings yet
- French Revolution Part 2Document9 pagesFrench Revolution Part 2nitin guptaNo ratings yet
- Worksheet On Why DemocracyDocument1 pageWorksheet On Why Democracynitin guptaNo ratings yet
- Assignment-2 The Sound of Music Part-2 WorksheetDocument1 pageAssignment-2 The Sound of Music Part-2 Worksheetnitin gupta100% (1)
- Article Writing: The Opinions and Thoughts of The Writer, Backed by Facts and EvidenceDocument7 pagesArticle Writing: The Opinions and Thoughts of The Writer, Backed by Facts and Evidencenitin guptaNo ratings yet
- Defining The Effectiveness of Uv Lamps Installed in Circulating Air For DuctworkDocument49 pagesDefining The Effectiveness of Uv Lamps Installed in Circulating Air For DuctworkPhạm Quang HuyNo ratings yet
- Ultrasonic Humidifiers: Course No: M02-006 Credit: 2 PDHDocument21 pagesUltrasonic Humidifiers: Course No: M02-006 Credit: 2 PDHnitin guptaNo ratings yet
- Triterpenes and Steroids From Semi-Mangrove Plant Hibiscus TiliaceusDocument3 pagesTriterpenes and Steroids From Semi-Mangrove Plant Hibiscus TiliaceusRidho Dhe HolmesNo ratings yet
- INTEGRATED NCM MEDICINE WITH S-NCM NEW KNOWLEDGE 2nd Edition PDFDocument153 pagesINTEGRATED NCM MEDICINE WITH S-NCM NEW KNOWLEDGE 2nd Edition PDFAzaNo ratings yet
- S Problem Set 4: 1 Young & Friedman 5 26Document5 pagesS Problem Set 4: 1 Young & Friedman 5 26Jake AJNo ratings yet
- FM 3e SI Chap09 LectureDocument111 pagesFM 3e SI Chap09 LectureRuben SegarNo ratings yet
- Physicochemical Characterization of Muscovado Sugar Using Different Sugarcane Varieties and StandardizedDocument18 pagesPhysicochemical Characterization of Muscovado Sugar Using Different Sugarcane Varieties and StandardizedGlobal Research and Development ServicesNo ratings yet
- Polymer ChemistryDocument47 pagesPolymer ChemistryBapu ThoratNo ratings yet
- The Theory of InterestDocument13 pagesThe Theory of InterestdenireziNo ratings yet
- Low Voltage Distribution Transformers - Single Phase - EE25S3H PDFDocument4 pagesLow Voltage Distribution Transformers - Single Phase - EE25S3H PDFGalih TrisnanugrahaNo ratings yet
- Tutorial 1 - 2nd Law and Gas Turbine CyclesDocument2 pagesTutorial 1 - 2nd Law and Gas Turbine CyclesumarNo ratings yet
- Assignment-12 and SolutionDocument11 pagesAssignment-12 and SolutionadimeghaNo ratings yet
- ZornDocument6 pagesZornMarius DiaconuNo ratings yet
- Composite Failure AnalysisDocument251 pagesComposite Failure AnalysisFernandoNo ratings yet
- Density Functionals PollDocument8 pagesDensity Functionals PollNarges MohamadiNo ratings yet
- Physicssolutionmanuals 151015074549 Lva1 App6891Document28 pagesPhysicssolutionmanuals 151015074549 Lva1 App6891Kusumlata TomarNo ratings yet
- Paul Smitson Riddle of The Distorted BTODocument56 pagesPaul Smitson Riddle of The Distorted BTOU862No ratings yet
- Lucas, 1941 - Common Deffects Ice CreamDocument30 pagesLucas, 1941 - Common Deffects Ice CreamdavidNo ratings yet
- A 040001Document5 pagesA 040001diemnganNo ratings yet
- The Simulation Study For Switched Reluctance Motor Drives Based On Matlab6.5Document6 pagesThe Simulation Study For Switched Reluctance Motor Drives Based On Matlab6.5spnangraniNo ratings yet
- The Analysis of LSD: Learning ObjectivesDocument13 pagesThe Analysis of LSD: Learning ObjectivesLucas GamaNo ratings yet
- Electronic Controller: Water - Air Units: Chillers Y Heat PumpsDocument25 pagesElectronic Controller: Water - Air Units: Chillers Y Heat Pumpsdiegorodriguez1988No ratings yet
- 2005 - Active Listening Room Compensation For Spatial Sound Reproduction SystemsDocument293 pages2005 - Active Listening Room Compensation For Spatial Sound Reproduction Systemsarthi_ramaniamNo ratings yet
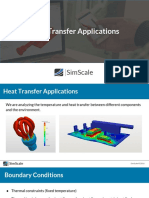
- Heat Transfer Applications: SimscaleDocument24 pagesHeat Transfer Applications: SimscaleCông TuấnNo ratings yet
- Control Theory II - Homework 1-Chapter 1: 1 ProblemsDocument2 pagesControl Theory II - Homework 1-Chapter 1: 1 ProblemsSantiago Orellana CNo ratings yet