Professional Documents
Culture Documents
Introducción
Uploaded by
DavidLemureCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Introducción
Uploaded by
DavidLemureCopyright:
Available Formats
CAPTUIO
lntroduccin
En este captulo se comienza introduciendo la nocin de robtica y tratando sus antecedentes. En el siguiente apartado se presenta un esquema general del sistema robot
considerando tambin la interaccin con su entorno. A continuacin se tratan aspectos
especficos de los robots manipuladores y de los mviles. Por ltimo se introducen
conceptos relacionados con la autonoma de un robot distinguiendo entre robots teleoperados, robots de funcionamiento repetitivo y robots autnomos o inteligentes.
1.1 ROBTICA
En el trmino robot confluyen las imgenes de mquinas para la realizacin de trabajos productivos y de imitacin de movimientos y comportamientos de seres vivos.
Los robots actuales son obras de ingenieray como tales concebidas para producir
bienes y servicios o explotar recursos naturales. Desde esta perspectiva son mquinas
con las que se contina una actividad que parte de los propios orgenes de la humanidad, y que desde el comienzo de la Edad Moderna se fundamenta esencialmente
en conocimientos cientficos.
En nuestro siglo el desarrollo de mquinas ha estado fuertemente influido por el
progreso tecnolgico. De esta forma se pasa de mquinas que tienen como objetivo
exclusivo la amplificacin de la potencia muscular del hombre, sustituyndolo en su
trabajo fsico, a mquinas o instrumentos que son tambin capaces de procesar informacin, complementando, o incluso sustituyendo, al hombre en algunas actividades
intelectuales.
Por otra parte, tambin desde la antigedad, el hombre ha sentido fascinacin por
las mquinas que imitan la figura y los movimientos de seres animados. Existe una
larga tradicin de autmatas desde el mundo griego hasta nuestro siglo, pasando por
los autmatas de los artesanos franceses y suizos del siglo xv[I, que ya incorporaban
interesantes dispositivos mecnicos para el control automtico de movimientos.
HOBOTICA. Manipuladr{! y rohats mviles
Robtica
El trmino robot aparece por primenayez en 1921, en la obra teatral R.U.R. (Rossum's Universal Robots) del novelista y autor dramtico checo Karel Capek en cuyo
idioma la palabra "robota" significa faerza del trabajo o servidumbre. Por aquellos
aos la produccin en grandes series se haba introducido en numerosas fbricas. Se
y la dominacin de los hombres por las
y
mquinas, argumento de sta otras obras teatrales y pelculas de los aos veinte en
discute ya del poder de las mquinas
los que aparecen trabajadores robticos.
El trmino tiene amplia aceptacin y pronto se aplica a autmatas construidos en
los aos veinte y treinta que se exhiben en ferias, promociones de productos, pelculas
y otras aplicaciones ms o menos festivas. Se trata de imitar movimientos de seres vivos pero tambin de demostrar tcnicas de control remoto, incluyndose en algunos
casos funciones sensoriales primarias.
En cualquier caso, interesa recordar que el trmino robot nace asociado a la idea
de trabajo y produccin. En 1915, Leonardo Torres Quevedo declar a la revista "Scientific American" (Eames, 1973):
"Los antiguos autmatas imitaban la apariencia y movimientos de los seres vivos,
lo cual no tiene mucho inters prctico; lo que yo busco es una clase de aparatos que,
sin necesidad de reproducir los gestos ms visibles del hombre, intentan obtener los
mismos resultados que una persona".
Los robots industriales surgen de la convergencia de tecnologas del control automtico y, en particular, del control de mquinas herramientas, de los manipuladores
teleoperados, y de la aplicacin de computadores en tiempo real. En los prrafos siguientes se comentan brevemente algunos aspectos significativos en la evolucin de
estas tecnologas.
Mediante el control automtico de procesos se pretende concebir y realizar ingenios que permitan gobernar un proceso sin la intervencin de agentes exteriores, especialmente el hombre. En particular, se presentan problemas de seguimiento automtico de seales de consigna, mediante los denominados servosistemas. Estos sistemas
generan automticamente seales de control que tratan de anular la diferencia entre la
seal de consigna y la seal medida en el proceso u objeto que se pretende controlar.
Un problema similar es el de la regulacin automtica mediante la cual se trata de
mantener una consigna, aunque se presenten perturbaciones que tiendan a separar al
sistema de las condiciones deseadas.
Tanto los servosistemas como los reguladores se basan en el principio de la realimentacin. Las seales de consigna o referencia se comparan con medidas de variables del proceso u objeto que se pretende controlar y su diferencia se emplea para generar acciones de control sobre el propio proceso u objeto. En los sistemas de control
automtico esta cadena cerrada de accin-medida-accin se realiza sin intervencin
del hombre.
La automatizacin industrial con utilizacin de sistemas de control automtico
comienza tambin en el siglo xIX pero no es hasta el siglo xx y, muy especialmente,
despus de la Segunda Guerra mundial, cuando empieza a extenderse de forma importante en todos los sectores industriales. De esta forma, se generalizan los sistemas
de control automtico de variables de procesos industriales y, en particular, sistemas de
control de posicin y velocidad. Se emplean tambin sistemas de control realimentado
en barcos o aviones que deben seguir automticamente una determinada trayectoria
(pilotos automticos) o en el posicionamiento de radares.
INTRODUCCION
Esquema general del sistema robot
Tradicionalmente, en la realizacin de sistemas de control automtico se han empleado diversas tecnologas tales como la neumtica, hidrulica y, posteriormente, la
elctrica. A finales de los aos sesenta y comienzos de los setenta los minicomputadores encuentran una importante acogida en aplicaciones de control. La aparicin en
1972 del microprocesador suministra un impulso decisivo al control por computador,
haciendo rentables numerossimas aplicaciones entre las que se cuenta el control de
robots. Los avances en microelectrnica de los aos ochenta, con la tecnologa de los
circuitos de gran escala de integracin, acentan esta tendencia.
Con respecto a las mquinas herramientas de control numrico, hay que sealar
los proyectos que se desarrollaron en EE.UU. a finales de los aos cuarenta y principios de los cincuenta. Se combinaban los progresos en el diseo de servosistemas con
las recientes experiencias en tcnicas de computacin digital. De esta forma, el contorno de corte era codificado en cinta de papel perforado, utilizndose para generar
automticamente las rdenes a los servomecanismos de la mquina. En 1953 se presentaba en el "Massachusetts Institute of Technology" (MIT) una mquina de estas
caractersticas.
Los teleoperadores se desarrollaron en los aos cuarenta para manejar materiales
radioactivos. Consistan en un par de pinzas "maestra" y "esclava" acopladas por
mecanismos que permitan que la pinza "esclava", en contacto con el material peligroso, reprodujera los movimientos de lapinza "maestra" accionada por un operador
detrs de un muro protector con ventanas apropiadas para observar la operacin (Goertz,1963).
El primer teleoperador accionado por servomecanismos elctricos se present en
1947. Poco despus, en 1948, se introdujeron servosistemas con realimentacin de
fuerza hacia lapinza "maestra" para permitir que el operador percibiera el esfuerzo
desarrollado.
En 1954 el ingeniero americano George Devol patent el que se considera el primer robot industrial: un dispositivo que combinaba la articulacin de un teleoperador
con el eje servocontrolado de una mquina de control numrico.
En el prximo apartado se presenta una primera aproximacin a los robots actuales
y su interaccin con el entorno. En los dos siguientes se tratan aspectos especficos de
los robots manipuladores y los vehculos robticos. Posteriormente, se presenta una
clasificacin de sistemas robticos teniendo en cuenta su autonoma.
1.2
ESQUEMA CENERAL DEt SISTEMA ROBOT
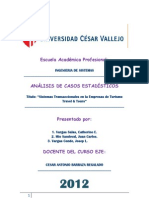
En la figura 1.1 se muestra el esquema bsico de un robot (Silva, 1984). En ella se
identifican un sistema mecnico, actuadores, sensores y el sistema de control como
elemento bsico necesario para cerrar la cadena actuacin-medidas-actuacin. En los
prrafos siguientes se consideran estos componentes dedicando una atencin especial
al sistema de control. En los apartados que siguen se tratan problemas ms especficos
de robots manipuladores o robots mviles. En Ollero (1991) puede encontrarse una
descripcin ms detallada.
En el sistema mecnico puede distinguirse entre el rgano terminal, el brazo articulado, y un vehculo. En la mayor parte de los robots industriales no existe tal vehculo, estando fija la base del brazo.
INTRODUCCIN
Esquema general del sistema robot
Figura
l.l: Robot y su interaccin con el entorno.
Desde el punto de vista del procesamiento de la informacin, en robtica se involucran funciones de control de movimientos, percepcin y planificacin.
En un sentido amplio, el sistema de control involucra tanto bucles de realimentacin de la informacin suministrada por los sensores internos, como del entorno.
Los sensores internos miden el estado de la estructura mecnica y, en particular, giros o desplazamientos relativos entre articulaciones, velocidades, fuerzas y pares. Estos sensores permiten cerrar bucles de control de las articulaciones de la estructura
mecnica.
Los sensores externos permiten dotar de sentidos al robot. La informacin que suministran es utilizada por el sistema de percepcin para aprehender la realidad del entorno. Los sistemas de percepcin sensorial hacen posible que un robot pueda adaptar
automticamente su comportamiento en funcin de las variaciones que se producen en
su entorno, haciendo frente a situaciones imprevistas. Para ello el sistema de control
del robot incorpora bucles de realimentacin sensorial del entorno, generando automticamente acciones en funcin de la comparacin de dicha informacin sensorial con
patrones de referencia.
El desarrollo de sistemas de percepcin en Robtica surge a partir de los progresos
tecnolgicos en sensores tales como los de visin, tacto e, incluso, audicin. Sin embargo, la percepcin involucra no slo la captacin de la informacin sensorial, sino
tambin su tratamiento e interpretacin. Por tanto, es necesario realzar una abstraccin a partir de un cierto conocimiento previo del entorno. Es claro que la complejidad
de la percepcin artificial depende de lo estructurado que est dicho entorno.
Por ltimo, la planificacin tiene como objetivo encontrar una trayectoria desde
una posicin inicial a una posicin objetivo, sin colisiones, y minimizando un determinado ndice. En el caso ms simple, el problema se plantea en un entorno que se supone conocido (existe un mapa previo) y esttico. Se supone adems que el robot es omnidireccional, que se mueve suficientemente lento y que es capaz de seguir el camino
de forma perfecta.
INTRI.JCCION
Robots manipuladores
1.3 ROBOTS MANIPULADORES
La mayor parte de los robots industriales actuales son esencialmente brazos articulados. De hecho, segn la definicin del "Robot Institute of America", un robot industrial es un manipulador programable multifuncional diseado para mover materiales,
piezas, herramientas o dispositivos especiales, mediante movimientos variados, programados para la ejecucin de distintas tareas.
En la robtica subyace la idea de sustituir equipos capaces de automatizar operaciones concretas por mquinas de uso ms general que puedanrealizar distintas tareas.
El concepto "programable" es tambin bsico. Como se mencionaba en la seccin anterior, larealizacin por programa de las funciones de control ofrece mucha mayor flexibilidad, y la posibilidad de implantar funciones complejas necesarias para controlar
el manipulador.
1.3.1 Sistema mecnico
El sistema mecnico est compuesto por diversas articulaciones. Normalmente se
distingue entre elbrazo y el rgano terminal o efector final que puede ser intercambiable, empleando pinzas o dispositivos especficos para distintas tareas.
El aumento del nmero de articulaciones aporta mayor maniobrabilidad pero dificulta el problema del control, obtenindose nonnalmente menores precisiones por
acumulacin de effores. Muchos robots industriales actuales tienen menos de los seis
grados de libertad de rotacin o traslacin que se requieren en general para posicionar
y orientar en el espacio el rgano terminal. Sin embargo, tambin se desarrollan manipuladores altamente redundantes con mltiples articulaciones para aplicaciones en
reas de trabajo de difcil acceso. Entre estos cabe destacar los robots tipo serpiente.
Asimismo, se investiga en robots flexibles que permitan un largo alcance con un peso
reducido.
En este punto conviene indicar que las ecuaciones que describen el movimiento del
brazo articulado son ecuaciones diferenciales no lineales y acopladas, para las que, en
un caso general, resulta difcil obtener soluciones analticas. Fsicamente, los trminos
de acoplamiento representan: pares gravitacionales que dependen de la posicin de las
articulaciones, pares de reaccin debidos a las aceleraciones de otras articulaciones, y
pares debidos a la aceleracin de Coriolis y fuerzas centrfugas. La magnitud de estas
interacciones depende de las caractersticas del brazo y de la carga.
1.3.2 Actuadores
Los actuadores generan las fuerzas o pares necesarios para animar la estructura
mecnica. Se utilizan tecnologas hidrulicas, para desarrollar potencias importantes,
y neumticas, pero en la actualidad se ha extendido el empleo de motores elctricos, y
en particular motores de corriente continua servocontrolados, emplendose en algunos
casos motores paso a paso y otros actuadores electromecnicos sin escobillas. Existen
tambin robots industriales de accionamiento directo que permiten eliminar los problemas mecnicos inherentes al empleo de engranajes y otras transmisiones. Se invesINTRODUCCId}N
Robots manipuladores
tiga en nuevos actuadores que disminuyan la inercia, suministren un par elevado, aumenten la precisin, originen menos ruido magntico y sean de bajos peso y consumo
(Rosheim, 1989).
Por otra parte, se trata de buscar otras opciones al sistema convencional de accionamiento de articulaciones, emplendose para ello conceptos biomecnicos. De esta
forma, se investiga en manipuladores con actuadores tipo msculo tanto para el brazo
como para la mano del robot (Nakano y otros, 1984; Akazawa y Fujii, 1986; Caldwell
y Taylor, 1988; Galhano y otros, 1991).
1.3.3 Sensores y sstemas de contro
Los sistemas de control de robots pueden considerarse funcionalmente descompuestos segn una estructura jerrquica. En el nivel inferior se realizan las tareas de
servocontrol y supervisin de las articulaciones. La mayor parte de los robots industriales actuales emplean servomecanismos convencionales con realimentaciones de
posicin y velocidad para generar seales de control sobre los actuadores de las articulaciones. Tpicamente, los parmetros del controlador son fijos aunque varen significativamente las condiciones de trabajo con la carga o con el propio movimiento.
Ntese que las cargas inerciales, acoplamientos entre articulaciones, y efectos de gravedad son todos dependientes de la posicin. El problema se ampla al aumentar la velocidad. Como resultado, en la mayor parte de los robots industriales actuales, la velocidad de operacin debe ser pequea.
Para mejorar las prestaciones se investiga en tcnicas para identificar modelos suficientemente fiables de la dinmica del robot y en mtodos de control de articulaciones que permitan compensar las no linealidades y acoplamientos, y optimizar el comportamiento dinmico (An, Atkenson y Hollerback, 1988). Asimismo, se trabaja en
nuevos mtodos de control adaptativo, que permitan tener en cuenta los cambios en las
condiciones de trabajo (Craig, 1988; Ortega y Spong, 1989), y en mtodos de control
con aprendizaje para mejorar progresivamente la respuesta en operaciones repetitivas,
tpicas en robots industriales.
El segundo nivel de control se ocupa de la generacin de trayectorias, entendiendo
por tal la evolucin del rgano terminal cuando se desplaza de una posicin a otra. El
generador de trayectorias debe suministrar a los servomecanismos las referencias
apropiadas para conseguir la evolucin deseada del rgano terminal a partir de la especificacin del movimiento deseado en el espacio de la tarea. Para obtener las referencias que corresponden a las articulaciones en un determinado punto del espacio de trabajo, es necesario resolver el modelo geomtrico inverso que es no lineal.
Los niveles superiores se ocupan de la comunicacin con el usuario, interpretacin
de los programas, percepcin sensorial y planificacin.
Los primeros robots industriales eran programados exclusivamente por guiado manual, almacenando la secuencia de posiciones en memoria digital. La interaccin con
latarea se limitaba ala apertura o cierre de una pinza u otro rgano terminal, indicndolo a un equipo externo, o esperando una seal de sincronizacin. Las aplicaciones
tpicas eran de "pick and place", tales como la carga y descarga de mquinas, realizando tareas con movimientos absolutamente definidos y fijos. Es decir, se primaba la repetibilidad sobre la adaptacin. En cualquier caso, los robots podan ser reprogramados para larealizacin de otras tareas.
INTRODUCCION
Robots manipuladores
En la robtica industrial se han integrado los progresos en el control por computador de telemanipuladores, simultneos al desarrollo de los primeros robots. Entre
stos cabe destacar los trabajos de Shannon y Minsky que, en 1958, propusieron un
dispositivo, al que denominaron "sensor-controlled robot", eue consista en un teleoperador equipado con distintos sensores conectados a un computador que le suministraba informacin suficiente para decidir las acciones necesarias en orden a alcanzar un determinado objetivo. Aunque el dispositivo no lleg a realizarse, motiv a
otros investigadores tales como Ernst (1961) que, en su tesis doctoral en el MIT, construy un robot con sensores de tacto en la mano, que poda ser programado para realizar tareas tales como la localizacin, agarre, transporte y descarga de pequeas piezas
en cajas. Este robot, que puede ser considerado como el primero controlado mediante
sensores externos, se programaba mediante instrucciones parecidas a las de un lenguade
je ensamblador, incorporando rdenes relativas a la informacin de los sensores
tacto.
Continuando con el empleo de sensores de percepcin del entorno, puede mencionarse el importante trabajo de Roberts (1963), demostrando la posibilidad de procesar
una imagen digitalizada para obtener una descripcin matemtica de los objetos incluidos en la escena, expresando su posicin y orientacin mediante transformaciones
homogneas.
Wichman (1967) present en Stanford un equipo con cmara de televisin conectada a un computador que poda, en tiempo real, identificar objetos y sus posiciones.
Ntese que interesa que el programador pueda expresar los movimientos en coordenadas cartesianas y no en los ngulos o desplazamientos de las articulaciones. Pie-
per (1968) obtuvo una solucin al problema aplicando resultados tericos de la Cinemtica. De esta forma fue posible facilitar la programacin del robot utilizando
llamadas a subrutinas que realizanlas transformaciones geomtricas correspondientes.
En general, la utilizacin de coordenadas cartesianas fue un importante paso que abri
el camino al empleo de modelos del universo para la toma de decisiones, planificacin
y verificacin de tareas.
Desde el comienzo de los aos setenta, se investiga en robots con sensores de visin, resolviendo en tiempo real problemas bsicos de manipulacin con visin en color (Feldman,l97l) y ensamblado de estructuras de bloques (Eijiri y otros, 1972).
Se progresa tambin en mtodos de clculo de trayectorias con generacin de consignas a los servos de las articulaciones y en lenguajes de programacin de mayor nivel que incorporan primitivas relacionadas con sensores de percepcin del entorno y
especificacin de movimientos en coordenadas cartesianas.
Al final de los aos setenta y comienzo de los ochenta se adoptan lenguajes estructurados (Paul, 1981) con herramientas de programacin en tiempo real que progresivamente se introducen en los robots industriales comerciales.
Asimismo, se trabaja en lenguajes de programacin orientados alatarea basados
en la incorporacin de mtodos de la Inteligencia Artificial para generacin automtica de planes, permitiendo tambin coordinar la actividad de un robot en sistemas de
fabricacin flexible.
Por lo que respecta a la planificacin de caminos libres de obstculos, el mtodo
tpico se basa en construir una estructura de datos que represente la geometra del espacio de trabajo o las restricciones existentes y, a continuacin, se utiliza la estructura
para encontrar el camino (Lozano-Prezy Wesley, 1979; Lozano-Prez 1983; Brooks,
INTRODI.JCCIN
Robots mviles
1983). No obstante, estos mtodos son, en general, costosos desde el punto de vista
computacional, lo que suele impedir su aplicacin en tiempo real. Existen tambin
mtodos que incorporan la planificacin de caminos en el control de bajo nivel utilizando para ello mtodos tales como el de los campos potenciales (Khatib, 1986).
En la pasada dcada, surge tambin el concepto de realimentacin visual en control
de manipuladores, con aplicaciones al agarre de objetos en movimiento (Weiss y
otros, 1987; Feddema y Mitchell, 1989). En IEEE (1998) pueden encontrarse diversas
aplicaciones de realimentacin visual.
Por otra parte, desde los aos ochenta se progresa en la manipulacin diestra de objetos mediante una mejor comprensin de la mecnica de la manipulacin y su planificacin (Mason y Salisbury, 1985; Sturges, 1990).
Para acabar este apartado conviene poner de manifiesto las importantes demandas
en teora de control, sistemas de percepcin y aprendizaje, sistemas informticos en
tiempo real, y nuevos mecanismos, que se requieren para resolver los problemas planteados por el control de estructuras articuladas y la manipulacin de objetos.
Se han aplicado tambin tcnicas de control tales como las basadas en redes neuronales (Kawato y Uno, 1988; Goldberg y Pearlmutter, 1988; Miller y otros, 1990), y
otras estructuras de control inteligente, que estn permitiendo resolver problemas que
son de elevada complejidad con mtodos tradicionales. En general, junto a los progresos tecnolgicos, se requieren desarrollos tericos que permitan formular una metodologa de diseo de estos nuevos sistemas de control, en los que se involucran bucles
de realimentacin sensorial y procesos de decisin y aprendizaje, que son difciles de
tratar con los mtodos convencionales de la teora de control.
1.4
ROBOTS MVLES
El desarrollo de robots mviles responde a la necesidad de extender el campo de
aplicacin de la Robtica, restringido inicialmente al alcance de una estructura mecnica anclada en uno de sus extremos. Se trata tambin de incrementar la autonoma limitando todo lo posible la intervencin humana.
Desde el punto de vista de la autonoma, los robots mviles tienen como precedentes los dispositivos electromecnicos, tales como los denominados "micro-mouse",
creados desde los aos treinta para desarrollar funciones inteligentes tales como descubrir caminos en laberintos. Cabe destacar la tortuga de Walter, presentada en 1948,
que poda reaccionar ante la presencia de obstculos, subir pendientes y, cuando la alimentacin comenzaba a ser insuficiente, dirigirse hacia una posicin de recarga.
Estos trabajos de investigacin no guardan una relacin directa con los vehculos
autnomos que comenzaron a aplicarse desde los aos sesenta en la industria, siendo
guiados por cables bajo el suelo o mediante sensores pticos para seguir lneas trazadas en la planta. Estas aplicaciones, hoy da comunes en muchos procesos de fabricacin, se caracterizan por un entorno fuertemente estructurado para facilitar la automa-
tizacin.
En los aos setenta se vuelve a trabajar en el desarrollo de robots mviles dotados
de una mayor autonoma.Lamayor parte de las experiencias se desarrollan empleando
plataformas que soportan sistemas de visin (Moravec, 1981). Sin embargo, el desaINTRODUCCION
Robots mviles
rrollo tecnolgico todava no era el suficiente para lograr la navegacin autnoma de
forma eficiente. En los aos ochenta el incremento espectacular de la capacidad computacional y el desarrollo de nuevos sensores, mecanismos y sistemas de control, permite aumentar la autonoma. En esta dcada cabe mencionar los desarrollos de robots
mviles, tanto para interiores como para navegacin exterior (Bares y otros, 1988;
Thorpe, 1990), realizados en la Carnegie Mellon University (Pittsburgh, EE.UU.).
Se trata de que el robot tenga la suficiente inteligencia como para reaccionar y tomar decisiones basindose en observaciones de su entorno, sin suponer que este entorno es perfectamente conocido.
La autonoma de un robot mvil se basa en el sistema de navegacin automtica.
En estos sistemas se incluyen tareas de planificacin, percepcin y control.
En los robots mviles, el problema de la planificacin, en el caso ms general, puede descomponerse en planificacin global de la misin, de la ruta, de la trayectoria y,
finalmente, evitar obstculos no esperados.
En un robot para interiores, la misin podra consistir en determinar a qu habitacin hay que desplazarse, mientras que la ruta establecera el camino desde la posicin
inicial a una posicin en la habitacin, definiendo puntos intermedios de paso. El vehculo puede desviarse de la ruta debido a la acumulacin de imprecisiones mecnicas
y de control.
Existen numerosos mtodos de planificacin de caminos para robots mviles que
se basan en hiptesis simplificadoras similares a las mencionadas en el apartado 1.3:
entorno conocido y esttico, robots omnidireccionales, con movimiento lento y ejecucin perfecta de trayectoria. En particular, hay muchos mtodos que buscan caminos
libres de obstculos que minimizan la distancia recorrida en un entorno modelado mediante polgonos. En otros casos, se modela el espacio libre tratando de encontrar caminos por el centro del mismo. Para facilitar la bsqueda existen tcnicas de descomposicin del espacio en celdas (Thorpe, 1984), utilizacin de restricciones de varios
niveles de resolucin y bsqueda jerarquizada (Kambhampati y Davis, 1986; Stenz,
1990) que petmiten hacer ms eficiente el proceso con vistas a su aplicacin en tiempo
real.
La planificacin de la trayectoria puede realizarse tambin de forma dinmica,
considerando la posicin actual del vehculo y los puntos intermedios de paso definidos en la planificacin de la ruta. La trayectoria se corrige debido a acontecimientos
no considerados. La definicin de la trayectoria debe tener en cuenta las caractersticas
cinemticas del vehculo. Por ejemplo, en vehculos con ruedas y traccin convencional, interesa definir trayectorias de curvatura continua que puedan ejecutarse con el
menor error posible (Kanayama y Hartman, 1989; Nelson, 1989).
Adems de las caractersticas geomtricas y cinemticas, puede ser necesario tener
en cuenta modelos dinmicos de comportamiento del vehculo contemplando la interaccin vehculo-terreno. Por otra parte, puede plantearse tambin el problema de la
planificacin de la velocidad teniendo en cuenta las caractersticas del terreno y del
camino que se pretende seguir.
Una vez realizada la planificacin de la trayectoria, es necesario planificar movimientos concretos y controlar dichos movimientos para mantener al vehculo en la
trayectoria planificada. De esta forma, se plantea el problema del seguimiento de caminos, que para vehculos con ruedas se concreta en determinar el ngulo de direccin
teniendo en cuenta la posicin y orientacin actual del vehculo con respecto alatraINTODUCCIN
Robots mviles
yectoria que debe seguir. Asimismo, es necesario resolver el problema del control y
regulacin de la velocidad del vehculo.
Conviene mencionar tambin los mtodos que permiten la integracin de la planificacin con el control del vehculo. Entre stos cabe mencionar el de los campos potenciales (Khatib, 1986; Borenstein y Koren, 1989). La idea consiste en determinar la
resultante de fuerzas que atraen el robot hacia el objetivo y que lo repelen de los obstculos.
En cualquier caso, el problema del control automtico preciso de un vehculo con
ruedas puede resultar ms complejo que el de los manipuladores debido a la presencia
de restricciones no holnomas. Los bucles de control se plantean tanto en el espacio de
las variables articulares como en coordenadas del mundo, y las ecuaciones de movimiento son complejas, si se considera la interaccin con el terreno. Mientras en manipuladores es relativamente fcil el clculo y medida de los pares y fuerzas que se ejercen sobre la estructura mecnica, la determinacin de estos pares en vehculos con
ruedas es muy difcil. En la actualidad se emplean fundamentalmente mtodos geomtricos y modelos cinemticos simplificados. No obstante,la consideracin de aspectos
dinmicos es necesaria cuando la velocidad es alta.
Ntese tambin que el control del vehculo requiere disponer de medidas de su posicin y orientacin, a intervalos suficientemente cortos. La tcnica ms simple consiste en lautllizacin de la odometraapartr de las medidas suministradas por los sensores situados en los ejes de movimiento, tpicamente codificadores pticos. Sin
embargo, la acumulacin de error puede ser muy grande. Se emplean tambin sistemas de navegacin inercial incluyendo girscopos y acelermetros, aunque estos sistemas tambin acumulan effor, especialmente erlla determinacin de la posicin empleando los acelermetros. No obstante, la combinacin de las tcnicas odomtricas
con la medida de los ngulos de orientacin puede dar buenos resultados en intervalos
de tiempo y distancia viajada suficientemente pequeos.
La correccin de la inevitable acumulacin de error hace necesario el empleo de
otros sensores. Con este fin, en aplicaciones de exteriores, en las que las distancias que
recorre el vehculo autnomo son considerables, se emplean sistemas de posicionamiento global mediante satlites. Asimismo, la incertidumbre de la posicin se reduce
a intervalos suficientemente grandes empleando el sistema de percepcin (Salichs y
otros, 1999). En particular, suelen emplearse marcas especiales cuya deteccin permite estimar con precisin la posicin del robot (Cao y otros, 1986). En entornos no esffucturados, con ausencia de marcas especiales, la estimacin de la posicin mediante
el sistema de percepcin es notablemente ms compleja (Asensio y otros, 1999).
El sistema de percepcin de un robot mvil o vehculo autnomo tiene un triple objetivo: permitir una navegacin segura, detectando y localizando obstculos y situaciones peligrosas en general, modelar el entorno construyendo un mapa o representacin de dicho entorno (fundamentalmente geomtrica), y estimar la posicin del
vehculo de forma precisa. Asimismo, el sistema de percepcin de estos robots puede
aplicarse no slo para navegar sino tambin para aplicaciones tales como el control de
un manipulador situado en el robot.
Para el diseo de estos sistemas de percepcin deben tenerse en cuenta diferentes
criterios, algunos de los cuales son conflictivos entre s. De esta forma, es necesario
considerar la velocidad del robot, la precisin, el alcance, la posibilidad de interpretacin errnea de datos y la propia estructura de la representacin del entorno.
10
INTRODUCCION
Robots autnomos y telerrobtica
En muchas aplicaciones se requiere tener en cuenta diversas condiciones de navegacin con requerimientos de percepcin diferentes. De esta forma, puede ser necesario estimar de forma muy precisa, aunque relativamente lenta, la posicin del robot y,
alavez, detectar obsticulos lo suficientemente rpido, aunque no se necesite una gran
precisin en su localizacin.
Existen tambin arquitecturas en las que el sistema de percepcin se encuentra integrado en el controlador de forma que, en entornos estructurados, es posible estimar
de forma muy rpida la posicin para navegar a alta velocidad (Dickman y Zapp,
1987). Asimismo, se han aplicado redes neuronales (Pomerleau, 1990) para generar el
ngulo de direccin a partir del sistema de percepcin.
Conviene mencionar tambin el inters del empleo de tcnicas de procesamiento
en paralelo para el tratamiento de imgenes en el guiado autnomo de vehculos (Ferrvz y Ollero, 2000).
Con respecto a los sensores especficos, adems de las caractersticas de precisin,
rango, e inmunidad a la variacin de condiciones del entorno, es necesario tener en
cuenta su robustez ante vibraciones y otros efectos originados por el vehculo y el entorno, su tamao, consumo, seguridad de funcionamiento y desgaste.
Las cmaras de vdeo tienen la ventaja de su amplia difusin y precio, su carcter
pasivo (no se emite energa sobre el entorno) y que no es necesario, en principio, el
empleo de dispositivos mecnicos para la captacin de la imagen. Las desventajas son
los requerimientos computacionales, la sensibilidad a las condiciones de iluminacin,
y los problemas de calibracin y fiabilidad.
La percepcin activa mediante lser es un mtodo alternativo que ha cobrado una
importante significacin en robots mviles (Hebert, 1990). Se utilizan dispositivos
mecnicos y pticos de barrido en el espacio obtenindose imgenes de distancia y reflectancia a las superficies intersectadas por elhaz.
Los sensores de ultrasonido son econmicos y simples para la navegacin (Moravec y Elfes, 1985; Elfes, 1987). Se basan en la determinacin del denominado tiempo
de vuelo de un pulso de sonido (entre 30 kHz y I MHz). Sin embargo, la influencia de
las condiciones ambientales puede ser significativa, debiendo corregirse mediante una
calibracin adecuada. Por otra parte, la relacin seaUruido es normalmente muy inferior a la de los otros sensores, lo que puede hacer necesario el empleo de mltiples frecuencias y tcnicas de filtrado y tratamiento de la incertidumbre de mayor complejidad computacional. Asimismo, la resolucin lateral es mala, existiendo para evitarlo
tcnicas de enfoque mediante lentes acsticas o transmisores curvos.
1.5
ROBOTS AUTNOMOS Y TETERROBTICA
De acuerdo con su grado de autonoma, los robots pueden clasificarse en teleoperados, de funcionamiento repetitivo y autnomos o inteligentes.
En los robots teleoperados las tareas de percepcin del entorno, planificacin y
manipulacin compleja son realizadas por humanos. Es decit el operador acta en
tiempo real cerrando un bucle de control de alto nivel. Los sistemas evolucionados suministran al operador realimentacin sensorial del entorno (imgenes, fuerzas, distancias). En manipulacin se emplean brazos y manos antropomrficos con controladores
NTRODUCCIN
11
Robots autnomos y telerrobtica
automticos que reproducen los movimientos del operador. Alternativamente, el operador mueve una rplica a escala del manipulador, reproducindose los movimientos
en ste (Hirzinger y otros, 1991).
Estos robots son interesantes para trabajos en una localizacinremota (acceso difcil, medios contaminados o peligrosos), en tareas difciles de automatizar y en entornos no estructurados, tales como las que se realizan en la construccin o en el mantenimiento de lneas elctricas (Pen y otros, 1998).
Las mayores dificultades radican en las limitaciones del hombre en la capacidad
de procesamiento numrico y precisin y, sobre todo, en el acoplamiento y coordinacin entre el hombre y robot. En algunas aplicaciones, el retraso de transmisin de informacin juega tambin un papel importante y su consideracin resulta fundamental
en el diseo del sistema de control. El diseo de la interfase persona-mquina suele
ser crtico. La investigacin actual se dirige a hacer recaer en el operador nicamente
las tareas que requieren toma de decisiones en funcin de informacin sensorial,
experiencia, y habilidad (Vertut y Coiffet, 1985; Bejczy, 1991). No obstante, existen
limitaciones por el ancho de banda de la transmisi, y, eventualmente, por la complejidad de la tarea del operador.
Los robots de funconamiento repetitvo son la mayor parte de los que se emplean
en cadenas de produccin industrial. Trabajan normalmente en tareas predecibles e invariantes, con una limitada percepcin del entorno. Son precisos, de alta repetibilidad
y relativamente rpidos; incrementan la productividad ahorrando al hombre trabajos
repetitivos y, eventualmente, muy penosos o incluso peligrosos.
Los robots autnomos o inteligentes son los ms evolucionados desde el punto de vista del procesamiento de informacin. Son mquinas capaces de percibir, modelar el entor-
no, planificar y actuar para alcanzar objetivos sin la intervencin, o con una intervencin
muy pequea, de supervisores humanos. Pueden trabajar en entornos poco estructurados
y dinmicos, realizando acciones en respuesta a contingencias variadas en dicho entorno.
Durante las ltimas dcadas se han realizado importantes esfuerzos en la aplicacin de tcnicas de Inteligencia Artificial. Se han empleado mtodos simblicos de
tratamiento de la informacin basados en modelos geomtricos del entorno. Las dificultades surgen por la elevada capacidad de procesamiento requerida para tratar en
tiempo real problemas suficientemente significativos para muchas aplicaciones y, sobre todo, por la propia incertidumbre de la informacin del entorno. De esta forma, se
resuelven problemas basados en un modelo previo del entorno cuyas soluciones slo
son vlidas si el modelo coresponde exactamente a la realidad. La tcnica obvia de reducir esta incertidumbre consiste en incrementar la informacin que se dispone de dicho entorno mediante realimentacin sensorial. Existen mtodos que permiten intercalar la formulacin y ejecucin de planes con la captacin de la informacin necesaria
para asegurar que el modelo que se util\zapara la planificacin sea lo suficientemente
fiable. Las limitaciones vienen impuestas por el sistema de percepcin y por la propia
arquitectura del sistema de informacin y control del robot.
Desde el punto de vista de la planificacin, existen diferentes arquitecturas diseadas teniendo en cuenta especificaciones sobre el tiempo que tiene el sistema para responder y la disponibilidad de informacin potencialmente interesante.
La solucin se sita normalmente entre dos extremos, en uno de los cuales est la
planificacin puramente estratgica. En este caso, se supone que la situacin en la que
va a ejecutarse el plan puede ser predecida de forma suficientemente precisa durante la
12
INTRMUCiON
Conclusiones
planificacin (Thorpe, 1990). En el otro extremo se sita la planificacin puramente
reactiva en la que se supone que el entorno es incierto, buscndose la mayor flexibilidad posible para reaccionar en cualquier instante lo suficientemente rpido a las discrepancias entre el modelo actual y la realidad observada en el entorno (Fukuda y
otros, 1988; Brooks y Flynn, 1989; Dario y otros, 1991).
El problema puede plantearse tambin en trminos de un compromiso entre eficiencia y flexibilidad. En efecto, las arquitecturas diseadas para conseguir la mayor
flexibilidad ante cualquier eventualidad del entorno son mucho menos eficientes que
las que utilizan criterios de decisin basados en modelos del entorno suficientemente
precisos sin tener demasiado en cuenta la posibilidad de generalizar el comportamiento. En este punto conviene poner de manifiesto el inters de las arquitecturas con capacidad de aprendizaje (Mitchell, 1990) que combinan la planificacin estratgica, basada en tcnicas de bsqueda, con la planificacin puramente reactiva.
1.6 CONCLUSIONES
Este captulo se ha dedicado a introducir nociones bsicas sobre la robtica y los
problemas que se involucran en el desarrollo de robots.
El sistema robot integra componentes mecnicos, elctricos, electrnicos e informticos.
En este captulo se han introducido las tecnologas que se emplean en los actuadores, sensores y sistemas de control de los robots. Se han considerado tanto robots manipuladores como robots mviles.
Finalmente, se ha presentado una clasificacin en robots teleoperados, robots de
funcionamiento repetitivo y robots autnomos o "inteligentes". Estos ltimos son los
ms evolucionados desde el punto de vista del procesamiento de la informacin y objeto de actividades de investigacin y desarrollo, pero todava no se han empleado de
forma masiva en las aplicaciones.
1.7
REFERENCIAS
Akazawa K. y K. Fujii, 1986. "Theory of muscle contraction and motor control". Advanced
Robotics. Vol. 1, pp.379-390.
An C.H., C.G. Atkenson y J.M. Hollerback, 1988. "Model-based control of a robot manipulator". MIT Press, Cambridge, Mass.
Asensio J.R., J.M. Montiel y L. Montano, 1999. "Goal Directed Reactive Robot Navigation
with Relocation Using Laser and Vision". Proc. IEEE International Conference on Robotics
and Automation, ICRA'99. Vol. 4, pp.2905-2910. Detroit, Michigan, USA.
Bares J., M. Hebert, T. Kanade, E. Krotkov, T. Mitchell, R. Simmons y W. Whittaker, 1988.
"Ambler, an autonomous robot for planetary exploration". IEEE Computer.
Bejczy A., 1991. "Recent developments in advanced teleoperation at JPL". Proc. of the fifth International Conference on Advanced Robotics. Pisa (Italia), pp.217-218.
Borenstein J. y Y. Koren, 1989. "Real-time obstacle avoidance for fast mobile robots". IEEE
Transactions on Systems Man and Cybernetics. Vol. 19, pp. ll79-1l87.
Brooks R.A., 1983. "Solving the find-path problem by good representation of free space".
IEEE Transactions on System Man and Cybernetics. Vol 13, pp. 190-197.
*T'JTR$DUCCIN
13
Referencias
Brooks R.A. y M.A. Flynn, 1989. "Robot Beings". Proc. of IEEE Int. Workshop on Intelligent
Robots and Systems, pp. 2-9, Tsukuba (Japn).
Caldwell D.G. y P.M. Taytor, 1988. "Artificial muscles as robotic actuators". Proc. SYROCO'88. Karlsruhe, pp. 40. 1-40.6.
CaoZ.L.,J.J. Roning y E.L. Hall, 1986. "Omnidirectional vision navigation integrating beacon
recognition with positioning". Proc. SPIE Conference on Intelligent Robots and Computer
Vision.
Craig J.J., 1988. "Adaptive control of mechanical manipulators". Addison Wesley.
Dario P., V. Genovese, F. Ribechini y G. Sandini, lggl. "Instinctive cellular robots". Proc. of
the fifth International Conference on Advanced Robotics. Pisa (Italia), pp. 551-555.
Dickman E. y A. Zapp,1987. "Autonomous high-speed road vehicle guidance by computer vision". Proc.of the 10 IFAC World Congress.
Eames, 1973. "A computer perspective". Harvard University Press, Harvard, Mass.
robot that ryEijiri
- M., T. Uno, H. Yoda, T. Goto y K. Thkeyasa,1972. "A prototype intelligent
sembles objects from plane drawings". IEEE Trans. Computers. Vol. C-21, nm. 2,pp.16l-
t70.
Elfes A., 1987. "Sonar based real world mapping and navigation". IEEE Journal of Robotics
and Automation. Vol. RA-3, nm. 3.
Emst H.A., 196l. "A computer operated mechanical hand". Sc.D. Thesis, MIT, Cambridge,
Mass.
Feddema J.T. y O.R. Mitchell, 1989. "Vision-guided servoing with feature-based trajectory generation". IEEE Trans. Robotics and Automation, Vol. 5, nm. 5, pp. 691-700.
Feldman J.,l97l. "The use of vision and manipulation to solve the puzzle". Proc. Second Int.
Joint Conference on Artificial Intelligence. I ondres.pp. 359-364.
Femz J.y A. Ollero, 2000. "Real-time feature matching in image sequences for non-structured
environments. Applications to vehicle guidance". Journal of Intelligent and Robotics Systems, Kluwer Academic Publisher. Vol. 28, Issue ll2, pp.85-123.
Fukuda T., S. Nakagawa, Y. Kawauchi y M. Buss, 1988. "Self organizing robots based on cell
structures-CEBoT". Proc. IEEE INt. Workshop on Intelligent Robots and Systems, pp.
145-150, Tokio (Iapn).
Galhano A.M.S.F., J.A.T. Machado y J.L.M. Carvalho, 1991. "On the analysis of muscle-actuated manipulators". Proc. of the fifth International Conference on Advanced Robotics. Pisa
(Italia), pp.67-71.
GoertzR.C., 1963. "Manipulators used for handling radioactive materials". En "Human Factors
in Technology", E.M. Bennett (ed.), McGraw-Hill, pp. 425-443.
Goldberg K. y B. Pearlmutter, 1988. "Using a neural network to learn the dynamics of the CMU
direct-drive arm II". Technical Report CMU-CS-88-160, Carnegie Mellon University.
Hebert M., 1990. "3-D vision techniques for autonomous vehicles". En "Vision and Navigation: The CMU Navlab". Kluwer Academic Publishers, captulo 8.
Hirzinger G., J. Heindl y K. Landzettel, 1991. "Control Structures in sensor-based teleroboticsystems". Proc. of the fifth International Conference on Advanced Robotics. Pisa (Italia),
pp.267-276.
IEEE Robotics and Automation Magazine,1998. "Special issue on visual servoing". IEEE Robotics and Automation Magazine.
Kambhampati S. y L.S. Davis, 1986. "Multiresolution path planning for mobile robots". IEEE
Journal of Robotic and Automation. Vol. 2, pp. 135-145.
Kanayama I.y B.Hartman, 1989. "smooth local path planning for autonomous vehicles" Proc.
IEEE Conference on Robotics and Automation, PP. 1265-1270.
Kawato, M.y T. Uno, 1988. "Hierarchical neural network model for voluntary movement with
applications to robotics". IEEE Control System Magazine. Vol. 8, pp. 8-15.
14
INTRODTJCCION
Referencias
Khatib O., 1986. "Real time obstacle avoidance for manipulators and mobile robots". IEEE Journal of Robotics and Automation. Vol. 2,pp.90-98.
Lozano-PrezT. y M.A. Wesley, 1979. "An algorithm for planning collision free path among
polyhedral obstacles". Communications of ACM. Yol.22, pp. 560-570.
Lozano-Pre2T.,1983. "Spatial planning: a configuration approach". IEEE Trans. Computers.
Yol.32, pp. 108-120.
Mason M.J. y J.K. Salisbury 1985. "Robots hands & the mechanics of manipulation". MIT
Press.
Miller T., R. Hewes,
F. Glanz y G. Kraft, 1990. "Real-time dynamic control of an industrial manipulator using a neural-network-based learning controller". IEEE Transactions on Robotics and Automation. Vol. 6, nm. 1.
Mitchell, 1990. "Becoming increasingly reactive". Proc. of the 1990 AAAI Conference, Agosto
t990, Boston.
Moravec H., 1981. "Robot rover visual navigation". UMI Reseach Press.
Moravec H. y A. Elfes, 1985. "High resolution maps from a wide-angle sonar". Proc. IEEE
Conference on Robotics and Automation.
Nakano Y., M. Fujie y Y. Hosado, 1984. "Hitachi's robothand". Robotics Age, pp. 18-20.
Nelson W., 1989. "Continuous curvature path for autonomous vehicles". Proc. IEEE Int. Conference on Robotics and Automation, pp. 1260-1264.
Ollero A., 1991. "Evolucin y perspectivas de 1a robtica". Texto de la leccin inaugural del
curso 199l-1992 en la Universidad de Miilaga. Secretariado de Publicaciones de la Universidad de Mlaga.
Ortega R. y M.W. Spong, 1989. "Adaptive motion control of rigid robots: a tutorial". Automatica. Vol. 25, pp. 887-888.
PaulR.P., 1981. "Robot manipulators: mathematics, programming and control". MIT Press.
Pen, L.F., R. Aracil, M. Ferre, E. Pinto, M. Hernando y A. Barrientos, 1998. "Telerobotic system for live power lines maintenance: ROBTET". Proc. IEEE International Conference on
Robotics & Automation, pp. 2IlO-2115. Leuven, Blgica.
Pomerleau D., 1990. "Neural network based autonomous navigation". En "Vision and Navigation: The CMU Navlab". Kluwer Academic Publishers, captulo 5.
Rosheim M.E., 1989. "Robot wrist actuators". Wiley.
Salichs M.A., J.M. Armingol, L.E. Moreno y A. de la Escalera, L999. "Localzation system for
mobile robots in indoor environments". Integrated Computed Aided Engineering. Vol. 6,
nm.4, pp. 303-318.
Silva M., 1984. "Curso de inoduccin y aplicaciones de la robtica". Primer Saln intenacio-
nal de tecnologa y aplicaciones de la robtica". Zaragoza, 1984.
A., 1990. "Multiresolution constraint modelling for mobile robot path-planning". En "Vision and Navigation: The CMU Navlab". Kluwer Academic Publishers, captulo 11.
Sturges R.H., 1990. "A quantification of machine dexterity applied to an assembly task". Int.
Journal of Robotic Research. Vol. 9, nm. 3.
Thorpe C., 1984. "FIDO: Vision and navigation for a robot rover". Ph. D. Thesis, Carnegie MeStenz
llon University.
Thorpe C., 1990. "Vision and Navigation: The CMU Navlab". Kluwer Academic Publishers.
Vertut J. y P. Coiffet, 1985. '"Teleoperations and Robotics". Vol. I y 2. Kogan Page, Prentice
Hall.
y C.P. Neuman, 1987. "Dynamic sensor-based control of robots
with visual feedback". IEEE Journal of Robotics and Automation, RA-3, nm 5, pp. 404-
Weiss L.E., A.C. Sanderson
4t7.
INTRODUCCION
15
You might also like
- Practica 4 Metodos NumericosDocument11 pagesPractica 4 Metodos NumericosMoises Tapia BaezNo ratings yet
- Mat2 T4Document6 pagesMat2 T4Said AlemánNo ratings yet
- Fase. 3 Matriz de Marco LogicoDocument6 pagesFase. 3 Matriz de Marco LogicoANDREANo ratings yet
- Resumen de Procesamiento de CasosDocument7 pagesResumen de Procesamiento de CasoserickaNo ratings yet
- S12.s2 - EjerciciosDocument1 pageS12.s2 - EjerciciosAnahi Ambrosio RiveraNo ratings yet
- Ingeniería de Minas y Metalurgia UNAMDocument401 pagesIngeniería de Minas y Metalurgia UNAMLaísa SalanderNo ratings yet
- Manual MedlabqcDocument16 pagesManual MedlabqcnanaNo ratings yet
- Universidad Nacional Agraria de La SelvaDocument15 pagesUniversidad Nacional Agraria de La SelvaEuler Portilla CarrascoNo ratings yet
- Gases IdealesDocument4 pagesGases IdealesAndrés SarmientoNo ratings yet
- Métodos Estimación de La Población FuturaDocument13 pagesMétodos Estimación de La Población FuturaHollman Yecid Cano SalazarNo ratings yet
- Numeros y PotenciasDocument2 pagesNumeros y PotenciasAlicia B. LópezNo ratings yet
- Proyecto Metodos EstadisticosDocument24 pagesProyecto Metodos EstadisticosDerrick Ferguson100% (1)
- ComunicacionasertivaDocument29 pagesComunicacionasertivaLeri LopezNo ratings yet
- Lo de ComunicaciónDocument12 pagesLo de ComunicaciónDiego A OchoaNo ratings yet
- Proceso de Estrangulación de Un GasDocument3 pagesProceso de Estrangulación de Un GasHéctor de los Ojos Barroso100% (2)
- MEMORIA DE CALCULO Recipiente A Presion.Document61 pagesMEMORIA DE CALCULO Recipiente A Presion.jose patiño100% (3)
- Calculo de EntalpiasDocument2 pagesCalculo de EntalpiasDaiana PierottiNo ratings yet
- Charles Snape, Desafíos MatemáticosDocument48 pagesCharles Snape, Desafíos MatemáticosJuanNo ratings yet
- Estadistica 2Document14 pagesEstadistica 2Javier Acosta100% (1)
- Cuestionario Básico de ExcelDocument3 pagesCuestionario Básico de Excel46682460% (5)
- TALLER 1 - Introduccion A La InformaticaDocument2 pagesTALLER 1 - Introduccion A La InformaticaCristhian Julian Aguazaco100% (2)
- Cap. III Referencias Ypfb TransporteDocument35 pagesCap. III Referencias Ypfb Transportealex gunnarNo ratings yet
- Reporte Practica 3 (Poleas)Document12 pagesReporte Practica 3 (Poleas)Javier AndradeNo ratings yet
- Problemas de Esperanza MatematicaDocument6 pagesProblemas de Esperanza MatematicaRodriguez Perez Brendi JacquelineNo ratings yet
- Duveen, G. Las Representaciones SocialesDocument6 pagesDuveen, G. Las Representaciones SocialesAle De la PeñaNo ratings yet
- Proyecto 6 Portafolio MatematicasDocument33 pagesProyecto 6 Portafolio MatematicasCamila100% (2)
- Cuadernillo de Preguntas Saber 11 Ciencias NaturalesDocument20 pagesCuadernillo de Preguntas Saber 11 Ciencias NaturalesNicanor VelasquezNo ratings yet
- Bases TeoricasDocument22 pagesBases TeoricasMariaDanielaRoaNo ratings yet
- El Gato de SchrödingerDocument10 pagesEl Gato de Schrödingerediel sanchezNo ratings yet
- Investigacion Educativa Fase 7Document8 pagesInvestigacion Educativa Fase 7Junior KevinNo ratings yet