You might also like
- Dissertation Thesis Maioglou Dimitrios MSC SPD 2017 1106140007Document67 pagesDissertation Thesis Maioglou Dimitrios MSC SPD 2017 1106140007BIKASH100% (2)
- Exploring Bentley STAAD.Pro CONNECT Edition, 3rd EditionFrom EverandExploring Bentley STAAD.Pro CONNECT Edition, 3rd EditionRating: 5 out of 5 stars5/5 (3)
- Bondek Design Manual 2003Document132 pagesBondek Design Manual 2003Lawrence2011No ratings yet
- ASTM E92-17 Standard Test Methods For Vickers Hardness and Knoop Hardness of Metallic MaterialsDocument27 pagesASTM E92-17 Standard Test Methods For Vickers Hardness and Knoop Hardness of Metallic MaterialsCarlos Pinto Pradilla88% (8)
- Moving From Land Desktop Companion To Civil 3DDocument136 pagesMoving From Land Desktop Companion To Civil 3DFlavia Dumitreasa100% (1)
- SSP 099 18 Tfsi 132kw 20 Tfsi 162kw Ea888Document60 pagesSSP 099 18 Tfsi 132kw 20 Tfsi 162kw Ea888Jose Ramón Orenes ClementeNo ratings yet
- Car Seat DesignDocument70 pagesCar Seat DesignKasi Balamurugan100% (1)
- Formula SAE - Design Overview and Project ManagementDocument162 pagesFormula SAE - Design Overview and Project ManagementGregory Aguilera Lopes100% (1)
- ADAPT-Builder 2019 Tutorial - Single-Level Two-Way SlabDocument188 pagesADAPT-Builder 2019 Tutorial - Single-Level Two-Way Slabephrem100% (1)
- Steel StackDocument4 pagesSteel Stacksimonetta_nardi0% (1)
- Solidworks 2003 ManualDocument95 pagesSolidworks 2003 ManualPhạm Văn ĐảngNo ratings yet
- AutoCAD MEP User GuideDocument878 pagesAutoCAD MEP User GuideTudor DerencuNo ratings yet
- CSi DetailerDocument85 pagesCSi DetailerAlex Safca100% (1)
- Concrete Frame Design Manual: CSA A23.3-04Document95 pagesConcrete Frame Design Manual: CSA A23.3-04Julian Felipe Beltran MonteroNo ratings yet
- Building Designer Engineer's HandbookDocument282 pagesBuilding Designer Engineer's HandbookRamilArtates100% (3)
- Multi-Discipline Supports Customisation GuideDocument32 pagesMulti-Discipline Supports Customisation GuideManny MendozaNo ratings yet
- The Re-Design and Analysis of The Suspension System On The Formula Student Race CarDocument53 pagesThe Re-Design and Analysis of The Suspension System On The Formula Student Race CarPabloNo ratings yet
- Aerodynamic Analysis and Optimisation of The Rear Wing of A WRC CarDocument81 pagesAerodynamic Analysis and Optimisation of The Rear Wing of A WRC CarVyssionNo ratings yet
- FSAE Design and OptimizationDocument51 pagesFSAE Design and OptimizationLizHuangNo ratings yet
- Smartdek Design ManualDocument48 pagesSmartdek Design ManualranddyNo ratings yet
- Machine design project on bevel driven screw jackDocument68 pagesMachine design project on bevel driven screw jacksamuel100% (1)
- Everett Civil CAD Standards - 2018 - 201806220925365186Document82 pagesEverett Civil CAD Standards - 2018 - 201806220925365186Reynaldo CastilloNo ratings yet
- Intro Creo ElementsProDocument256 pagesIntro Creo ElementsProjatinjdmNo ratings yet
- Elias and Abawu Sliding Mesh Gear Box Design FinalDocument142 pagesElias and Abawu Sliding Mesh Gear Box Design FinalHenok Ghiday83% (6)
- Ricoh 2090Document832 pagesRicoh 2090cosmin176100% (1)
- Old Dominion University Sae Baja DesignDocument40 pagesOld Dominion University Sae Baja DesignShreepal ChilaNo ratings yet
- NYCD (Now You Can Drive) : Department of Computer Science COMSATS University Islamabad, Lahore CampusDocument85 pagesNYCD (Now You Can Drive) : Department of Computer Science COMSATS University Islamabad, Lahore CampusSubhan AhmadNo ratings yet
- Henok Shiferaw BestDocument156 pagesHenok Shiferaw BestabrhamNo ratings yet
- CAD BASED DESIGN OF WELDING FIXTURESDocument53 pagesCAD BASED DESIGN OF WELDING FIXTURESachyutreddy2001No ratings yet
- ASME Soccer Robot - Group V PDFDocument54 pagesASME Soccer Robot - Group V PDFTan Tien NguyenNo ratings yet
- Advance Design Starting GuideDocument50 pagesAdvance Design Starting GuideLeu KeosovannarathNo ratings yet
- DSGN Course NotesDocument54 pagesDSGN Course NotesUsman KhanNo ratings yet
- Major Project Format NewDocument29 pagesMajor Project Format NewASHIMA GUPTANo ratings yet
- AkaBot 2.0 - Pet 3D Printing Filament From Waste PlasticDocument120 pagesAkaBot 2.0 - Pet 3D Printing Filament From Waste Plasticpissoff69No ratings yet
- Public Walla Walla Civil Best PracticesDocument210 pagesPublic Walla Walla Civil Best PracticesDejanPrckovicNo ratings yet
- FInal Project Report - B.Tech Mechanical EnggDocument70 pagesFInal Project Report - B.Tech Mechanical EnggEngineers SolutionNo ratings yet
- Detailed Design ProjectDocument58 pagesDetailed Design ProjectMintesinot T GebreNo ratings yet
- Safowan AhmedDocument23 pagesSafowan Ahmedtmipocha2001No ratings yet
- The University of Akron 2015 SAE Zips Baja Off-Road Racing Team 2015 Suspension System DesignDocument44 pagesThe University of Akron 2015 SAE Zips Baja Off-Road Racing Team 2015 Suspension System DesignPrashant DubeyNo ratings yet
- A-18 Ababeel (AVD Final Report)Document107 pagesA-18 Ababeel (AVD Final Report)noor_mujahidNo ratings yet
- Autocad Mech 2009 UserguideDocument414 pagesAutocad Mech 2009 UserguideJose OlivarNo ratings yet
- Design Optimization of A Connecting Rod For Internal Combustion Engine (001-020)Document20 pagesDesign Optimization of A Connecting Rod For Internal Combustion Engine (001-020)ACALCEGARNo ratings yet
- SG Vu ReportDocument57 pagesSG Vu ReportVinod ShivdasaniNo ratings yet
- Structural Behavior of Bubbledeck Slabs and Their Application To Lightweight Bridge DecksDocument42 pagesStructural Behavior of Bubbledeck Slabs and Their Application To Lightweight Bridge Deckscewaleed2590No ratings yet
- Designing Jigs and Fixtures 3d PrintingDocument18 pagesDesigning Jigs and Fixtures 3d Printingpriyanshi11090No ratings yet
- JCSS Model Development GuideDocument264 pagesJCSS Model Development GuidevelayyaNo ratings yet
- CO2 Car Project Workbook 2010 ENGDocument178 pagesCO2 Car Project Workbook 2010 ENGhamidhard100% (2)
- University of Southern Queensland Faculty of Engineering & SurveyingDocument116 pagesUniversity of Southern Queensland Faculty of Engineering & SurveyingJakša TomovićNo ratings yet
- Fea in Practice 2011 Instructor ManualDocument266 pagesFea in Practice 2011 Instructor ManualPablo PiresNo ratings yet
- Hardware Graduation ReportDocument23 pagesHardware Graduation ReportAbdullah HammadiNo ratings yet
- A Practical Guide For Using MicroStation XMDocument162 pagesA Practical Guide For Using MicroStation XMnurul_suhariNo ratings yet
- AOTC AutoCAD Civil 3D 2009 Interchange Design-TOC PDFDocument10 pagesAOTC AutoCAD Civil 3D 2009 Interchange Design-TOC PDFTuan PnNo ratings yet
- Mechanical Scissor Jack Project 4 YearsDocument65 pagesMechanical Scissor Jack Project 4 YearslatiyohannesNo ratings yet
- Autodesk Inventor Professional 2020 for Designers, 20th EditionFrom EverandAutodesk Inventor Professional 2020 for Designers, 20th EditionNo ratings yet
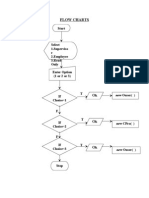
- Flow Charts Option: StartDocument13 pagesFlow Charts Option: StartbalabooksNo ratings yet
- Bel Adv Details For Senior Assistant Engineer Posts - Jobalertshub 2Document5 pagesBel Adv Details For Senior Assistant Engineer Posts - Jobalertshub 2Palani AppanNo ratings yet
- Pure Chem p2 - 26pgDocument26 pagesPure Chem p2 - 26pgJhomer CrespoNo ratings yet
- Ejercicios Propuestos Temas Hasta Primer PrevioDocument2 pagesEjercicios Propuestos Temas Hasta Primer PrevioJuan De DiosNo ratings yet
- SN 761672 ADocument19 pagesSN 761672 ANhất TríNo ratings yet
- Modified 0-30V - 0-3A Variable Power Supply - Rev.2Document2 pagesModified 0-30V - 0-3A Variable Power Supply - Rev.2Manuel Cereijo NeiraNo ratings yet
- Contactor Cap Lc1dDocument4 pagesContactor Cap Lc1dAlfiansyah Dharma Setia DjaketraNo ratings yet
- Deterministic Inventory Control FormulasDocument6 pagesDeterministic Inventory Control FormulasvivekNo ratings yet
- Us01cphy02 Unit 1 2014 THPDocument18 pagesUs01cphy02 Unit 1 2014 THPapi-264723824No ratings yet
- Under Water WeldingDocument23 pagesUnder Water WeldingNishanth GowdaNo ratings yet
- Mktech Is1-19Hd & Receptor: Receptor PVR de Satelit Si Semnal Terestru Raport de TestareDocument7 pagesMktech Is1-19Hd & Receptor: Receptor PVR de Satelit Si Semnal Terestru Raport de TestareAlexander WieseNo ratings yet
- RT 50Document2 pagesRT 50valentin prouteauNo ratings yet
- FM Global Property Loss Prevention Data Sheets: List of FiguresDocument12 pagesFM Global Property Loss Prevention Data Sheets: List of Figuresdaniela hritucNo ratings yet
- Price Quotation: Quote/Project Description Ref. Details: Project DetailDocument3 pagesPrice Quotation: Quote/Project Description Ref. Details: Project DetailAhmad AyyoubNo ratings yet
- 07 AlarmManagement enDocument39 pages07 AlarmManagement enLuis RodriguezNo ratings yet
- CS As Corporate Saviour - Oil and Gas Industry PDFDocument48 pagesCS As Corporate Saviour - Oil and Gas Industry PDFBalraj JNo ratings yet
- 2010 Xstrata VOD Implementation - BartschDocument35 pages2010 Xstrata VOD Implementation - BartschFlávia GomesNo ratings yet
- Process Level ChartDocument2 pagesProcess Level ChartzaidinNo ratings yet
- Sheds Direct Ireland's Wooden BrochureDocument12 pagesSheds Direct Ireland's Wooden BrochureVictor Celestino Montañez CarranzaNo ratings yet
- Metronidazole AnalysisDocument5 pagesMetronidazole AnalysisHendri WasitoNo ratings yet
- 625-NR Consolidated NovemberDocument321 pages625-NR Consolidated NovemberArturoNo ratings yet
- Dokumen - Tips Carte Ford C Max 2007Document278 pagesDokumen - Tips Carte Ford C Max 2007Rostás MiklósNo ratings yet
- A ProcessDocument41 pagesA ProcessjulioNo ratings yet
- UDR MANUFACTURE ManufacturesDocument8 pagesUDR MANUFACTURE ManufacturesQuadri Consultancy ServicesNo ratings yet
- Dwarkadas J Sanghvi College of Engineering Provisional Merit ListDocument4 pagesDwarkadas J Sanghvi College of Engineering Provisional Merit ListSharth NairNo ratings yet
- Software TestingDocument3 pagesSoftware TestingDr. P. N. Renjith Associate Professor - CSENo ratings yet
- 59-Form and Plot Frame Editor PDFDocument70 pages59-Form and Plot Frame Editor PDFAries TsaiNo ratings yet