You might also like
- NDT Non Distructive TestsDocument18 pagesNDT Non Distructive TestsOmar MamdouhNo ratings yet
- Introduction To Nondestructive TestingDocument15 pagesIntroduction To Nondestructive TestingsenthilkumarNo ratings yet
- Introduction To Nondestructive TestingDocument7 pagesIntroduction To Nondestructive Testingpandab BkNo ratings yet
- What Is Nondestructive TestingDocument5 pagesWhat Is Nondestructive Testingmobile legend practiceNo ratings yet
- NDT Lecture Notes-1Document31 pagesNDT Lecture Notes-1ShiruNo ratings yet
- Iare NDT Lecture NotesDocument103 pagesIare NDT Lecture Notesnagarajan224100% (1)
- NDTDocument23 pagesNDTMohammad AbtaheeNo ratings yet
- NDTDocument18 pagesNDTtxjiangNo ratings yet
- Non Destructive Testing:: How It WorksDocument8 pagesNon Destructive Testing:: How It Worksee1usmanNo ratings yet
- Magnetic Particle TestingDocument3 pagesMagnetic Particle Testingpandab BkNo ratings yet
- Assigment of NDTDocument3 pagesAssigment of NDTHamid AliNo ratings yet
- Non-Destructive Testing (Report)Document16 pagesNon-Destructive Testing (Report)mobile legend practiceNo ratings yet
- Overview of Nondestructive Testing (NDT)Document28 pagesOverview of Nondestructive Testing (NDT)Cepi Sindang KamulanNo ratings yet
- Me6019 Ndt-Notes-Unit-1 1Document29 pagesMe6019 Ndt-Notes-Unit-1 1kamala joseNo ratings yet
- Non-Destructive TestingDocument24 pagesNon-Destructive TestingGopi Krishna NakkalaNo ratings yet
- NDT DataDocument3 pagesNDT Dataduayogesh07No ratings yet
- NDT TextDocument5 pagesNDT TextCanh LeNo ratings yet
- Non-Destructive Testing: Presented by - Sameer 16me100Document17 pagesNon-Destructive Testing: Presented by - Sameer 16me100Kaushik DasNo ratings yet
- Non Destructive Testing: CMR Institute of TechnologyDocument32 pagesNon Destructive Testing: CMR Institute of TechnologyrajNo ratings yet
- Nondestructive Testing: Home - Education Resources - Community College - IntroductionDocument2 pagesNondestructive Testing: Home - Education Resources - Community College - IntroductionRakesh SrivastavaNo ratings yet
- Introduction of NDT UltrasonicDocument8 pagesIntroduction of NDT Ultrasonicfarez77No ratings yet
- NondestructivetestingpptDocument24 pagesNondestructivetestingpptTim NguyenNo ratings yet
- MOM Lab Assignment 1Document13 pagesMOM Lab Assignment 1umairNo ratings yet
- Intro For NDT and NDEDocument3 pagesIntro For NDT and NDEkonainglincho001No ratings yet
- Gi 4 UltrasonicDocument2 pagesGi 4 UltrasonicAnonymous EJR9VpdBLNo ratings yet
- NDTDocument51 pagesNDTMuraliManohar100% (1)
- Double Wall Single Image (DWSI)Document19 pagesDouble Wall Single Image (DWSI)vinod kumarNo ratings yet
- Dimensional Measurements, Material Characterization, and MoreDocument4 pagesDimensional Measurements, Material Characterization, and Moreozlem3472265No ratings yet
- Ndt-Notes-Unit-1 1-9-20Document12 pagesNdt-Notes-Unit-1 1-9-200iamkaran0No ratings yet
- UstDocument22 pagesUstraisNo ratings yet
- Magnetic Particle Examination Art Tec NBDocument8 pagesMagnetic Particle Examination Art Tec NBMarjourie MaloofNo ratings yet
- Introduction to NDT CareersDocument2 pagesIntroduction to NDT Careersأحمد دعبسNo ratings yet
- Magnetic Particle InspectionDocument34 pagesMagnetic Particle InspectionSyed Tanveer100% (2)
- AIRFRAME INSPECTION METHODSDocument6 pagesAIRFRAME INSPECTION METHODSAmiera NorazmiNo ratings yet
- Thesis Report AnantharamanDocument14 pagesThesis Report AnantharamanAnantharaman AjayNo ratings yet
- History: Non-Destructive Testing UltrasonicDocument32 pagesHistory: Non-Destructive Testing UltrasonicAkshay KumarNo ratings yet
- 10 Non Destructive Testing PDFDocument8 pages10 Non Destructive Testing PDFGosaye DesalegnNo ratings yet
- Ultrasonic Case Hardening Depth TestingDocument9 pagesUltrasonic Case Hardening Depth Testingvipuljagrawal0% (1)
- Penetrant Testing (A) Suggest Suitable Method and Justify Why You Choose The MethodDocument6 pagesPenetrant Testing (A) Suggest Suitable Method and Justify Why You Choose The MethodImelda TiongNo ratings yet
- Note CHP 6 Material Science 281 Uitm Em110Document45 pagesNote CHP 6 Material Science 281 Uitm Em110bino_ryeNo ratings yet
- Ultrasonic Testing PrinciplesDocument2 pagesUltrasonic Testing Principlesgundam_freedomNo ratings yet
- NDT IntroDocument2 pagesNDT IntrojomsedNo ratings yet
- Unit 1-Complete Notes With MCQDocument73 pagesUnit 1-Complete Notes With MCQshriman100% (1)
- Non Destructive TestingDocument54 pagesNon Destructive Testingmahi1437100% (1)
- Non Destructive Testing AutosavedDocument26 pagesNon Destructive Testing AutosavedBirondoNo ratings yet
- Magnetic Particle Exam (MT) GuideDocument7 pagesMagnetic Particle Exam (MT) Guidemuthuswamy77No ratings yet
- Guide to common NDT methodsDocument3 pagesGuide to common NDT methodsmabppuNo ratings yet
- Magnetic Particle Inspection - PresentationDocument37 pagesMagnetic Particle Inspection - PresentationzdenmanNo ratings yet
- Visualizing Time-of-Flight Diffraction Using Photoelastic TechniqueDocument9 pagesVisualizing Time-of-Flight Diffraction Using Photoelastic TechniquePieltroNo ratings yet
- Probe Placement For Several Weld ConfigurationDocument66 pagesProbe Placement For Several Weld ConfigurationvcpNo ratings yet
- Introduction To Eddy Current TestingDocument4 pagesIntroduction To Eddy Current TestingyatheendravarmaNo ratings yet
- NDT Students GuideDocument24 pagesNDT Students GuideHussain Ahmed100% (1)
- NDT Methods for Non-Destructive TestingDocument2 pagesNDT Methods for Non-Destructive TestingAekJayNo ratings yet
- Destructive TestDocument3 pagesDestructive TestAshok PradhanNo ratings yet
- Property Evaluation: 4.2.1 Liquid Dye Penetrant TestDocument36 pagesProperty Evaluation: 4.2.1 Liquid Dye Penetrant TestDaniel RomeroNo ratings yet
- Magnetic Particle Testing: Detect Flaws in Ferrous MaterialsDocument54 pagesMagnetic Particle Testing: Detect Flaws in Ferrous MaterialsvcpNo ratings yet
- Solenoid Actuators: Theory and Computational MethodsFrom EverandSolenoid Actuators: Theory and Computational MethodsRating: 3 out of 5 stars3/5 (1)
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Copie de LEM Lifting Equipment Matrix - January - 2020 (00000003)Document2 pagesCopie de LEM Lifting Equipment Matrix - January - 2020 (00000003)aymenmoatazNo ratings yet
- Torque For B7 L7 Stud BoltsDocument2 pagesTorque For B7 L7 Stud BoltsshifaNo ratings yet
- Casingheadspools 200928175135 PDFDocument24 pagesCasingheadspools 200928175135 PDFMohammed SalahNo ratings yet
- API Specification 6A 21st Edition Errata 2 20200625Document4 pagesAPI Specification 6A 21st Edition Errata 2 20200625shifaNo ratings yet
- Quality Manual Revision L Edition 2Document32 pagesQuality Manual Revision L Edition 2shifa100% (1)
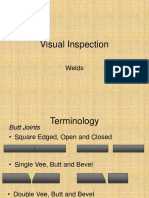
- Visual Inspection WeldDocument53 pagesVisual Inspection Weldshifa100% (1)
- Visual Inspection Checklist PipingDocument2 pagesVisual Inspection Checklist PipingshifaNo ratings yet
- Instrumentation Symbology GuideDocument22 pagesInstrumentation Symbology GuideParvez khanNo ratings yet
- The Principles and Applications of Radiography TestingDocument46 pagesThe Principles and Applications of Radiography TestingRoberts PrideNo ratings yet
- NDT and Weld BasicDocument34 pagesNDT and Weld BasicASMAN SAMALNo ratings yet
- Non-Destructive Testing Inspector S HandbookDocument132 pagesNon-Destructive Testing Inspector S HandbookAdi SutardiNo ratings yet
- API Specification Q1 9th Edition Errata 3 20191017Document1 pageAPI Specification Q1 9th Edition Errata 3 20191017shifaNo ratings yet
- Non-Destructive TestingDocument78 pagesNon-Destructive TestingshifaNo ratings yet
- DS-1 Volume 4 Addendum PDFDocument15 pagesDS-1 Volume 4 Addendum PDFMuhammad Bilal KhattakNo ratings yet
- QMS P 007 Procedure For Magnetic Particle Testing Revision 0Document18 pagesQMS P 007 Procedure For Magnetic Particle Testing Revision 0Mohamed Tarek Hamam100% (3)
- Barry O Donovan Novartis (Compatibility Mode)Document13 pagesBarry O Donovan Novartis (Compatibility Mode)Rama KrishnaNo ratings yet
- QA Manual Rev6Document44 pagesQA Manual Rev6shifa100% (1)
- The Steel Pipe Buyer'S GuideDocument8 pagesThe Steel Pipe Buyer'S Guideramnadh803181No ratings yet
- Quality AspectsDocument50 pagesQuality AspectsshifaNo ratings yet
- API Internal Audit ProgrammeDocument72 pagesAPI Internal Audit Programmeshifa100% (1)
- MoC Procedure PDFDocument14 pagesMoC Procedure PDFjanuary1969100% (2)
- MT Procedure For MAG50Document17 pagesMT Procedure For MAG50Anonymous gFcnQ4go100% (1)
- LIQUID PENETRANT SOLVENT REMOVABLE INSPECTIONDocument4 pagesLIQUID PENETRANT SOLVENT REMOVABLE INSPECTIONJoshnewfound50% (4)
- MT Report FormDocument1 pageMT Report FormAmit HasanNo ratings yet
- PPE Inventory ListDocument1 pagePPE Inventory ListshifaNo ratings yet
- Quality For The Oil Gas Industry - HagenDocument19 pagesQuality For The Oil Gas Industry - HagenArjun VinayakumarNo ratings yet
- TS 0070Document1 pageTS 0070shifaNo ratings yet
- Calibrate Vernier Calipers ProcedureDocument2 pagesCalibrate Vernier Calipers Proceduregiamillia100% (2)
- 2-3-2 - Chip EngDocument15 pages2-3-2 - Chip Engpalmech07No ratings yet
- API MonoDocument1 pageAPI MonoshifaNo ratings yet
- Elements of Electrical Engineering: Guest Lecture OnDocument15 pagesElements of Electrical Engineering: Guest Lecture Onanon_288859685No ratings yet
- MITOCHONDRIA AS A BIOLOGICAL CELL CAPACITORDocument150 pagesMITOCHONDRIA AS A BIOLOGICAL CELL CAPACITORBhargavNo ratings yet
- Applications of DC GeneratorsDocument11 pagesApplications of DC GeneratorsTarunNo ratings yet
- Referat BuzoDocument11 pagesReferat BuzoAnaNo ratings yet
- Transformer Isolation - Technical Articles PDFDocument8 pagesTransformer Isolation - Technical Articles PDFMohammadNo ratings yet
- XMT 425 - 350Document94 pagesXMT 425 - 350Jorge Carrion0% (1)
- Palani-Ram 12th Physics Important Questions-2023Document6 pagesPalani-Ram 12th Physics Important Questions-2023seetharaman8341No ratings yet
- PHYC-2122 electromagnetic induction conceptsDocument6 pagesPHYC-2122 electromagnetic induction conceptsJuan InasarNo ratings yet
- TransformerDocument9 pagesTransformerSamPolancosNo ratings yet
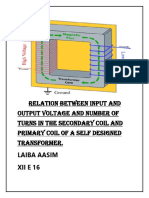
- Relation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerDocument22 pagesRelation Between Input and Output Voltage and Number of Turns in The Secondary Coil and Primary Coil of A Self Designed TransformerBharati patil67% (18)
- Mmpapmg 88Document32 pagesMmpapmg 88Pier Paolo LilliuNo ratings yet
- Project Report on Electromagnetic InductionDocument8 pagesProject Report on Electromagnetic Inductionthe best ofNo ratings yet
- Linear Induction Motor ExplainedDocument3 pagesLinear Induction Motor ExplainedMakkal ThalaivanNo ratings yet
- Measurement and InstrumentationDocument4 pagesMeasurement and InstrumentationAbirami RajendranNo ratings yet
- E. WORKSHOP II by SemereDocument93 pagesE. WORKSHOP II by SemereSami Ye KiyaNo ratings yet
- YCT Moving Charges & Magnetism NEET JEE Practice QuestionsDocument189 pagesYCT Moving Charges & Magnetism NEET JEE Practice Questionstechnicalfacts31No ratings yet
- Physics MCQDocument22 pagesPhysics MCQMubyNo ratings yet
- Utilization of Electric Power: Heating and WeldingDocument29 pagesUtilization of Electric Power: Heating and WeldingNokhwrang BrahmaNo ratings yet
- Aru 302Document34 pagesAru 302Michael PachecoNo ratings yet
- Em 2Document89 pagesEm 2Wallace JnrNo ratings yet
- Chapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneDocument46 pagesChapter 5 - Synchronous Generator: The Effect of Load Changes On A Synchronous Generator Operating AloneMuhammad R ShihadehNo ratings yet
- Electromechanical Systems CH 5Document46 pagesElectromechanical Systems CH 5fabrice mellantNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- Induction MotorDocument27 pagesInduction MotorHermione Calliope ChanNo ratings yet
- Induction Heating Process ExplainedDocument12 pagesInduction Heating Process Explainedtastaman123100% (1)
- Federal Board Part 2 Smart Syllabus Class 12Document64 pagesFederal Board Part 2 Smart Syllabus Class 12Nida ParveenNo ratings yet
- Electrodynamometer-Type Wattmeter: 1. Fixed Coil SystemDocument21 pagesElectrodynamometer-Type Wattmeter: 1. Fixed Coil SystemJebas ManovaNo ratings yet
- Anshul BhelDocument96 pagesAnshul BhelMessieurs Avinash PurohitNo ratings yet
- E-Books Electrical Machines by Mr. S. K. Sahdev-27-103Document77 pagesE-Books Electrical Machines by Mr. S. K. Sahdev-27-103Atina StyaNo ratings yet
- Physics Paper 2 Sf026/2 PSPM Semester 2 Session 2016/2017Document13 pagesPhysics Paper 2 Sf026/2 PSPM Semester 2 Session 2016/2017Voon Chen WeiNo ratings yet