You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Request For ProposalDocument216 pagesRequest For ProposalGilbert KamanziNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Manual Roland Xp-30Document212 pagesManual Roland Xp-30Jose Luis Rojas Flores100% (1)
- Print to PDF without novaPDF messageDocument46 pagesPrint to PDF without novaPDF messageCj Santiago100% (2)
- Oracle Database AdministratorDocument3 pagesOracle Database Administratorapi-122235783No ratings yet
- Ecommerce WebsiteDocument49 pagesEcommerce WebsiteMonsta X100% (1)
- Mercer Mettl Indonesia Telkom Case StudyDocument11 pagesMercer Mettl Indonesia Telkom Case StudyVincentiusArnoldNo ratings yet
- Historical Antecedents in The Course of Science and TechnologyDocument2 pagesHistorical Antecedents in The Course of Science and TechnologyElboy Son DecanoNo ratings yet
- Tutorial IL Orthophoto DEM Neogeo PDFDocument12 pagesTutorial IL Orthophoto DEM Neogeo PDFucridNo ratings yet
- Agisoft Photoscan Crash Course (V. 1.0.2)Document4 pagesAgisoft Photoscan Crash Course (V. 1.0.2)ucridNo ratings yet
- Tutorial IL Orthophoto DEM Neogeo PDFDocument12 pagesTutorial IL Orthophoto DEM Neogeo PDFucridNo ratings yet
- Software Workflow Agisoft Photoscan Pro 0.9.0: For Use With Gatewing X100 UasDocument20 pagesSoftware Workflow Agisoft Photoscan Pro 0.9.0: For Use With Gatewing X100 UasucridNo ratings yet
- Computer Engineering Department: Gtu Important Questions Bank Subject Name: Information Ecurity Subject Code SemesterDocument5 pagesComputer Engineering Department: Gtu Important Questions Bank Subject Name: Information Ecurity Subject Code SemesterKaushal PardasaniNo ratings yet
- Task Checklist Exhibition Re 2019Document4 pagesTask Checklist Exhibition Re 2019zikrillah1No ratings yet
- Computer PartsDocument36 pagesComputer PartsJed SorollaNo ratings yet
- MSP430FG461x, MSP430CG461x Mixed-Signal Microcontrollers: 1 Device OverviewDocument115 pagesMSP430FG461x, MSP430CG461x Mixed-Signal Microcontrollers: 1 Device OverviewOmar Canelo MacielNo ratings yet
- April SHETA Newsletter PDFDocument2 pagesApril SHETA Newsletter PDFtong_jNo ratings yet
- 1025936797Document184 pages1025936797Wilson AgudeloNo ratings yet
- Install Ansible On Mac OSXDocument5 pagesInstall Ansible On Mac OSXNagendraNo ratings yet
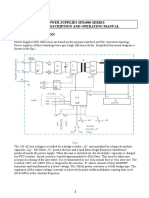
- Power Supplies SPS1000 Series Operating ManualDocument7 pagesPower Supplies SPS1000 Series Operating ManualKrystyna ZaczekNo ratings yet
- SAP EWM DeconsolidationDocument2 pagesSAP EWM DeconsolidationS BanerjeeNo ratings yet
- Zimbra Collaboration Product OverviewDocument4 pagesZimbra Collaboration Product OverviewStefanus E PrasstNo ratings yet
- Learn about the Attachment Point Element (ATTA) in PDMS and its various applicationsDocument2 pagesLearn about the Attachment Point Element (ATTA) in PDMS and its various applicationsPrasad KasettiNo ratings yet
- Optimize your SEO with the STT Series 2V220AH tubular flooded battery specificationsDocument1 pageOptimize your SEO with the STT Series 2V220AH tubular flooded battery specificationsPedro A Ocanto BNo ratings yet
- WatchGuard Presentation For AbadataDocument38 pagesWatchGuard Presentation For AbadatasiouxinfoNo ratings yet
- Unlock Business Growth with Data AnalyticsDocument56 pagesUnlock Business Growth with Data AnalyticsAizel AlmonteNo ratings yet
- Filetype PDF ConfidentialDocument2 pagesFiletype PDF ConfidentialRussellNo ratings yet
- Wii Terminology v03Document46 pagesWii Terminology v03DoctorProt HackNull12No ratings yet
- GSM ParametersDocument131 pagesGSM ParametersAjay ShuklaNo ratings yet
- Bdkm2103 Introductory Marketing CommunicationDocument12 pagesBdkm2103 Introductory Marketing Communicationdicky chongNo ratings yet
- Door Locks ServiceDocument12 pagesDoor Locks ServiceRepuesto GeneralNo ratings yet
- nRF52832 NFC Antenna Tuning: White PaperDocument15 pagesnRF52832 NFC Antenna Tuning: White PaperCanNo ratings yet
- Planos Electricos. Gruas NuevasDocument122 pagesPlanos Electricos. Gruas NuevasSebastian Segovia100% (1)
- Midtronics EXP HD Instruction ManualDocument52 pagesMidtronics EXP HD Instruction ManualZeckNo ratings yet
- Open World First WordlistDocument4 pagesOpen World First WordlistDavide GalloNo ratings yet