You might also like
- Cálculos Cruz de Malta (Posicion, Velocidad, Aceleración)Document14 pagesCálculos Cruz de Malta (Posicion, Velocidad, Aceleración)Triany Castro100% (2)
- Análisis dinámico de fuerzas en un mecanismo de cuatro barras con corredera invertidaDocument4 pagesAnálisis dinámico de fuerzas en un mecanismo de cuatro barras con corredera invertidaLuis VazquezNo ratings yet
- BombasDocument20 pagesBombasEduardoNo ratings yet
- Métodos Matriciales para ingenieros con MATLABFrom EverandMétodos Matriciales para ingenieros con MATLABRating: 5 out of 5 stars5/5 (1)
- Rueda de GinebraDocument6 pagesRueda de GinebraIsabel Restrepo100% (1)
- Mecanismos - Mabie - Cap - 7 y 8Document61 pagesMecanismos - Mabie - Cap - 7 y 8Eduardo Nuñez Cruz93% (14)
- Ejercicios de Integrales de Línea, Superficie y VolumenFrom EverandEjercicios de Integrales de Línea, Superficie y VolumenRating: 4 out of 5 stars4/5 (2)
- Aceleración de Coriolis: Dos métodos para obtenerlaDocument4 pagesAceleración de Coriolis: Dos métodos para obtenerlaIvan Acosta100% (1)
- ACELERACIÓN Mecanismos Ejercicios 1Document10 pagesACELERACIÓN Mecanismos Ejercicios 1MauricioNo ratings yet
- Estudio de Caso MecanismosDocument60 pagesEstudio de Caso MecanismosErik Blanco0% (1)
- Clase 2 Pares CinematicosDocument22 pagesClase 2 Pares CinematicosKevin DanielNo ratings yet
- Biela Manivela Corredera DescentradaDocument13 pagesBiela Manivela Corredera DescentradaBryanSamaniegoAndrade100% (2)
- Trenes de engranaje planetarios resolución problemasDocument7 pagesTrenes de engranaje planetarios resolución problemasEsteban Llanos100% (1)
- Respuesta Del Yunque de Un Martillo de ForjaDocument19 pagesRespuesta Del Yunque de Un Martillo de ForjaMoncayo Matute Freddy PatricioNo ratings yet
- Problemario Ciclo Otto 2TDocument6 pagesProblemario Ciclo Otto 2TJesus RiveraNo ratings yet
- Mecanismos IPN AzcapotzalcoDocument28 pagesMecanismos IPN AzcapotzalcoDiego GR100% (2)
- Problemas de EslabonamientoDocument7 pagesProblemas de EslabonamientoErick Alarcon0% (1)
- Informe DinámicaDocument10 pagesInforme DinámicaJorge Iván RamirezNo ratings yet
- Capitulo 3 ATN 603Document23 pagesCapitulo 3 ATN 603Callisaya Marca CristianNo ratings yet
- Deber Ejercicio 3 14 Teoria de MecanismoDocument3 pagesDeber Ejercicio 3 14 Teoria de MecanismoGabriel SimbañaNo ratings yet
- Mecanismo de 4 BarrasDocument4 pagesMecanismo de 4 BarrasPablo Martin CadenaNo ratings yet
- Conceptos Básicos y Topológicos de Los Mecanismos - 51989Document9 pagesConceptos Básicos y Topológicos de Los Mecanismos - 51989EmilioAntonioJimenezFloresNo ratings yet
- C12b Ejercicios Trenes Planetarios PDFDocument16 pagesC12b Ejercicios Trenes Planetarios PDFWilliam VilcaNo ratings yet
- 5 10 19 24 MecanismosDocument4 pages5 10 19 24 Mecanismoshector ortizNo ratings yet
- Esta 5Document6 pagesEsta 5Sebastian Simbaña100% (1)
- Ejercicios DinamicaDocument7 pagesEjercicios DinamicaVictor Jesus Luque MedinaNo ratings yet
- Deber 1Document7 pagesDeber 1StevenPalacios0% (1)
- TAREA #2 MecanismosDocument3 pagesTAREA #2 Mecanismosjhonatan mamaniNo ratings yet
- Problemas Propuestos para Dinamica Trabajo 5-1 PDFDocument18 pagesProblemas Propuestos para Dinamica Trabajo 5-1 PDFWuber RojasNo ratings yet
- Expresiones trigonométricas en forma fasorialDocument3 pagesExpresiones trigonométricas en forma fasorialAlfredo FerrerNo ratings yet
- Introduccion A La Proyección de MecanismosDocument20 pagesIntroduccion A La Proyección de MecanismosErick PalomoNo ratings yet
- Problemas Resueltos LevasDocument21 pagesProblemas Resueltos LevasAngel JesúsNo ratings yet
- Informe FInal Mecanica de FluidosDocument51 pagesInforme FInal Mecanica de FluidosGEOTECNICA SEPTIMO100% (1)
- Trenes de EngranesDocument5 pagesTrenes de EngranesDeck PsyrcusNo ratings yet
- Metodo Analitico Series de FourierDocument12 pagesMetodo Analitico Series de FourierJulio César De DiosNo ratings yet
- Engranajes CónicosDocument91 pagesEngranajes CónicosMIGUELEDUCADOR12No ratings yet
- Ecuaciones para analizar la dinámica del mecanismo de biela del motor Ford F150Document3 pagesEcuaciones para analizar la dinámica del mecanismo de biela del motor Ford F150Santiago SdcNo ratings yet
- Clasificación de Problemas en SintesisDocument2 pagesClasificación de Problemas en SintesisJORGE ANTONIO PEREZ ROBLESNo ratings yet
- Actividad 2 Edgar Abdel Trejo HeartDocument10 pagesActividad 2 Edgar Abdel Trejo HeartAbdel HeartNo ratings yet
- Vectores Problemas de FuerzasDocument2 pagesVectores Problemas de FuerzasdcadcNo ratings yet
- Deber 1Document6 pagesDeber 1MICHAEL VINICIO DE LA CRUZ GUAYASAMINNo ratings yet
- Ecuación de LazoDocument11 pagesEcuación de LazoHuitzi Franco Rugerio100% (1)
- EJEMPLOS M-N-Q 1 y 2Document7 pagesEJEMPLOS M-N-Q 1 y 2Fernando Corzo100% (1)
- Mecanismos cinemáticos: bomba, ventana y sierraDocument4 pagesMecanismos cinemáticos: bomba, ventana y sierraANDRES DAVID NUÑEZ GUTIERREZNo ratings yet
- Punto Coriolis - PintoDocument3 pagesPunto Coriolis - PintoJuan Sebastian Morales SierraNo ratings yet
- Dimensiones de La Rueda de Ginebra (Cruz de Malta)Document3 pagesDimensiones de La Rueda de Ginebra (Cruz de Malta)elgordo638480% (5)
- MruDocument6 pagesMruTíffanyBelénVegaAcuña25% (4)
- Problemas Propuestos Cinetica CuerpoDocument16 pagesProblemas Propuestos Cinetica CuerpoKelvinSevillanoNo ratings yet
- Mecanismo de Manivela Biela Corredera Este Mecanismo Se Emplea Ampliamente y Encuentra Su Mayor Aplicación en Motores de Combustión Interna y en Compresión de GasesDocument7 pagesMecanismo de Manivela Biela Corredera Este Mecanismo Se Emplea Ampliamente y Encuentra Su Mayor Aplicación en Motores de Combustión Interna y en Compresión de GasesDavid Benjamín Romero AlmeidaNo ratings yet
- Tema I ESQUEMAS CINEMATICOSDocument15 pagesTema I ESQUEMAS CINEMATICOSLuis GarcíaNo ratings yet
- Mecanica Vectorial Problemas PDFDocument1 pageMecanica Vectorial Problemas PDFwalterNo ratings yet
- Ejercicio 6Document10 pagesEjercicio 6delfoNo ratings yet
- Guia FinalDocument2 pagesGuia FinalMartín GarciaNo ratings yet
- Deber 2 Yugo EscocesDocument11 pagesDeber 2 Yugo EscocesAlex ChancúsigNo ratings yet
- Angulosenposicionnormal2 110916014215 Phpapp01Document5 pagesAngulosenposicionnormal2 110916014215 Phpapp01Bartolome Sánchez BuenoNo ratings yet
- Angulos CuadrantalesDocument5 pagesAngulos CuadrantalesMichel Puma Centeno100% (1)
- C131 AbrasiónDocument5 pagesC131 AbrasiónAlexandra Blooming100% (1)
- Esquema HidraulicoDocument1 pageEsquema Hidraulicoedgartoga2No ratings yet
- Indicadores microbiológicos de contaminación fecal en aguasDocument6 pagesIndicadores microbiológicos de contaminación fecal en aguasjtello8934No ratings yet
- Ingenieria Civil en La Edad MediaDocument28 pagesIngenieria Civil en La Edad Mediaedgartoga2No ratings yet
- Anexo 12 Del Ala, Autorización Ejecucion de Obras de Aprovechamiento Hidrico SuperficialDocument15 pagesAnexo 12 Del Ala, Autorización Ejecucion de Obras de Aprovechamiento Hidrico Superficialedgartoga2100% (2)
- Manual para Analisis Basicos de Calidad Del AguaDocument147 pagesManual para Analisis Basicos de Calidad Del AguaRomulo Aycachi Inga75% (4)
- Proyecto de Servicios Higienicos SnipDocument67 pagesProyecto de Servicios Higienicos Snipedgartoga2No ratings yet
- Expediente Cantera, PARA OPINION TECNICA VINCULANTE ALA.Document21 pagesExpediente Cantera, PARA OPINION TECNICA VINCULANTE ALA.edgartoga2100% (3)
- Calidad de AguaDocument50 pagesCalidad de AguaEdgar Luis Antunez CarranzaNo ratings yet
- Cemento en PeruDocument13 pagesCemento en Peruedgartoga2No ratings yet
- Analisis de Calidad de Agua Ica IcoDocument18 pagesAnalisis de Calidad de Agua Ica Icoedgartoga2No ratings yet
- Proyecto de Tesis "Indicadores de Calidad y Contaminacion (Icas e Icos) en Aguas Residuales de La Industria VinicolaDocument39 pagesProyecto de Tesis "Indicadores de Calidad y Contaminacion (Icas e Icos) en Aguas Residuales de La Industria Vinicolaedgartoga2No ratings yet
- Pip Mejoramiento de La Produccion Mediante Agroforesteria en Yantalo 2013Document232 pagesPip Mejoramiento de La Produccion Mediante Agroforesteria en Yantalo 2013edgartoga2No ratings yet
- Proyecto de Tesis Edgar RecvarrenDocument29 pagesProyecto de Tesis Edgar Recvarrenedgartoga2No ratings yet
- El Cambio Climatico RDocument140 pagesEl Cambio Climatico RFrancisco Eduardo CastilloNo ratings yet
- Sustancias Toxicas PersistentesDocument261 pagesSustancias Toxicas PersistentesGustavo Vera100% (2)
- Manual Expediente TécnicoDocument165 pagesManual Expediente TécnicoIbar Ivan Prieto Desulovich83% (18)
- Mejoramiento drenaje Tingo MaríaDocument104 pagesMejoramiento drenaje Tingo Maríaedgartoga2No ratings yet
- Manual de Compostaje MunicipalDocument104 pagesManual de Compostaje MunicipalJuan Paulo Reyes100% (1)
- Fica Drenaje Pluvial FinalDocument96 pagesFica Drenaje Pluvial Finaledgartoga2No ratings yet
- Ordenanza #016-2012-MPLP - Regula La Tenencia, Proteccion PARA ASESORIADocument16 pagesOrdenanza #016-2012-MPLP - Regula La Tenencia, Proteccion PARA ASESORIAedgartoga2No ratings yet
- Cartas CEPD 2013Document1 pageCartas CEPD 2013edgartoga2No ratings yet
- Trabajo Colaborativo - Fase 3 PreparacionDocument24 pagesTrabajo Colaborativo - Fase 3 PreparacionyessicaNo ratings yet
- UNAN-León Odontología Mapa placas base y rodetes ceraDocument2 pagesUNAN-León Odontología Mapa placas base y rodetes ceraAilyn RubiNo ratings yet
- Cómo enseñar a preadolescentes y adolescentes en la escuela dominicalDocument6 pagesCómo enseñar a preadolescentes y adolescentes en la escuela dominicalFrancisco Acual100% (1)
- Pat 2024Document20 pagesPat 2024Lliseli Zabaleta LopezNo ratings yet
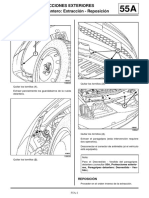
- Manual Exteriores LoganDocument15 pagesManual Exteriores LogancamapamaNo ratings yet
- MS-01-176 - AntiretornoDocument17 pagesMS-01-176 - AntiretornoqmasdaNo ratings yet
- Semana 1Document9 pagesSemana 1EduardoNo ratings yet
- Maquinas 1Document8 pagesMaquinas 1JesusVilcaYepezNo ratings yet
- Procedimiento para El Mtto. Preventivo y Correctivo CargadoresDocument26 pagesProcedimiento para El Mtto. Preventivo y Correctivo CargadoresAndres Gonzalez MartinezNo ratings yet
- EXPERIMENTO Fuente de AmoniacoDocument3 pagesEXPERIMENTO Fuente de AmoniacokiomNo ratings yet
- 1.1. Vision de La PlaneaciónDocument35 pages1.1. Vision de La Planeaciónxavier castañedaNo ratings yet
- U3 - Cuidados PaliativosDocument5 pagesU3 - Cuidados Paliativosariana quiñonesNo ratings yet
- FPR 005 Identificacion de Producto No ConformeDocument19 pagesFPR 005 Identificacion de Producto No ConformealejoDagonNo ratings yet
- Modulo 7.2 PDFDocument11 pagesModulo 7.2 PDFKIESER DE LA PEÑA GASPARNo ratings yet
- Cinetica de Monod en AlimentosDocument31 pagesCinetica de Monod en Alimentosluis100% (1)
- Informe Creditex Io 2 1Document17 pagesInforme Creditex Io 2 1Norma ItoNo ratings yet
- Humbolt y Su Contribucion A La CienciaDocument18 pagesHumbolt y Su Contribucion A La Cienciasergio_dingessNo ratings yet
- Juego ficción y ToM niños dificultades socialesDocument15 pagesJuego ficción y ToM niños dificultades socialesLorena Lincopán ViverosNo ratings yet
- 2023 Plan Operativo de Sec Acad 2020 - EntregaDocument9 pages2023 Plan Operativo de Sec Acad 2020 - EntregaMiguel Roberto HilarioNo ratings yet
- Tesis Sobre AlcoholismoDocument80 pagesTesis Sobre AlcoholismoCarlos Butavand100% (1)
- La generación mileurista: jóvenes con preparación pero bajos ingresosDocument3 pagesLa generación mileurista: jóvenes con preparación pero bajos ingresosPaola Roriguez GalarzaNo ratings yet
- Tipos micrófonos dinámico condensador electret PZMDocument4 pagesTipos micrófonos dinámico condensador electret PZMalvarojimenez91No ratings yet
- DiplomadoDocument4 pagesDiplomadoEleida AzuajeNo ratings yet
- Desarrollo competencias comunicativasDocument4 pagesDesarrollo competencias comunicativaskatha87100% (1)
- Conservacion Por Adicion de SalDocument19 pagesConservacion Por Adicion de SalAlexandra Limache AlaveNo ratings yet
- Tipos de Suelos en El EcuadorDocument29 pagesTipos de Suelos en El EcuadorFreddy XavierNo ratings yet
- Entrega Final Fotoperiodismo 202111Document7 pagesEntrega Final Fotoperiodismo 202111Javier eduardo Granados moraNo ratings yet
- 01salud MentalDocument3 pages01salud MentalAntonio TepoxNo ratings yet
- Modelo Del CuidadoDocument7 pagesModelo Del Cuidadodg1103bhNo ratings yet
- Ventajas y Desventajas de Los PresupuestosDocument26 pagesVentajas y Desventajas de Los PresupuestosJohana OrtízNo ratings yet
- South Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptFrom EverandSouth Central Alaska a Guide to the Hiking & Canoeing Trails ExcerptRating: 5 out of 5 stars5/5 (1)
- Arizona, Utah & New Mexico: A Guide to the State & National ParksFrom EverandArizona, Utah & New Mexico: A Guide to the State & National ParksRating: 4 out of 5 stars4/5 (1)
- The Bahamas a Taste of the Islands ExcerptFrom EverandThe Bahamas a Taste of the Islands ExcerptRating: 4 out of 5 stars4/5 (1)
- Naples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoFrom EverandNaples, Sorrento & the Amalfi Coast Adventure Guide: Capri, Ischia, Pompeii & PositanoRating: 5 out of 5 stars5/5 (1)
- New York & New Jersey: A Guide to the State & National ParksFrom EverandNew York & New Jersey: A Guide to the State & National ParksNo ratings yet
- Japanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensFrom EverandJapanese Gardens Revealed and Explained: Things To Know About The Worlds Most Beautiful GardensNo ratings yet