You might also like
- IOActive Car Hacking PooriesDocument26 pagesIOActive Car Hacking PooriesCruizByte Mobility Solutions Private LimitedNo ratings yet
- Unbrick MTK PDFDocument3 pagesUnbrick MTK PDFAbraham SwayNo ratings yet
- USB to UART Bridges Simplify ConnectivityDocument37 pagesUSB to UART Bridges Simplify ConnectivityChy DalleNo ratings yet
- Convert An ATX Power Supply Into A Regular DC PowerDocument11 pagesConvert An ATX Power Supply Into A Regular DC PowerhelderruiNo ratings yet
- Updated Brushless Controller Schematic 2015 DIY Electric Car, Masina ElectricaDocument32 pagesUpdated Brushless Controller Schematic 2015 DIY Electric Car, Masina ElectricaSyed Hassan TariqNo ratings yet
- Replace The Emmc ChipDocument6 pagesReplace The Emmc ChipCostin VasilescuNo ratings yet
- Samsung How To Use Odin Downloader - Official WebsiteDocument10 pagesSamsung How To Use Odin Downloader - Official WebsitePapa Sissao SeckNo ratings yet
- USB Boot Tool Manual 1.4 enDocument21 pagesUSB Boot Tool Manual 1.4 enpepe2kNo ratings yet
- MF 5460Document586 pagesMF 5460Maximiliano Hitschfeld100% (2)
- FF AR Parrot 2 DroneDocument48 pagesFF AR Parrot 2 DroneengrdocNo ratings yet
- Mastercam Book 5 Axis Bai 1Document31 pagesMastercam Book 5 Axis Bai 1tuanvn76100% (3)
- A 10 Minute Book On How To Make ProgressDocument25 pagesA 10 Minute Book On How To Make ProgressJudette Camba100% (1)
- Design Stress and FatigueDocument30 pagesDesign Stress and FatigueAshok DargarNo ratings yet
- IPAD2Document42 pagesIPAD2suysuy00No ratings yet
- The Ultimate User Guide of VESCDocument4 pagesThe Ultimate User Guide of VESCriverbendfcNo ratings yet
- Navi Maps Update - FSC Code Generation InstructionsDocument3 pagesNavi Maps Update - FSC Code Generation InstructionskenjyaitcNo ratings yet
- Understanding ESC and VESCDocument8 pagesUnderstanding ESC and VESCriverbendfcNo ratings yet
- Arduino UNO WorkingDocument6 pagesArduino UNO WorkingSssNo ratings yet
- Schem, MLB - Ldo, K6: Schematic / PCB #'SDocument80 pagesSchem, MLB - Ldo, K6: Schematic / PCB #'SJoão Pedro Oliveira100% (2)
- BeagleBone BlackDocument117 pagesBeagleBone Blackjupiter8053No ratings yet
- BeagleBone Black Running Ubuntu, Part 1Document4 pagesBeagleBone Black Running Ubuntu, Part 1Raymond T. Hightower100% (1)
- Docks and Adapters - Intel-It-Explores-Thunderbolt-3-Technology-Benefits-PaperDocument5 pagesDocks and Adapters - Intel-It-Explores-Thunderbolt-3-Technology-Benefits-Paperadf100% (1)
- Power Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageFrom EverandPower Electronics Applied to Industrial Systems and Transports: Volume 5: Measurement Circuits, Safeguards and Energy StorageNo ratings yet
- PreviewpdfDocument50 pagesPreviewpdfMarcosGouvea100% (1)
- OSC48xx USB Oscilloscopes/Data Loggers with 20MHz BandwidthDocument20 pagesOSC48xx USB Oscilloscopes/Data Loggers with 20MHz BandwidthArturo EspinoNo ratings yet
- Esp0101s Relay Module TutorialDocument3 pagesEsp0101s Relay Module TutorialJacob Jack YoshaNo ratings yet
- Document E202 - 2008: Building Information Modeling Protocol ExhibitDocument9 pagesDocument E202 - 2008: Building Information Modeling Protocol ExhibitAndres Cedeno TutivenNo ratings yet
- RAN KPI MonitorDocument8 pagesRAN KPI MonitorOmer WaqarNo ratings yet
- Lisa-Operation Manual: Installation and Operation Instructions (Part B)Document41 pagesLisa-Operation Manual: Installation and Operation Instructions (Part B)majdNo ratings yet
- Alarm Notification BlynkDocument7 pagesAlarm Notification Blynkjaka.pamungkas6990No ratings yet
- Volantex ESC Manual PDFDocument8 pagesVolantex ESC Manual PDFCameron Clarke0% (1)
- Boot Reference ListDocument6 pagesBoot Reference ListAdal Broke TruthsNo ratings yet
- Panel Samsung Lsc320an01 1Document24 pagesPanel Samsung Lsc320an01 1Mustafa AffandiNo ratings yet
- CatchBEST Camera API Programming IntroductionDocument23 pagesCatchBEST Camera API Programming IntroductionK'rlo EscaNo ratings yet
- EMMC Download Tool User ManualDocument5 pagesEMMC Download Tool User ManualMartin Cortex LuleyNo ratings yet
- Manual - Samsung Galaxy Tab A7Document130 pagesManual - Samsung Galaxy Tab A7Hazel Aikulola Griffith100% (1)
- MANUAL Updation For Galaxy Tab (p1000) Into 2.3Document12 pagesMANUAL Updation For Galaxy Tab (p1000) Into 2.30takecil179No ratings yet
- Codigo Hexadecimal para EepromDocument3 pagesCodigo Hexadecimal para EepromFranciss Jr. Velasco HernandezNo ratings yet
- BLDC Motors Controller Bxsd-Program Software ManualDocument5 pagesBLDC Motors Controller Bxsd-Program Software ManualAgi TriwibowoNo ratings yet
- Z3 Compact Component Replacement 009Document13 pagesZ3 Compact Component Replacement 009Rostã Farias100% (1)
- Esp 32 NotesDocument4 pagesEsp 32 NotesChuck_YoungNo ratings yet
- Sharp Sd-At1000 PDFDocument72 pagesSharp Sd-At1000 PDFRoman Torres AspirosNo ratings yet
- How To Install ADB, Fastboot and Drivers in Few Seconds PDFDocument1 pageHow To Install ADB, Fastboot and Drivers in Few Seconds PDFdbmNo ratings yet
- Advanced View Pic Microcontroller 1992 Projects List - PIC MicrocontrollerDocument235 pagesAdvanced View Pic Microcontroller 1992 Projects List - PIC MicrocontrollerBilal AfzalNo ratings yet
- Panasonic Cq-Ts0920ab Toyota SM PDFDocument36 pagesPanasonic Cq-Ts0920ab Toyota SM PDFsantiago962No ratings yet
- Sub-$50 DIY 10hz Bluetooth GPS Receiver - Did It MyselfDocument11 pagesSub-$50 DIY 10hz Bluetooth GPS Receiver - Did It MyselfYogesh DoneNo ratings yet
- Robot OttoDocument17 pagesRobot OttoMarcio ScarduaNo ratings yet
- Updating Firmware of SIM808 BT FunctionDocument9 pagesUpdating Firmware of SIM808 BT FunctionStefan S KiralyNo ratings yet
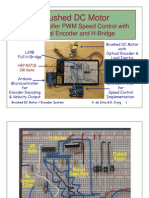
- Brushed DC Motor Speed Control with Encoder and H-BridgeDocument50 pagesBrushed DC Motor Speed Control with Encoder and H-BridgeMohammed Benlamlih100% (7)
- (Hi10 Plus) (TUTORIAL) Remove Windows On The Dual Boot Tablet. - Download&Support - CHUWI - Official ForumDocument5 pages(Hi10 Plus) (TUTORIAL) Remove Windows On The Dual Boot Tablet. - Download&Support - CHUWI - Official ForumDerek N LynchNo ratings yet
- Serial Port VB PDFDocument5 pagesSerial Port VB PDFManish NarkhedeNo ratings yet
- Xiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30Document1 pageXiaomi M365 Mi Scooter 2 Classic-Pro - Research of Spare MOSFETs - v1.0.4 Final - 2019-09-30JGSoftNo ratings yet
- BLDC Motor Open Loop ControlDocument20 pagesBLDC Motor Open Loop ControlShiva SuryaNo ratings yet
- Uninstall bloatware docomo oreoDocument1 pageUninstall bloatware docomo oreoDaffa AfrialNo ratings yet
- All Fastboot Commands, You Should Know. - Complete ThingsDocument7 pagesAll Fastboot Commands, You Should Know. - Complete ThingsEdgar VigoNo ratings yet
- Quick Start Guide - Kawasaki Jet SkisDocument13 pagesQuick Start Guide - Kawasaki Jet SkisHaingNo ratings yet
- MacBook Pro 15Document9 pagesMacBook Pro 15jdpardo100% (1)
- CEMB DWA1000XL Wheel Alignment ManualDocument65 pagesCEMB DWA1000XL Wheel Alignment ManualMáximo MéndezNo ratings yet
- Microcontroller (AT89S52) Based Remote Notice Board Using GSMDocument72 pagesMicrocontroller (AT89S52) Based Remote Notice Board Using GSMAkshayNo ratings yet
- Repairing With secureCRT PDFDocument17 pagesRepairing With secureCRT PDFRohit Suman100% (1)
- RS232 Smartcard Reader CircuitDocument6 pagesRS232 Smartcard Reader Circuitmrshare2010No ratings yet
- Smart JIG Power DiagnosisDocument102 pagesSmart JIG Power DiagnosisNicu LiviuNo ratings yet
- Nand Flash GuideDocument11 pagesNand Flash GuideAmirNo ratings yet
- Pull-Up and Pull-Down Resistors For Micro Controllers by ShanDocument3 pagesPull-Up and Pull-Down Resistors For Micro Controllers by Shanshantilaal100% (1)
- 30A BLDC ESC Product Manual PDFDocument9 pages30A BLDC ESC Product Manual PDFPePe Eduardo Mendoza EstradaNo ratings yet
- Controleur QUATRO Not-3 + HUBDocument3 pagesControleur QUATRO Not-3 + HUBPouilly EricNo ratings yet
- Duration of LTMDocument3 pagesDuration of LTMsamueldaNo ratings yet
- Features Description: LT3598 6-String 30ma LED Driver With 1.5% Current MatchingDocument24 pagesFeatures Description: LT3598 6-String 30ma LED Driver With 1.5% Current MatchingMick Thomson RcNo ratings yet
- Elon Musk: AI Is A Fundamental Risk To The Existence of Human CivilizationDocument19 pagesElon Musk: AI Is A Fundamental Risk To The Existence of Human CivilizationBDApp StarNo ratings yet
- DHP UM 015 IHP24 HART User ManualDocument70 pagesDHP UM 015 IHP24 HART User Manualkumar ambujNo ratings yet
- Phy433 Lab Report 1Document9 pagesPhy433 Lab Report 1rabbani abdul rahimNo ratings yet
- Project Synopsis: "Employee Motivation at Syndicate Bank"Document5 pagesProject Synopsis: "Employee Motivation at Syndicate Bank"SubhamSahaNo ratings yet
- PowerFlex 4M LabDocument22 pagesPowerFlex 4M Labmaria laura delgado morenoNo ratings yet
- Line BalancingDocument21 pagesLine Balancingarno6antonio6spinaNo ratings yet
- 9608/21/M/J/15 © Ucles 2015Document57 pages9608/21/M/J/15 © Ucles 2015Asilbek AshurovNo ratings yet
- OAF Hello Word Page PDFDocument20 pagesOAF Hello Word Page PDFNaveen KumarNo ratings yet
- Prologue - Life InsuranceDocument4 pagesPrologue - Life InsuranceCamila Andrea Sarmiento BetancourtNo ratings yet
- TDS VH202 Steel Spore Discs B - Atrophaeus Cell Line 9372 SDN 06 Rev. 1.0Document3 pagesTDS VH202 Steel Spore Discs B - Atrophaeus Cell Line 9372 SDN 06 Rev. 1.0Muhammad FirdausNo ratings yet
- Baumann Forklift Dx50!14!40 S N 5361 Spare Parts CatalogueDocument22 pagesBaumann Forklift Dx50!14!40 S N 5361 Spare Parts Catalogueanneclark120297mgz100% (108)
- Decision Tree Classifier On Private DataDocument8 pagesDecision Tree Classifier On Private DataBianca RodriguesNo ratings yet
- Stress Amongst Healthcare Professionals and Migrant Workers During Covid-19 PandemicDocument6 pagesStress Amongst Healthcare Professionals and Migrant Workers During Covid-19 PandemicIJAR JOURNALNo ratings yet
- Design Prof BlankoDocument11 pagesDesign Prof BlankoAousten AAtenNo ratings yet
- SNS Bank XS0382843802Document7 pagesSNS Bank XS0382843802Southey CapitalNo ratings yet
- 03 - Gherkin An OverviewDocument19 pages03 - Gherkin An OverviewArunkumar KrishnamoorthyNo ratings yet
- International Financial Management 7th Edition Eun Test BankDocument25 pagesInternational Financial Management 7th Edition Eun Test BankMatthewRosarioksdf100% (58)
- Learn About Steganography TechniquesDocument11 pagesLearn About Steganography TechniquesashaNo ratings yet
- Qc-Sop-0 - Drilling of PoleDocument7 pagesQc-Sop-0 - Drilling of PoleAmeerHamzaWarraichNo ratings yet
- Ty 9900Document4 pagesTy 9900Samir DarweshNo ratings yet