You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- How To Design Your Own R/C Aircraft Guide: Part 1 (Setting Specifications and Designing The Wing)Document17 pagesHow To Design Your Own R/C Aircraft Guide: Part 1 (Setting Specifications and Designing The Wing)danylomalyuta100% (3)
- Lab Report 5Document6 pagesLab Report 5Sarwar Hosen SimonNo ratings yet
- AP PHYSICS B 1988 MC + AnswersDocument17 pagesAP PHYSICS B 1988 MC + AnswersbastardNo ratings yet
- Tigers Binocular Vision Enables Depth PerceptionDocument5 pagesTigers Binocular Vision Enables Depth PerceptionpaidalaNo ratings yet
- Virtual Work For Generalized TorqueDocument5 pagesVirtual Work For Generalized TorquedanylomalyutaNo ratings yet
- Flying 3D Paper Airplane Construction Manual (Cutout Nets Included!)Document12 pagesFlying 3D Paper Airplane Construction Manual (Cutout Nets Included!)danylomalyuta67% (3)
- How To Design Your Own R/C Aircraft Guide: Part 2 (Designing The Tail)Document17 pagesHow To Design Your Own R/C Aircraft Guide: Part 2 (Designing The Tail)danylomalyuta88% (8)
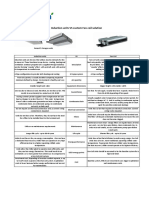
- HotelSolution: Induction Units VS Fan-Coil SolutionDocument1 pageHotelSolution: Induction Units VS Fan-Coil SolutionMoriyasu NguyenNo ratings yet
- Francis Bacon, Logic of SensationDocument2 pagesFrancis Bacon, Logic of SensationShrankhla NaryaNo ratings yet
- HW1Document8 pagesHW1Anonymous fXSlye100% (1)
- GE Lighting Systems Brevard Series Spec Sheet 12-74Document2 pagesGE Lighting Systems Brevard Series Spec Sheet 12-74Alan MastersNo ratings yet
- Wiring DiagramDocument24 pagesWiring DiagramReji Raju0% (1)
- HP Officejet Pro X476 X576 TroubleshootingDocument152 pagesHP Officejet Pro X476 X576 Troubleshootingjason7493No ratings yet
- Nonnewtonian and Newtonian Blood Flow in Human Aorta A Transient AnalysisDocument10 pagesNonnewtonian and Newtonian Blood Flow in Human Aorta A Transient AnalysisDivyaVatsNo ratings yet
- A Method of Solving Certain Nonlinear DiophantineDocument3 pagesA Method of Solving Certain Nonlinear DiophantineArsh TewariNo ratings yet
- Single Disc Clutch DesignDocument32 pagesSingle Disc Clutch DesignWeins GemerlapNo ratings yet
- A Potential Attenuation Equation For Design and Analysis of Pipeline Cathodic Protection Systems With Displaced An (51300-03197-Sg)Document18 pagesA Potential Attenuation Equation For Design and Analysis of Pipeline Cathodic Protection Systems With Displaced An (51300-03197-Sg)rachedNo ratings yet
- Precision Thermometers CatalogueDocument44 pagesPrecision Thermometers CataloguemarthaNo ratings yet
- Abdel Jawad 2005Document8 pagesAbdel Jawad 2005Alberto Tupa OrtizNo ratings yet
- Factors that Determine Paper StrengthDocument23 pagesFactors that Determine Paper StrengthNur Ariesman Salleh100% (2)
- Fourier Series ApplicationDocument10 pagesFourier Series Application9th P/C completedNo ratings yet
- Chapter 4: Dynamics: Force and Newton'S Laws of Motion: Net F Ma (63.0 KG) (4.20 M/s ) 265 NDocument15 pagesChapter 4: Dynamics: Force and Newton'S Laws of Motion: Net F Ma (63.0 KG) (4.20 M/s ) 265 NCedric KouakouNo ratings yet
- Review: Modeling Damping in Mechanical Engineering StructuresDocument10 pagesReview: Modeling Damping in Mechanical Engineering Structuresuamiranda3518No ratings yet
- S P I C e J e T Q U e S T I o N SDocument43 pagesS P I C e J e T Q U e S T I o N SDharavGosaliaNo ratings yet
- Lab 6 SpectrophotometerDocument11 pagesLab 6 SpectrophotometerChing Wai YongNo ratings yet
- Applications of Nano Biotechnology in Wastewater Treatment PDFDocument9 pagesApplications of Nano Biotechnology in Wastewater Treatment PDFswaroop_exlncNo ratings yet
- Soil Nail Wall - Soil Nailing - Deep ExcavationDocument7 pagesSoil Nail Wall - Soil Nailing - Deep ExcavationAlok Mehta0% (1)
- Fourier Transform and Its Medical ApplicationDocument55 pagesFourier Transform and Its Medical Applicationadriveros100% (1)
- Problems On Beams PDFDocument16 pagesProblems On Beams PDFC j50% (6)
- Aspect ManualDocument444 pagesAspect ManualArijit LaikNo ratings yet
- Chemical Engineering Magazine Abril 2009 PDFDocument108 pagesChemical Engineering Magazine Abril 2009 PDFFélix Vargas Santillán100% (1)
- Mock Tests 20 20 Class 9 Science SampleDocument13 pagesMock Tests 20 20 Class 9 Science SamplesrilathaNo ratings yet
- Dosing Pump Innovata Drive ConceptDocument5 pagesDosing Pump Innovata Drive ConceptgarpNo ratings yet
- BHEL Haridwar Block 2 Heavy Fabrication, Training ReportDocument53 pagesBHEL Haridwar Block 2 Heavy Fabrication, Training ReportUdit Soni100% (5)