You might also like
- M54649LDocument5 pagesM54649LAllan AlexNo ratings yet
- Data Sheet STK672Document21 pagesData Sheet STK672Mario Karma LeivaNo ratings yet
- AM5888SDocument10 pagesAM5888SproctepNo ratings yet
- Am5766 V1.6Document10 pagesAm5766 V1.6Paulo Roberto s freireNo ratings yet
- 5-CH BTL DRIVER FOR DVD PLAYER WITH DISC BIDIRECTIONAL DRIVER AND TWO VARIABLE REGULATORSDocument8 pages5-CH BTL DRIVER FOR DVD PLAYER WITH DISC BIDIRECTIONAL DRIVER AND TWO VARIABLE REGULATORSalbinicue1No ratings yet
- 5-channel BTL Driver for DVD player AM5868SDocument10 pages5-channel BTL Driver for DVD player AM5868SnoileksirtNo ratings yet
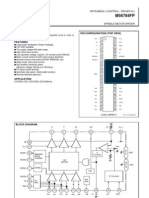
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocument11 pagesMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoNo ratings yet
- Solare DatasheetDocument25 pagesSolare Datasheetfb1145No ratings yet
- 74LVT2244, 74LVTH2244 Low Voltage Octal Buffer/Line Driver With 3-STATE Outputs and 25 Series Resistors in The OutputsDocument9 pages74LVT2244, 74LVTH2244 Low Voltage Octal Buffer/Line Driver With 3-STATE Outputs and 25 Series Resistors in The Outputsjovares2099No ratings yet
- LB1824 Motor DriverDocument10 pagesLB1824 Motor Driverwhynot05No ratings yet
- ZXSC410 420Document12 pagesZXSC410 420Catalin TirtanNo ratings yet
- IC200MDD840 and 843 VersaMax Ten 24VDC Inputs Six Relay Outputs gfk2540 PDFDocument2 pagesIC200MDD840 and 843 VersaMax Ten 24VDC Inputs Six Relay Outputs gfk2540 PDFJosé Alexis Valero VillanuevaNo ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- EN5322QI: 2 A Voltage Mode Synchronous Buck PWM DC-DC Converter With Integrated InductorDocument16 pagesEN5322QI: 2 A Voltage Mode Synchronous Buck PWM DC-DC Converter With Integrated Inductorcatsoithahuong84No ratings yet
- UDx2916 DatasheetDocument10 pagesUDx2916 DatasheetBruno NascimentoNo ratings yet
- 6-Channel Driver IC Controls CD-ROM MotorsDocument3 pages6-Channel Driver IC Controls CD-ROM Motorsdggiyvnxssr9222No ratings yet
- FAN8082 (KA3082N) : Bi-Directional DC Motor DriverDocument13 pagesFAN8082 (KA3082N) : Bi-Directional DC Motor DriverFrancisco Hernandez MartinezNo ratings yet
- LB1845 DDocument9 pagesLB1845 DFernando LizarragaNo ratings yet
- DVP20SX211RDocument8 pagesDVP20SX211RcurielvicNo ratings yet
- HT7L4811 Non-Isolation Buck LED Lighting Driver With Active PFCDocument12 pagesHT7L4811 Non-Isolation Buck LED Lighting Driver With Active PFCEnéas BaroneNo ratings yet
- F2-08SIM Input Simulator D2-08NA-1 AC InputDocument10 pagesF2-08SIM Input Simulator D2-08NA-1 AC InputVladimir Aliro Quezada CidNo ratings yet
- CXD3400N: 6-Channel CCD Vertical Clock DriverDocument9 pagesCXD3400N: 6-Channel CCD Vertical Clock DriverJaffer SultanNo ratings yet
- KA3100DTFDocument9 pagesKA3100DTFOsman KoçakNo ratings yet
- Ir1161lpbf - Infineon Solutions For Transportation 24V To 60VDocument25 pagesIr1161lpbf - Infineon Solutions For Transportation 24V To 60VAnonymous R0s4q9X8No ratings yet
- Synchronous Rectification DC/DC Converter IC For Charging Li-Ion BatteryDocument56 pagesSynchronous Rectification DC/DC Converter IC For Charging Li-Ion BatterydigenioNo ratings yet
- BL11923 Datasheet PDFDocument19 pagesBL11923 Datasheet PDFhieuhuech1No ratings yet
- Smartstep 2 Servo Drive DatasheetDocument12 pagesSmartstep 2 Servo Drive DatasheetTio_louis32No ratings yet
- LC72121 - PLL Frequency Synthesizers For Electronic TuningDocument24 pagesLC72121 - PLL Frequency Synthesizers For Electronic TuningBảo BìnhNo ratings yet
- STK681-210-E: Forward/Reverse Motor DriverDocument0 pagesSTK681-210-E: Forward/Reverse Motor Driverfredy51No ratings yet
- Datasheet Search Site - WWW - AlldatasheetDocument15 pagesDatasheet Search Site - WWW - AlldatasheetPanagiotis PanagosNo ratings yet
- AM5888SDocument10 pagesAM5888ScpfliegerNo ratings yet
- DRV 8811Document22 pagesDRV 8811nelson_loboNo ratings yet
- Mip 2 C 2Document3 pagesMip 2 C 2Shubham AdkeNo ratings yet
- Bd9397efv e PDFDocument30 pagesBd9397efv e PDFshafiuddin7326No ratings yet
- HT7 L4815 V 100Document9 pagesHT7 L4815 V 100Enéas BaroneNo ratings yet
- 74ALVC00 Low Voltage Quad 2-Input NAND Gate With 3.6V Tolerant Inputs and OutputsDocument6 pages74ALVC00 Low Voltage Quad 2-Input NAND Gate With 3.6V Tolerant Inputs and OutputsraphaelraistNo ratings yet
- MITSUBISHI SERVO MOTOR DRIVER IC M51660LDocument5 pagesMITSUBISHI SERVO MOTOR DRIVER IC M51660LSergio SanchezNo ratings yet
- Nmos 128K (16K X 8) Uv Eprom: Figure 1. Logic Diagram DescriptionDocument11 pagesNmos 128K (16K X 8) Uv Eprom: Figure 1. Logic Diagram DescriptionJosepe Franco GerentNo ratings yet
- Features General Description: Advanced Dual PWM and Dual Linear Power ControllerDocument13 pagesFeatures General Description: Advanced Dual PWM and Dual Linear Power ControllerbehzadNo ratings yet
- MB39A132Document60 pagesMB39A132Krum BumbarovNo ratings yet
- OB2269Document12 pagesOB2269Juan Ballon100% (1)
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- Vacon Drive ManualDocument41 pagesVacon Drive ManualAliRouyou100% (1)
- 1/3, 1/4-Duty General-Purpose LCD Display Driver: Cmos IcDocument35 pages1/3, 1/4-Duty General-Purpose LCD Display Driver: Cmos IcOsama YaseenNo ratings yet
- Ka3082 Controlador de Motores CCDocument12 pagesKa3082 Controlador de Motores CCshibatoyanNo ratings yet
- Integrated Circuit Systems, IncDocument11 pagesIntegrated Circuit Systems, Incroger marqNo ratings yet
- 27C512Document12 pages27C512technicalavrNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- Ta 8050 PDocument9 pagesTa 8050 PJuan Alamada Reynoso100% (1)
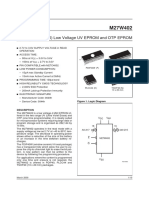
- 512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionDocument15 pages512 Kbit (64Kb x8) UV EPROM and OTP EPROM: DescriptionNduwti NestaNo ratings yet
- MC74HC595A Serial Shift RegisterDocument12 pagesMC74HC595A Serial Shift RegisterWasang Juwi PracihnoNo ratings yet
- Description Power Range: Analog Servo DriveDocument7 pagesDescription Power Range: Analog Servo DriveElectromateNo ratings yet
- TB6560 - T4 - V4 4 Axis CNC Dirver Manual and TB6560-T4-V3 4 Axis CNC Dirver Manual 20110510Document16 pagesTB6560 - T4 - V4 4 Axis CNC Dirver Manual and TB6560-T4-V3 4 Axis CNC Dirver Manual 20110510Ersin CelebiNo ratings yet
- KA7500 DatasheetDocument6 pagesKA7500 DatasheetSergio Daniel BarretoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Circuit Design Volume Three: Design Note CollectionFrom EverandAnalog Circuit Design Volume Three: Design Note CollectionRating: 3 out of 5 stars3/5 (2)
- Poor BoyDocument11 pagesPoor BoyGerardo WarmerdamNo ratings yet
- Dana 24Document7 pagesDana 24Homo Deux100% (1)
- STK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverDocument11 pagesSTK6712BMK4: Unipolar Fixed-Current Chopper-Type 4-Phase Stepping Motor DriverGerardo WarmerdamNo ratings yet
- Bent Wood Shelves Without SteamDocument13 pagesBent Wood Shelves Without SteamRenee Jones100% (7)
- Bluetooth Module GuideDocument13 pagesBluetooth Module GuideJaime Leonardo CruzNo ratings yet
- Steam Bending Qualities of Eight Timber Species of Ghana: January 2011Document15 pagesSteam Bending Qualities of Eight Timber Species of Ghana: January 2011Gerardo WarmerdamNo ratings yet
- Bending Solid Wood To FormDocument39 pagesBending Solid Wood To Formbcooper477No ratings yet
- Apr 12 2020Document2 pagesApr 12 2020Gerardo WarmerdamNo ratings yet
- Bent Wood Shelves Without SteamDocument13 pagesBent Wood Shelves Without SteamRenee Jones100% (7)
- TDA4865AJDocument18 pagesTDA4865AJArmando GonzalezNo ratings yet
- Datasheet l298bDocument14 pagesDatasheet l298bgioganNo ratings yet
- TDA8947JDocument24 pagesTDA8947JrrebollarNo ratings yet
- 4047Document27 pages4047rcarlosrsNo ratings yet
- Octal Buffer/Line Driver with 3-State Outputs DatasheetDocument9 pagesOctal Buffer/Line Driver with 3-State Outputs Datasheetnlb53No ratings yet
- STK4162IIDocument9 pagesSTK4162IIFredy Reinaldo Rivera MartínezNo ratings yet
- STK4162IIDocument9 pagesSTK4162IIFredy Reinaldo Rivera MartínezNo ratings yet
- Introduction To Industrial Automation in PLCDocument50 pagesIntroduction To Industrial Automation in PLCkaushikei22100% (1)
- Encoder PDFDocument6 pagesEncoder PDFCristobal Barrientos GarciaNo ratings yet
- OLED65G6P+WebOS+3 0+UHD+OLED+TV+In-Start+Service+Menu+ScreensDocument8 pagesOLED65G6P+WebOS+3 0+UHD+OLED+TV+In-Start+Service+Menu+ScreensDanielDiasNo ratings yet
- 6-7 - Computing ComponentsDocument40 pages6-7 - Computing ComponentsFenniLimNo ratings yet
- Compiler ConstructionDocument40 pagesCompiler ConstructionNurul DanialNo ratings yet
- Tecnotest Analizador Gases Dignostico Stargas Family898 495 enDocument12 pagesTecnotest Analizador Gases Dignostico Stargas Family898 495 ennewslemNo ratings yet
- Group List and QuestionDocument6 pagesGroup List and QuestionMohd NazmiNo ratings yet
- Rack-Mount Transfer Switches - AP44233Document3 pagesRack-Mount Transfer Switches - AP44233Gamer's SantuyNo ratings yet
- SSU2000 SSU2000e DatasheetDocument9 pagesSSU2000 SSU2000e DatasheetG MonetteNo ratings yet
- Distortion Pedal Design and BuildDocument4 pagesDistortion Pedal Design and BuildManny Silverstein100% (1)
- Reactor de LineaDocument20 pagesReactor de LineaDaniel SanchezNo ratings yet
- Evaluating JFET Transistors for Linear Performance in Active Antenna DesignsDocument9 pagesEvaluating JFET Transistors for Linear Performance in Active Antenna DesignsAlex SanNo ratings yet
- Lecturer, Electrical Engineering, Government Polytechnic, Maharashtra Polytechnic Teachers' Services, Group-ADocument2 pagesLecturer, Electrical Engineering, Government Polytechnic, Maharashtra Polytechnic Teachers' Services, Group-ARhutuja AmbatkarNo ratings yet
- Surface Ship Firefighting: S9086-S3-STM-010Document6 pagesSurface Ship Firefighting: S9086-S3-STM-010Maria Gabriela BusteloNo ratings yet
- Atari VCS 2600 Pitfall Labeled Source Assembler CodeDocument59 pagesAtari VCS 2600 Pitfall Labeled Source Assembler CodeAlainleGuirec100% (1)
- Candy Cdi1012/1 Service ManualDocument28 pagesCandy Cdi1012/1 Service ManualPavel KellerNo ratings yet
- MemoryDocument9 pagesMemoryFazrul RosliNo ratings yet
- Assigment - EleDocument3 pagesAssigment - EleIsuru Thanujaka SubasingheNo ratings yet
- Trango Wireless Backhaul SolutionsDocument55 pagesTrango Wireless Backhaul Solutionsnihadabed77No ratings yet
- HVDC Transmission CalculationsDocument1 pageHVDC Transmission CalculationsJagannathWijekoonNo ratings yet
- How To Measure VoltageDocument5 pagesHow To Measure VoltageSonyAcerNo ratings yet
- Manual Supplement: © 2012-2016 Fluke Corporation. All Rights ReservedDocument4 pagesManual Supplement: © 2012-2016 Fluke Corporation. All Rights Reservedmax_powerNo ratings yet
- The RF Line: Semiconductor Technical DataDocument4 pagesThe RF Line: Semiconductor Technical Datadjsdallas69No ratings yet
- Method Statement For Installation, Testing and Commissioning of UpsDocument4 pagesMethod Statement For Installation, Testing and Commissioning of UpsRaison Mukkath89% (9)
- 6315 Manual - KorDocument163 pages6315 Manual - Kor다원시스No ratings yet
- Manual Skit Deb 1.8 Facelift v2 EngDocument24 pagesManual Skit Deb 1.8 Facelift v2 EngSimonaMauna0% (1)
- Measuring Sunlight at Earth's Surface - Build Your Own PyranometerDocument20 pagesMeasuring Sunlight at Earth's Surface - Build Your Own PyranometerYasser SaafanNo ratings yet
- Introduction To Control Systems Introduction To Control SystemsDocument54 pagesIntroduction To Control Systems Introduction To Control SystemsKhoa PhamNo ratings yet
- BSNL Tta (Je) Communication 200 Expected Questions (Wwwallexamreviewcom) Part TwoDocument20 pagesBSNL Tta (Je) Communication 200 Expected Questions (Wwwallexamreviewcom) Part TwodikeshNo ratings yet
- Samsung P2470HD Service Manual (EN)Document55 pagesSamsung P2470HD Service Manual (EN)Mandu Ceriano67% (3)