You might also like
- Autonomous Robots PDFDocument8 pagesAutonomous Robots PDFEduard FlorinNo ratings yet
- Algorithms and Sensors For Small Robot Path FollowingDocument8 pagesAlgorithms and Sensors For Small Robot Path Followingltve20ee142No ratings yet
- Path Following ICRA02Document8 pagesPath Following ICRA02orthomorphaNo ratings yet
- Base PapDocument6 pagesBase PapAnonymous ovq7UE2WzNo ratings yet
- Prometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José TafurDocument4 pagesPrometeo: Beach Cleaner Robot: Oscar Cieza, Carlos Ugarte, Elizabeth Gutiérrez, Javier García, José Tafurruben dollarzNo ratings yet
- Reactive Navigation for Autonomous Guided Vehicles Using Neuro-fuzzy TechniquesDocument10 pagesReactive Navigation for Autonomous Guided Vehicles Using Neuro-fuzzy TechniquesMiguel SilvaNo ratings yet
- "Autonomous Navigation of Mobile Robots From Basic Sensing To Problem Solving PDFDocument6 pages"Autonomous Navigation of Mobile Robots From Basic Sensing To Problem Solving PDFaliNo ratings yet
- Design of Wireless Operated Forklift Using RFIDDocument4 pagesDesign of Wireless Operated Forklift Using RFIDmabooufNo ratings yet
- 3 - Autonomous Stair-Climbing With Miniature Jumping RobotsDocument13 pages3 - Autonomous Stair-Climbing With Miniature Jumping RobotsjowdiverNo ratings yet
- DYNAMIC RENDEZVOUS AND DOCKING SIMULATION FACILITY: USE CASES AND 2012 STATUSDocument5 pagesDYNAMIC RENDEZVOUS AND DOCKING SIMULATION FACILITY: USE CASES AND 2012 STATUSperrot louisNo ratings yet
- 10 OnlineDocument8 pages10 OnlinearyanNo ratings yet
- Arduino Based Battlefield Assistive RobotDocument6 pagesArduino Based Battlefield Assistive RobotVundi Sri HarshaNo ratings yet
- Nasa: Bergh 00 1190Document6 pagesNasa: Bergh 00 1190NASAdocumentsNo ratings yet
- Implementation of Visionbased Autonomous Mobile Platform To Cont 2018Document6 pagesImplementation of Visionbased Autonomous Mobile Platform To Cont 2018tou kaiNo ratings yet
- Ieee Robotics Projects PDFDocument2 pagesIeee Robotics Projects PDFTrinesh GowdaNo ratings yet
- Low Cost AvDocument5 pagesLow Cost AvrahulsundaresanNo ratings yet
- Modular Armed Advanced Robotic System 2018 - 19Document56 pagesModular Armed Advanced Robotic System 2018 - 19neweraNo ratings yet
- Speaking Swarmish: Human-Robot Interface Design For Large Swarms of Autonomous Mobile RobotsDocument4 pagesSpeaking Swarmish: Human-Robot Interface Design For Large Swarms of Autonomous Mobile RobotsArunNo ratings yet
- Robotics Helicopter Control and Its Applications in EngineeringDocument6 pagesRobotics Helicopter Control and Its Applications in EngineeringInternational Journal of computational Engineering research (IJCER)No ratings yet
- Nu. 1002.4180 PDFDocument4 pagesNu. 1002.4180 PDFgigi duruNo ratings yet
- The New Era of Intelligent Networked RoboticsDocument33 pagesThe New Era of Intelligent Networked Roboticsharikiran3285No ratings yet
- RF Operated Swimming Bot With Pick & Place FacilityDocument11 pagesRF Operated Swimming Bot With Pick & Place FacilityVijayKumarVijayNo ratings yet
- GO-2:-A A M R S M: N Utonomous Obile Obot For A Cience UseumDocument5 pagesGO-2:-A A M R S M: N Utonomous Obile Obot For A Cience UseumVeeru B ByahattiNo ratings yet
- Wireless Robot Control With Robotic Arm Using Mems and ZigbeeDocument5 pagesWireless Robot Control With Robotic Arm Using Mems and ZigbeeCh RamanaNo ratings yet
- Multi-Level Architecture For A Swarm of Surveillance RoversDocument13 pagesMulti-Level Architecture For A Swarm of Surveillance RoversIJRASETPublications100% (1)
- Land Mine Detecting Robot Capable of Path PlanningLand Mine Detecting Robot Capable of Path PlanningDocument10 pagesLand Mine Detecting Robot Capable of Path PlanningLand Mine Detecting Robot Capable of Path Planningzubairaw100% (1)
- Advance Line Following Robot: Shivam Singh, Prashant KumarDocument3 pagesAdvance Line Following Robot: Shivam Singh, Prashant Kumaranil kasot100% (1)
- Zebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingDocument16 pagesZebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingAndrej BašićNo ratings yet
- Smartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalDocument6 pagesSmartphone Controlled Robotic Vehicle With Unique Bearing Alignment Mechanism and Robotic Arm For Dangerous Object DisposalEditor IJTSRDNo ratings yet
- Robotic SystemDocument24 pagesRobotic SystemadimrinNo ratings yet
- Implementation of VFHDocument6 pagesImplementation of VFHqwerty uNo ratings yet
- Adaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryDocument6 pagesAdaptive Control Strategy of Climbing Robot For Inspection Applications in Construction IndustryVishal PatilNo ratings yet
- Real-Time Control of Soccer-Playing Robots Using Off-Board Vision - The Dynamite TestbedDocument4 pagesReal-Time Control of Soccer-Playing Robots Using Off-Board Vision - The Dynamite TestbedTan Tien NguyenNo ratings yet
- Design and Implementation of Application Software For User Friendly Operation of Industrial RobotDocument5 pagesDesign and Implementation of Application Software For User Friendly Operation of Industrial RobotIIR indiaNo ratings yet
- Bet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Document20 pagesBet'S Basavakalyan Engineering College BASAVAKALYAN-585327: "RF Controlled Multi-Terrain Robot"Abhay BhujNo ratings yet
- Vision For Mobile Robot Navigation - A Survey PDFDocument31 pagesVision For Mobile Robot Navigation - A Survey PDFtes donlodNo ratings yet
- Vision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied EnvironmentsDocument6 pagesVision-Based Guidance and Control of A Hovering Vehicle in Unknown, GPS-denied Environmentsp_p9No ratings yet
- Ijetae 1214 100Document5 pagesIjetae 1214 100akula pranathiNo ratings yet
- Alive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotDocument4 pagesAlive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotrajatpreetNo ratings yet
- Cooperative Robots Architecture For An Assistive ScenarioDocument2 pagesCooperative Robots Architecture For An Assistive ScenarioAndreaNo ratings yet
- Indoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerDocument12 pagesIndoor Intelligent Mobile Robot Localization Using Fuzzy Compensation and Kalman Filter To Fuse The Data of Gyroscope and MagnetometerWheel ChairNo ratings yet
- Autonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesDocument13 pagesAutonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesIvan CheahNo ratings yet
- Hexapod Robot For Detecting Landmines With SILO6 As Baseline, During War ActionsDocument6 pagesHexapod Robot For Detecting Landmines With SILO6 As Baseline, During War Actionsanon_933015100% (1)
- Multifunction System of Mobile RoboticsDocument4 pagesMultifunction System of Mobile Roboticsdr_mkurdiNo ratings yet
- Wall-Following Using A Kinect Sensor For Corridor Coverage NavigationDocument6 pagesWall-Following Using A Kinect Sensor For Corridor Coverage NavigationRafiudin DarmawanNo ratings yet
- Mobile Robots For Search and Rescue: Niramon Ruangpayoongsak Hubert Roth Jan ChudobaDocument6 pagesMobile Robots For Search and Rescue: Niramon Ruangpayoongsak Hubert Roth Jan ChudobaNemitha LakshanNo ratings yet
- Embedded Mobile ROS Platform For SLAM Application With RGB-D CamerasDocument5 pagesEmbedded Mobile ROS Platform For SLAM Application With RGB-D CamerasWa KaNo ratings yet
- D H A C R: Igital Uman Ction Opying ObotDocument7 pagesD H A C R: Igital Uman Ction Opying ObotMaitriya DamaniNo ratings yet
- Dynamic Map Generating Rescue RobotDocument11 pagesDynamic Map Generating Rescue RobotshaktishoaibNo ratings yet
- Introduction To Autonomous Mobile Robots: Second EditionDocument14 pagesIntroduction To Autonomous Mobile Robots: Second EditionmotazNo ratings yet
- Autonomy Paper DraftDocument8 pagesAutonomy Paper DraftAmir hamzaNo ratings yet
- JETIRFA06001Document5 pagesJETIRFA06001Trần ĐạtNo ratings yet
- Unmanned Level Crossing Controller and Rail Track Broken Detection System Using IR Sensors and Internet of Things TechnologyDocument5 pagesUnmanned Level Crossing Controller and Rail Track Broken Detection System Using IR Sensors and Internet of Things TechnologyjohnsonNo ratings yet
- Encoder-Free Odometric System For Autonomous MicrorobotsDocument11 pagesEncoder-Free Odometric System For Autonomous MicrorobotsSergeNo ratings yet
- An Autonomous Firefighting Robot: Abstract: The Field of Firefighting Has Long Been ADocument6 pagesAn Autonomous Firefighting Robot: Abstract: The Field of Firefighting Has Long Been Apooja madhurkarNo ratings yet
- Visual Perception in Hexapod Robot: Volume 1, Issue 3, September - October 2012Document5 pagesVisual Perception in Hexapod Robot: Volume 1, Issue 3, September - October 2012International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Low Cost AvDocument5 pagesLow Cost Avdemondrifter777No ratings yet
- Implementing Autonomous Navigation Robot For Building 2D Map of Indoor EnvironmentDocument8 pagesImplementing Autonomous Navigation Robot For Building 2D Map of Indoor EnvironmentShubass RameshNo ratings yet
- Aficio 2022Document1,118 pagesAficio 2022hmilyasNo ratings yet
- Application Note Motor NoiseDocument1 pageApplication Note Motor NoisehmilyasNo ratings yet
- E6 43 15 03Document6 pagesE6 43 15 03hmilyasNo ratings yet
- E6 43 15 03Document6 pagesE6 43 15 03hmilyasNo ratings yet
- Flyer FinalDocument1 pageFlyer FinalhmilyasNo ratings yet
- PCB PrintsDocument1 pagePCB PrintshmilyasNo ratings yet
- 10818Document1 page10818hmilyasNo ratings yet
- Ups Technical OverwiewDocument51 pagesUps Technical Overwiewlug21100% (1)
- Robotics and Autonomous Systems 42 (2003) 245-258Document14 pagesRobotics and Autonomous Systems 42 (2003) 245-258hmilyasNo ratings yet
- DM54LS469/DM74LS469 8-Bit Up/Down Counter: General DescriptionDocument4 pagesDM54LS469/DM74LS469 8-Bit Up/Down Counter: General DescriptionhmilyasNo ratings yet
- Desarmado y Armado de Transmision 950BDocument26 pagesDesarmado y Armado de Transmision 950Bedilberto chableNo ratings yet
- FFTW Installation On WindowsDocument6 pagesFFTW Installation On WindowsDebora SchwarzNo ratings yet
- Transmission Line ProtectionDocument111 pagesTransmission Line ProtectioneccabadNo ratings yet
- COA (Odoo Egypt)Document8 pagesCOA (Odoo Egypt)menams2010No ratings yet
- Balanced Modulator and Demodulator ExperimentDocument6 pagesBalanced Modulator and Demodulator ExperimentShubham SharmaNo ratings yet
- Caf 8 Aud Spring 2022Document3 pagesCaf 8 Aud Spring 2022Huma BashirNo ratings yet
- Naoh Storage Tank Design Description:: Calculations For Tank VolumeDocument6 pagesNaoh Storage Tank Design Description:: Calculations For Tank VolumeMaria Eloisa Angelie ArellanoNo ratings yet
- Educ 3 ReviewerDocument21 pagesEduc 3 ReviewerMa.Lourdes CamporidondoNo ratings yet
- KCC Strategic Plan 2020-2023Document103 pagesKCC Strategic Plan 2020-2023Kellogg Community CollegeNo ratings yet
- BSC in EEE Full Syllabus (Credit+sylabus)Document50 pagesBSC in EEE Full Syllabus (Credit+sylabus)Sydur RahmanNo ratings yet
- Table of Forces For TrussDocument7 pagesTable of Forces For TrussSohail KakarNo ratings yet
- Airfix 2011 CatalogueDocument132 pagesAirfix 2011 CatalogueGordon Sorensen0% (1)
- Private Copy of Vishwajit Mishra (Vishwajit - Mishra@hec - Edu) Copy and Sharing ProhibitedDocument8 pagesPrivate Copy of Vishwajit Mishra (Vishwajit - Mishra@hec - Edu) Copy and Sharing ProhibitedVISHWAJIT MISHRANo ratings yet
- Engineered Cementitious Composites: Practical ApplicationsDocument26 pagesEngineered Cementitious Composites: Practical Applicationsmubashir ahmedNo ratings yet
- Dr Nael Qtati's E-Commerce Business Models Week 1 CourseDocument28 pagesDr Nael Qtati's E-Commerce Business Models Week 1 CourseMohammed LubbadNo ratings yet
- ETP48300-C6D2 Embedded Power User Manual PDFDocument94 pagesETP48300-C6D2 Embedded Power User Manual PDFjose benedito f. pereira100% (1)
- Presenting India's Biggest NYE 2023 Destination PartyDocument14 pagesPresenting India's Biggest NYE 2023 Destination PartyJadhav RamakanthNo ratings yet
- ICT FX4Model FrameworkDocument20 pagesICT FX4Model FrameworkSnowNo ratings yet
- Webpage citation guideDocument4 pagesWebpage citation guiderogelyn samilinNo ratings yet
- Fifeville Plan: Building A Connected CommunityDocument92 pagesFifeville Plan: Building A Connected CommunityAl DiNo ratings yet
- تقرير سبيس فريم PDFDocument11 pagesتقرير سبيس فريم PDFAli AkeelNo ratings yet
- Common Size Statement: A Technique of Financial Analysis: June 2019Document8 pagesCommon Size Statement: A Technique of Financial Analysis: June 2019safa haddadNo ratings yet
- BS en 12951-2004Document26 pagesBS en 12951-2004Mokhammad Fahmi IzdiharrudinNo ratings yet
- Ts 391 IltDocument5 pagesTs 391 IltFunnypoumNo ratings yet
- SMG Wireless Gateway ManualV2.2.0Document95 pagesSMG Wireless Gateway ManualV2.2.0shahedctgNo ratings yet
- Kooltherm PipeDocument8 pagesKooltherm Pipenaseema1No ratings yet
- Manual Centrifugadora - Jouan B4i - 2Document6 pagesManual Centrifugadora - Jouan B4i - 2Rita RosadoNo ratings yet
- Balance NettingDocument20 pagesBalance Nettingbaluanne100% (1)
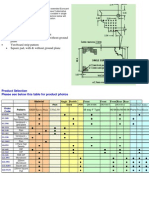
- Product Models Comparison: Fortigate 1100E Fortigate 1800FDocument1 pageProduct Models Comparison: Fortigate 1100E Fortigate 1800FAbdullah AmerNo ratings yet
- Hazard Identification Priority Area Checklist Worksafe Gov AuDocument29 pagesHazard Identification Priority Area Checklist Worksafe Gov Aufh71100% (1)