You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Pumpkin Cultivation and PracticesDocument11 pagesPumpkin Cultivation and PracticesGhorpade GsmNo ratings yet
- Faculty Performance Appraisal Report (Draft1)Document3 pagesFaculty Performance Appraisal Report (Draft1)mina dote100% (1)
- Amt in A Nutshell - ExplainedDocument2 pagesAmt in A Nutshell - ExplainedMis El100% (2)
- PROCEMAC PT Spare Parts ManualDocument27 pagesPROCEMAC PT Spare Parts ManualMauricio CruzNo ratings yet
- 5d814c4d6437b300fd0e227a - Scorch Product Sheet 512GB PDFDocument1 page5d814c4d6437b300fd0e227a - Scorch Product Sheet 512GB PDFBobby B. BrownNo ratings yet
- Archer AX53 (EU) 1.0 - DatasheetDocument7 pagesArcher AX53 (EU) 1.0 - DatasheetLucNo ratings yet
- Paper 1 - 2017 EETDocument10 pagesPaper 1 - 2017 EETRayNo ratings yet
- Document 3Document6 pagesDocument 3Nurjaman SyahidanNo ratings yet
- PDF 24Document8 pagesPDF 24Nandan ReddyNo ratings yet
- Buyer Persona TemplateDocument18 pagesBuyer Persona TemplateH ANo ratings yet
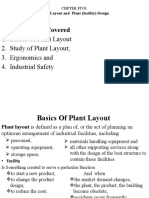
- Misurata UniversityDocument11 pagesMisurata UniversityDustin EllisNo ratings yet
- Chapter 5Document20 pagesChapter 5Berihu GirmayNo ratings yet
- Submersible Sewage Ejector Pump: Pump Installation and Service ManualDocument8 pagesSubmersible Sewage Ejector Pump: Pump Installation and Service Manualallen_worstNo ratings yet
- 9.2 Chalk DustDocument18 pages9.2 Chalk DustDane NarzolesNo ratings yet
- Graphene/Metal Organic Framework Composites As Adsorbents For Adsorption Chiller ApplicationsDocument88 pagesGraphene/Metal Organic Framework Composites As Adsorbents For Adsorption Chiller ApplicationsNajam Ul QadirNo ratings yet
- (E-Brochure) Ginza HillDocument6 pages(E-Brochure) Ginza HillRenald 'Renald' RenaldNo ratings yet
- MBFI Quiz KeyDocument7 pagesMBFI Quiz Keypunitha_pNo ratings yet
- Tire Size ComparisonDocument1 pageTire Size ComparisonBudi DarmawanNo ratings yet
- INCOME TAX AND GST. JURAZ-Module 4Document8 pagesINCOME TAX AND GST. JURAZ-Module 4TERZO IncNo ratings yet
- Case Study: Meera P NairDocument9 pagesCase Study: Meera P Nairnanditha menonNo ratings yet
- 2UEB000133 ACS2000 4kV Motor Temp Supervision Rev BDocument3 pages2UEB000133 ACS2000 4kV Motor Temp Supervision Rev BSherifNo ratings yet
- LETTEROFGUARANTEEDocument1 pageLETTEROFGUARANTEELim DongseopNo ratings yet
- BA5411 ProjectGuidelines - 2020 PDFDocument46 pagesBA5411 ProjectGuidelines - 2020 PDFMonisha ReddyNo ratings yet
- Lucrare de DiplomaDocument99 pagesLucrare de DiplomarashcapurNo ratings yet
- MN502 Lecture 3 Basic CryptographyDocument45 pagesMN502 Lecture 3 Basic CryptographySajan JoshiNo ratings yet
- Exercise 3 - Binary Coded DecimalDocument3 pagesExercise 3 - Binary Coded DecimalNaiomi RaquinioNo ratings yet
- Nogales V Capitol Medical CenterDocument2 pagesNogales V Capitol Medical CenterGraceNo ratings yet
- The Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Document8 pagesThe Green Wall - Story and Photos by Stephen James Independent Investigative Journalism & Photography - VC Reporter - Ventura County Weekly - California Department of Corrections whistleblower D.J. Vodicka and his litigation against the CDC.Stephen James - Independent Investigative Journalism & PhotographyNo ratings yet
- 6.T24 Common Variables-R14Document29 pages6.T24 Common Variables-R14Med Mehdi LaazizNo ratings yet
- Challenges Students Face in Conducting A Literature ReviewDocument6 pagesChallenges Students Face in Conducting A Literature ReviewafdtunqhoNo ratings yet