You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Fem Analysis of Jack-Up Spudcane Penetration PDFDocument10 pagesFem Analysis of Jack-Up Spudcane Penetration PDFSơn Nguyễn-LêNo ratings yet
- Astm 239 PreceeDocument4 pagesAstm 239 PreceeJesus Antonio Zuniga Martinez100% (1)
- Machine DesignDocument97 pagesMachine DesignGourav Kapoor100% (4)
- 3-d ElasticityDocument40 pages3-d Elasticityp_sahoo8686No ratings yet
- Beam DeflectionDocument30 pagesBeam DeflectiontruptiNo ratings yet
- Optical Properties and Spectroscopy of NanomaterialsDocument35 pagesOptical Properties and Spectroscopy of Nanomaterialsقاسم فوزيNo ratings yet
- Thermal InsulationDocument28 pagesThermal Insulationferozbabu100% (2)
- StoichiometryDocument16 pagesStoichiometryRinzel A MalbasNo ratings yet
- A Transfer-Matrix Approach For Estimating The Characteristic Impedance and Wave Numbers of Limp and Rigid Porous MaterialsDocument22 pagesA Transfer-Matrix Approach For Estimating The Characteristic Impedance and Wave Numbers of Limp and Rigid Porous MaterialsTrupti IngleNo ratings yet
- 10mock TcyDocument24 pages10mock TcytruptiNo ratings yet
- Setupand Postprocessing and LabviewDocument11 pagesSetupand Postprocessing and LabviewtruptiNo ratings yet
- Good For Basics On SelectionDocument15 pagesGood For Basics On SelectiontruptiNo ratings yet
- Setupand Postprocessing and LabviewDocument11 pagesSetupand Postprocessing and LabviewtruptiNo ratings yet
- Absorption MeasDocument6 pagesAbsorption Measkalyan1990No ratings yet
- A Transfer-Matrix Approach For Estimating The Characteristic Impedance and Wave Numbers of Limp and Rigid Porous MaterialsDocument22 pagesA Transfer-Matrix Approach For Estimating The Characteristic Impedance and Wave Numbers of Limp and Rigid Porous MaterialsTrupti IngleNo ratings yet
- 3.4 HvacDocument8 pages3.4 HvacShehryar01No ratings yet
- Airborne Sound Part1Document54 pagesAirborne Sound Part1truptiNo ratings yet
- Heat ExchangerDocument5 pagesHeat ExchangertruptiNo ratings yet
- Ch3graphical Linkage SynthesisDocument105 pagesCh3graphical Linkage SynthesisVishal PawarNo ratings yet
- MAE 343 - Class 8Document17 pagesMAE 343 - Class 8truptiNo ratings yet
- Problems1 5Document76 pagesProblems1 5saroop23No ratings yet
- Design and Fabrication of Six Leg Kinematic Moving MachineDocument3 pagesDesign and Fabrication of Six Leg Kinematic Moving MachineMahesh Waran0% (1)
- 11 Energy MethodsDocument31 pages11 Energy Methodstigin100% (2)
- 8 Fourier SolutionDocument12 pages8 Fourier SolutiontruptiNo ratings yet
- Final ReportDocument64 pagesFinal ReporttruptiNo ratings yet
- PEDJ0100Document9 pagesPEDJ0100SQ YosbdNo ratings yet
- Supersonic Aircraft Line Spacing 1Document9 pagesSupersonic Aircraft Line Spacing 1truptiNo ratings yet
- Experiment 4 TheoryDocument18 pagesExperiment 4 TheorytruptiNo ratings yet
- Design and Fabrication of Six Leg Kinematic Moving MachineDocument3 pagesDesign and Fabrication of Six Leg Kinematic Moving MachineMahesh Waran0% (1)
- Labs Strain GaugesDocument7 pagesLabs Strain GaugestruptiNo ratings yet
- ME2307 Lab Manual PDFDocument15 pagesME2307 Lab Manual PDFGowtham AnbuNo ratings yet
- 41i9-Efficient Usage of WasteDocument10 pages41i9-Efficient Usage of WasteIJAET Journal100% (1)
- Crack Detection in Uniform Cantilever BeamDocument10 pagesCrack Detection in Uniform Cantilever BeamtruptiNo ratings yet
- Supersonic PlanesDocument15 pagesSupersonic PlanestruptiNo ratings yet
- 11 Energy MethodsDocument31 pages11 Energy Methodstigin100% (2)
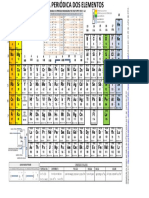
- Tabela Periódica Com Valores de NoxDocument1 pageTabela Periódica Com Valores de NoxSamuel ChiezaNo ratings yet
- MEASURE TP (Fixed)Document2 pagesMEASURE TP (Fixed)Trần Văn BìnhNo ratings yet
- Welded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForDocument5 pagesWelded Nickel and Nickel-Cobalt Alloy Pipe: Standard Specification ForZouhair BoukriNo ratings yet
- Learning Exemplar HEAT & TEMPERATURE MAVDocument5 pagesLearning Exemplar HEAT & TEMPERATURE MAVMark VillanuevaNo ratings yet
- Validated Spectroscopic Method For Estimation of Sumatriptan Succinate in Pure and From Tablet FormulationDocument3 pagesValidated Spectroscopic Method For Estimation of Sumatriptan Succinate in Pure and From Tablet FormulationPrabhuNo ratings yet
- Edwards SD TRK SD TRM Install 0957864312Document2 pagesEdwards SD TRK SD TRM Install 0957864312Anonymous PersonNo ratings yet
- Nuclear ChemistryDocument4 pagesNuclear ChemistryYe JinNo ratings yet
- DPP 1 State of MatterDocument2 pagesDPP 1 State of MatterLucky YadavNo ratings yet
- Use of Nanomaterials in Coatings 0 PDFDocument18 pagesUse of Nanomaterials in Coatings 0 PDFCong ChinhNo ratings yet
- Tandy 4301Document2 pagesTandy 4301Kamal PriyanNo ratings yet
- Analytical Tools Used For The Identification and Quantification of PectinDocument9 pagesAnalytical Tools Used For The Identification and Quantification of PectinEDUARD MIGUEL CHAVEZ AREDONo ratings yet
- 5991-5412ES Agilent LC Hardware SpanishDocument45 pages5991-5412ES Agilent LC Hardware SpanishDANIEL-LABJMENo ratings yet
- Grenzebach Patent 2005Document8 pagesGrenzebach Patent 2005Muhammed BALIKÇINo ratings yet
- 250ml Volumetric Analysis Standards and SolutionsDocument6 pages250ml Volumetric Analysis Standards and SolutionsSham SajaNo ratings yet
- Koord 17042019Document688 pagesKoord 17042019Totok GapuradianNo ratings yet
- Weekly Learning PlanDocument5 pagesWeekly Learning PlanRjane CañeteNo ratings yet
- Scirce All ChaptersDocument20 pagesScirce All ChaptersshirinNo ratings yet
- Compounds and Alloyds of MagnesiumDocument30 pagesCompounds and Alloyds of MagnesiumJudy PocquiasNo ratings yet
- Pceutics Grad Program Course Layout 08 03 2012Document4 pagesPceutics Grad Program Course Layout 08 03 2012PressCall AcademyNo ratings yet
- Sa 250Document33 pagesSa 250shamim imthiyasNo ratings yet
- Fabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedDocument8 pagesFabrication and Tribological Behavior of Al2O3 (MoS2-BaSO4) LaminatedMouna KallelNo ratings yet
- Polimers PDFDocument71 pagesPolimers PDFomer faruqeNo ratings yet
- Ip 225-76Document3 pagesIp 225-76Nguyen NguyenNo ratings yet
- Chapter 2 - MicrosDocument44 pagesChapter 2 - MicrosAkbar SaleemNo ratings yet
- Daiy Test Preparation - QuizzizDocument11 pagesDaiy Test Preparation - QuizzizJulyantho TundeNo ratings yet