You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 1 Power Spectral Density (PSD) of Communication Signals: S (T) S T) S T) V (T) eDocument4 pages1 Power Spectral Density (PSD) of Communication Signals: S (T) S T) S T) V (T) eNaser A SosiyNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- LINEAR SYSTEMS RESPONSE TO RANDOM INPUTSspdfDocument9 pagesLINEAR SYSTEMS RESPONSE TO RANDOM INPUTSspdfRamakrishnaVakulabharanamNo ratings yet
- PTSP Notes Unit 3 PDFDocument11 pagesPTSP Notes Unit 3 PDFG S ArunNo ratings yet
- Random TTDocument12 pagesRandom TTdeary omarNo ratings yet
- Signals and Systems 01Document10 pagesSignals and Systems 01nvbondNo ratings yet
- PTSP Unit-IvDocument14 pagesPTSP Unit-IvNagendra Madhu DaraNo ratings yet
- Chapter 2 - Lecture NotesDocument20 pagesChapter 2 - Lecture NotesJoel Tan Yi JieNo ratings yet
- Lecture 1Document47 pagesLecture 1oswardNo ratings yet
- Basic Components of A DSP System Generic StructureDocument4 pagesBasic Components of A DSP System Generic StructureMd. Asaduzzaman RazNo ratings yet
- Lecture 14: Random Vibrations & Failure Analysis: Stochastic Processes-1Document27 pagesLecture 14: Random Vibrations & Failure Analysis: Stochastic Processes-1DanielaRiañoLópezNo ratings yet
- 01 Basic SignalDocument13 pages01 Basic SignalNk KushalNo ratings yet
- SS PPT-08.07.2020Document32 pagesSS PPT-08.07.2020BENAZIR BEGAM RNo ratings yet
- NPT29 Randomproces1Document11 pagesNPT29 Randomproces1Poornanand NaikNo ratings yet
- Digital Signal ProcessingDocument22 pagesDigital Signal Processingtdhinakaran100% (1)
- FDSP in PDFDocument87 pagesFDSP in PDFArun JoseNo ratings yet
- Lecture Notes On Waves/Spectra Noise, Correlations and .: W. GekelmanDocument14 pagesLecture Notes On Waves/Spectra Noise, Correlations and .: W. GekelmanDevanand T SanthaNo ratings yet
- Slide 23Document16 pagesSlide 23AbdalmoedAlaiashyNo ratings yet
- Review of Signals and SystemsDocument25 pagesReview of Signals and SystemsAdrian TanNo ratings yet
- A Brief Introduction To Some Simple Stochastic Processes: Benjamin LindnerDocument28 pagesA Brief Introduction To Some Simple Stochastic Processes: Benjamin Lindnersahin04No ratings yet
- Signal Processing and DiagnosticsDocument191 pagesSignal Processing and DiagnosticsChu Duc HieuNo ratings yet
- Course 09-2 - Discrete Time Random SignalsDocument40 pagesCourse 09-2 - Discrete Time Random SignalschilledkarthikNo ratings yet
- Periodic Signals: 1. Application GoalDocument10 pagesPeriodic Signals: 1. Application GoalGabi MaziluNo ratings yet
- Wide-Sense Stationary ProcessDocument8 pagesWide-Sense Stationary ProcessAhmed AlzaidiNo ratings yet
- Unit1 1SS1Document20 pagesUnit1 1SS1Ram MurthyNo ratings yet
- Signals and Systems: 2 Mark Questions and Answers 1.define SignalDocument24 pagesSignals and Systems: 2 Mark Questions and Answers 1.define SignalumaatntpcNo ratings yet
- Continuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcDocument17 pagesContinuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcRutu ShuklaNo ratings yet
- Ss Important QuestionsDocument21 pagesSs Important QuestionsVeera ChaitanyaNo ratings yet
- Journal of Sound and Vibration 1997 - v200 31-40Document10 pagesJournal of Sound and Vibration 1997 - v200 31-40Franco VillanuevaNo ratings yet
- Ss Important Questions PDFDocument0 pagesSs Important Questions PDFBinu VelambilNo ratings yet
- 1-Signal Analysis 01 PDFDocument16 pages1-Signal Analysis 01 PDFAmanya Luka OliangNo ratings yet
- Pierson Moskowitz Sea SpectrumDocument45 pagesPierson Moskowitz Sea Spectrumsf232340% (1)
- Note 1470368643Document10 pagesNote 1470368643abhishekNo ratings yet
- Unidad 2Document28 pagesUnidad 2Mario VasquezNo ratings yet
- Unit I Classification of Signals and SystemsDocument13 pagesUnit I Classification of Signals and SystemsPrabhakar DubeyNo ratings yet
- Unit 1Document69 pagesUnit 1SivaKumar AnandanNo ratings yet
- 2-Mark Questions Anna University Signals and SystemsDocument11 pages2-Mark Questions Anna University Signals and SystemsSonu100% (2)
- Chapter 2 - Lecture SlidesDocument74 pagesChapter 2 - Lecture SlidesJoel Tan Yi JieNo ratings yet
- Math 416 Course Outline and Notes1Document46 pagesMath 416 Course Outline and Notes1Kanana kimathiNo ratings yet
- "Operations On Signals": Guided By: Prof. Hardik PatelDocument18 pages"Operations On Signals": Guided By: Prof. Hardik PatelHamid AwanNo ratings yet
- Noise and Interference Modeling 373Document12 pagesNoise and Interference Modeling 373harishkumar.ravichandranNo ratings yet
- Ec1202 Signals & SystemsDocument18 pagesEc1202 Signals & SystemsarivurpNo ratings yet
- Continuous+Time+Signals Unit1Document82 pagesContinuous+Time+Signals Unit1Gaurav Tiwari100% (2)
- Procesos EstacionariosDocument10 pagesProcesos Estacionariosdaniel18acNo ratings yet
- Sec 1208Document92 pagesSec 1208SATYA GOPAL MONDALNo ratings yet
- Signals and Systems Question BankDocument13 pagesSignals and Systems Question BankDineshNo ratings yet
- Review of Random ProcessesDocument34 pagesReview of Random Processesali_rehman87No ratings yet
- PTRV IV Unit - Classification of Random ProcessesDocument9 pagesPTRV IV Unit - Classification of Random ProcessesBhavaniPrasad100% (1)
- 1 Random Processes: " " Is Considered An Important Background To Communication StudyDocument239 pages1 Random Processes: " " Is Considered An Important Background To Communication StudyPretty FibberNo ratings yet
- Signals and SystemsDocument22 pagesSignals and Systemsvnrao61No ratings yet
- L14: Random ProcessesDocument13 pagesL14: Random ProcessesHunter VerneNo ratings yet
- TS PartIIDocument50 pagesTS PartIIأبوسوار هندسةNo ratings yet
- Ec1202 Signals Systems PDFDocument18 pagesEc1202 Signals Systems PDFHassan AliNo ratings yet
- SS-2-Marks Questions With AnswersDocument15 pagesSS-2-Marks Questions With AnswersNaveen KumarNo ratings yet
- SS-2-Marks Questions With AnswersDocument12 pagesSS-2-Marks Questions With AnswersPasupuleti Venkata RamanaNo ratings yet
- Mccormick 1998 Cyclostationarity in Rotating MachiDocument23 pagesMccormick 1998 Cyclostationarity in Rotating MachijudarangocaNo ratings yet
- Chapter 1 Signal and SystemsDocument30 pagesChapter 1 Signal and SystemsJex DeyNo ratings yet
- S & S 2 MarksDocument30 pagesS & S 2 MarkspriyajegaNo ratings yet
- Chapter 5Document33 pagesChapter 5Seham RaheelNo ratings yet
- Matlab PDFDocument126 pagesMatlab PDFmahe32mahe100% (1)
- List of Selected CandidatesDocument10 pagesList of Selected Candidatesmahe32maheNo ratings yet
- Final List of Degree Recipients 2015 (11092015)Document76 pagesFinal List of Degree Recipients 2015 (11092015)mahe32mahe100% (1)
- Exercise 01 Lin Vs Nonlin Cant BeamDocument16 pagesExercise 01 Lin Vs Nonlin Cant Beammahe32maheNo ratings yet
- NTU Supervisors CEEDocument5 pagesNTU Supervisors CEEmahe32maheNo ratings yet
- Fourier SeriesDocument17 pagesFourier SerieskrishnendumitraNo ratings yet
- MaterialsDocument145 pagesMaterialsNuresa Riana NugrahaNo ratings yet
- Magoosh Vocab Flashcard EbookDocument214 pagesMagoosh Vocab Flashcard EbookMohit G GuptaNo ratings yet
- CFD Lecture (Introduction To CFD) - 2012Document53 pagesCFD Lecture (Introduction To CFD) - 2012mahe32maheNo ratings yet
- Seismic Response Spectra by Mario PazDocument4 pagesSeismic Response Spectra by Mario Pazmahe32maheNo ratings yet
- ALE Formulation For Fluid-Structure Interaction ProblemsDocument17 pagesALE Formulation For Fluid-Structure Interaction Problemsmahe32maheNo ratings yet
- BookDocument176 pagesBookkamal hameed tayyNo ratings yet
- Deflection of A Ss Beam With PT LoadDocument1 pageDeflection of A Ss Beam With PT Loadmahe32maheNo ratings yet
- WindEngineering LongSpanBridgeAerodynamicsDocument18 pagesWindEngineering LongSpanBridgeAerodynamicsmahe32maheNo ratings yet
- Cmpa601J025D: 25 W, 6.0 - 18.0 GHZ, Gan Mmic, Power AmplifierDocument9 pagesCmpa601J025D: 25 W, 6.0 - 18.0 GHZ, Gan Mmic, Power AmplifierDevaraj VasudevanNo ratings yet
- RADAR BRIDGE MASTER ''E'' Series Radar Ship's ManualDocument161 pagesRADAR BRIDGE MASTER ''E'' Series Radar Ship's Manualtoumassis_p100% (11)
- CMOS Means Complementary MOS: NMOS and PMOS Working Together in A CircuitDocument8 pagesCMOS Means Complementary MOS: NMOS and PMOS Working Together in A Circuitsuresht196No ratings yet
- Aoc 2217vDocument51 pagesAoc 2217vGilberto MachadoNo ratings yet
- Topic 3 Oscilloscope and Signal GeneratorDocument24 pagesTopic 3 Oscilloscope and Signal GeneratorChinNo ratings yet
- Principles of Semiconductor DevicesDocument515 pagesPrinciples of Semiconductor Devicestrungkiendt9100% (1)
- HCC4007UB HCF4007UB: Dual Complementary Pair Plus InverterDocument14 pagesHCC4007UB HCF4007UB: Dual Complementary Pair Plus InverterRendy WandarosanzaNo ratings yet
- ActuatorsDocument3 pagesActuatorselavarasanNo ratings yet
- CJ1M (Brochure) PDFDocument2 pagesCJ1M (Brochure) PDFDio Ilham Tirta AdiNo ratings yet
- DV 06 ActuationDocument6 pagesDV 06 ActuationAbhishek SaraswatNo ratings yet
- World's Smallest: Up To 48 ZonesDocument16 pagesWorld's Smallest: Up To 48 ZonesPedroGomes2No ratings yet
- Access Control TestingDocument9 pagesAccess Control Testingiwan100% (2)
- Sae J1211-2012Document126 pagesSae J1211-2012seenudesignNo ratings yet
- DCS A-10c Flight ManualDocument672 pagesDCS A-10c Flight ManualLetícia IsomuraNo ratings yet
- SY1 s17 s18 v12.01 DFDocument50 pagesSY1 s17 s18 v12.01 DFKhalid Khalifa AtyaNo ratings yet
- Precommissioning Check LED Signal DocumentDocument10 pagesPrecommissioning Check LED Signal DocumentVikas SrivastavNo ratings yet
- How To Identify Power ICDocument9 pagesHow To Identify Power ICRajesh100% (2)
- Assignment For EconomicsDocument5 pagesAssignment For EconomicstarekNo ratings yet
- Solid WeldingDocument10 pagesSolid Weldingromanosky11No ratings yet
- Tutorial 4Document2 pagesTutorial 4Sri HarshaNo ratings yet
- AMF Panel Control WiringDocument43 pagesAMF Panel Control WiringAnthony Robert XNo ratings yet
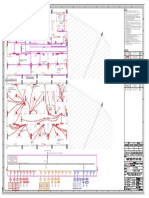
- Electrical Conduit and Fitting Layout:-Notes:-: STP17/OTH/333 STP17/OTH/230Document1 pageElectrical Conduit and Fitting Layout:-Notes:-: STP17/OTH/333 STP17/OTH/230Satya Vamsi DorapalliNo ratings yet
- Must UpsDocument3 pagesMust UpsM Sulaiman NUNo ratings yet
- 7sr23 Dad FlyerDocument2 pages7sr23 Dad Flyerali didebanNo ratings yet
- UHD UF680T 43.49.55.65 Spec 150907 PDFDocument2 pagesUHD UF680T 43.49.55.65 Spec 150907 PDFfreemayNo ratings yet
- 1241 WS4 PDFDocument76 pages1241 WS4 PDFmoussa89% (9)
- Manual Sensor A B Sense GuardDocument5 pagesManual Sensor A B Sense GuardMateus Rodolfo DiasNo ratings yet
- Qw-483 Suggested Format For Welding Procedure Qualification Records (PQR)Document4 pagesQw-483 Suggested Format For Welding Procedure Qualification Records (PQR)aliNo ratings yet
- BMP180 (Barometric Pressure Sensor) : SpecificationsDocument34 pagesBMP180 (Barometric Pressure Sensor) : Specificationsabhilash100% (3)
- 354 33 Powerpoint-Slides CH9Document44 pages354 33 Powerpoint-Slides CH9Saravanan JayabalanNo ratings yet
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)From EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)No ratings yet
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Palo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsFrom EverandPalo Alto Networks: The Ultimate Guide To Quickly Pass All The Exams And Getting Certified. Real Practice Test With Detailed Screenshots, Answers And ExplanationsNo ratings yet