You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Week4 Divide and ConquerDocument15 pagesWeek4 Divide and ConquerHg0% (1)
- Environmental AuditDocument22 pagesEnvironmental AuditungkumariamNo ratings yet
- Concrete Mix Design 10Document1 pageConcrete Mix Design 10Rexter UnabiaNo ratings yet
- Roland Sands Design US CatalogDocument56 pagesRoland Sands Design US Catalogsema2210No ratings yet
- Mooring SystemsDocument6 pagesMooring SystemsVinicius PessottiNo ratings yet
- ManualDocument90 pagesManualBhárbara Idk100% (1)
- AA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFDocument746 pagesAA Holtz & Kovacs - An Introduction To Geotechnical Engineering PDFPeterNo ratings yet
- Agc-4 DRH 4189340686 UkDocument222 pagesAgc-4 DRH 4189340686 UkGiangDoNo ratings yet
- Harmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesDocument5 pagesHarmonic Oscillations of Spiral Springs - Springs Linked in Parallel and SeriesJose GalvanNo ratings yet
- NextCloud OnlyOffice PDFDocument89 pagesNextCloud OnlyOffice PDFOmar Gallegos Vazquez100% (1)
- NEOCLASSICAL CITY PlanningDocument10 pagesNEOCLASSICAL CITY PlanningAfrahNo ratings yet
- AAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Document10 pagesAAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Benjamín AlainNo ratings yet
- MH16 Series ROOFTOP AC Manual REV 2013Document19 pagesMH16 Series ROOFTOP AC Manual REV 2013caleb perezNo ratings yet
- Gear Trains ProblemsDocument9 pagesGear Trains Problemsa c s Kumar100% (1)
- Watergems - How To Design A Water Distribution SystemDocument3 pagesWatergems - How To Design A Water Distribution SystemhiyogsNo ratings yet
- Physics 02-07 Centripetal Force and Banked CurvesDocument2 pagesPhysics 02-07 Centripetal Force and Banked CurveslatteNo ratings yet
- 01 40 00 - Quality RequirementsDocument27 pages01 40 00 - Quality RequirementsshauhramNo ratings yet
- 3 Esrtos IntroDocument8 pages3 Esrtos IntroVijayaraghavan VNo ratings yet
- 13 Ijee2962nsDocument15 pages13 Ijee2962nspurvakul10No ratings yet
- Seafrost BD50F Refrigerator SystemDocument7 pagesSeafrost BD50F Refrigerator SystemMathiyazhagan SNo ratings yet
- Group 2 (ME 03) - Hoa Phat GroupDocument42 pagesGroup 2 (ME 03) - Hoa Phat GroupLê Thành DanhNo ratings yet
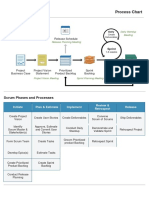
- Procesos SCRUMDocument2 pagesProcesos SCRUMRoseNo ratings yet
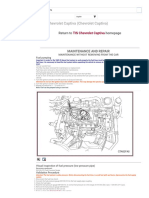
- Chevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.Document57 pagesChevrolet Captiva Service Manual. MAINTENANCE AND REPAIR.krisdiarto@gmail.com96% (23)
- A Interview QuestionsDocument363 pagesA Interview QuestionsJaishankar RenganathanNo ratings yet
- Clevo d900c Sager Np9260 Np9261Document100 pagesClevo d900c Sager Np9260 Np9261Doru RazvanNo ratings yet
- DHLDocument3 pagesDHLfmartinNo ratings yet
- The PA Bible Addn 03 Microphones PDFDocument4 pagesThe PA Bible Addn 03 Microphones PDFjosiasns5257100% (1)
- EBS Data MaskingDocument31 pagesEBS Data MaskingNawab ShariefNo ratings yet
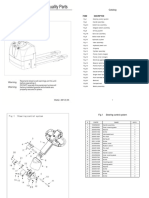
- Catalog: Ningbo Liftstar Material Handling Equipment Co., LTDDocument27 pagesCatalog: Ningbo Liftstar Material Handling Equipment Co., LTDKiều Văn TrungNo ratings yet
- Código BoogaDocument138 pagesCódigo BoogaJazmin SeguelNo ratings yet