You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- AdvantechDocument68 pagesAdvantechVenkanna YapalaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Protocol Description: The RequestDocument15 pagesProtocol Description: The RequestVenkanna YapalaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Aeron Weather StationDocument4 pagesAeron Weather StationVenkanna Yapala100% (1)
- Evaluation Worksheet in Line With Donald Kirkpatrick 4 LevelsDocument2 pagesEvaluation Worksheet in Line With Donald Kirkpatrick 4 LevelsVenkanna YapalaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Spansion FlashDocument34 pagesSpansion FlashVenkanna YapalaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- G. Snehalatha: Career ObjectiveDocument2 pagesG. Snehalatha: Career ObjectiveVenkanna YapalaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ecm Deck v21Document40 pagesEcm Deck v21rranchesNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- FibreCAT S80 ConfigDocument2 pagesFibreCAT S80 ConfigFlorinNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Kona MacroDocument2 pagesKona MacroLandmine MapperNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Debug 1214Document3 pagesDebug 1214Omar McleanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Catalog Altivar Machine ATV340 Variable Speed DrivesDocument64 pagesCatalog Altivar Machine ATV340 Variable Speed DrivesHendra YusandraNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- CCNA1 v6 2Document47 pagesCCNA1 v6 2Georges karamNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- ProCurve VoIP LLDP QosDocument5 pagesProCurve VoIP LLDP QosfocconNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Gateway Zx4800-02 OobeDocument11 pagesGateway Zx4800-02 OobeJohnNO69No ratings yet
- SC1000Document4 pagesSC1000prannoyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Dell EMC Validates Your Virtualized Genetec Video Management System Before It Reaches Your Hands - InfographicDocument1 pageDell EMC Validates Your Virtualized Genetec Video Management System Before It Reaches Your Hands - InfographicPrincipled TechnologiesNo ratings yet
- The Better Ettercap BettercapDocument8 pagesThe Better Ettercap BettercapJonathan JaegerNo ratings yet
- Denis CVDocument4 pagesDenis CVapi-320527039No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Basics - of WEBDocument108 pagesBasics - of WEBmounikajana2005No ratings yet
- Filter CommandDocument13 pagesFilter CommandAmit PatelNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- New Employee IT OrientationDocument45 pagesNew Employee IT OrientationHarshaNo ratings yet
- SunGard Cloud Solutions IaaS BrochureDocument2 pagesSunGard Cloud Solutions IaaS BrochureSunGard Availability ServicesNo ratings yet
- Packet Tracer - Access Control List Demonstration: ObjectivesDocument3 pagesPacket Tracer - Access Control List Demonstration: ObjectivesMaría ArmijosNo ratings yet
- Git Hub PDF Cheat SheetDocument2 pagesGit Hub PDF Cheat SheetasdkuvheriugbzjNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- DCS MCQs Unit 1to4 SirDocument20 pagesDCS MCQs Unit 1to4 Sirakshata bhuteNo ratings yet
- Dell FTOS 03b Port Channel Interface ConfigurationDocument6 pagesDell FTOS 03b Port Channel Interface ConfigurationBambang AdiNo ratings yet
- MAN ME-C MPC LedDocument7 pagesMAN ME-C MPC LedG_ARVALIS8470No ratings yet
- Laboratory 01Document31 pagesLaboratory 01Raymond Virgil MoralesNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- RTN 905 S Product Description (V100R020C10 - 02) (PDF) - ENDocument90 pagesRTN 905 S Product Description (V100R020C10 - 02) (PDF) - ENJuanNo ratings yet
- Huawei Product and Knowledge Enterprise Customer Training Manual PDFDocument644 pagesHuawei Product and Knowledge Enterprise Customer Training Manual PDFDemarco Dayanghirang FormalejoNo ratings yet
- College ContactsDocument33 pagesCollege ContactsNilesh DigheNo ratings yet
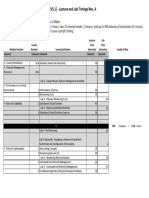
- Vmware Vsphere: Optimize and Scale (V5.1) - Lecture and Lab Timings Rev. ADocument1 pageVmware Vsphere: Optimize and Scale (V5.1) - Lecture and Lab Timings Rev. Au9yNo ratings yet
- IPT T4 Trading Datasheet Linx NetworksDocument4 pagesIPT T4 Trading Datasheet Linx NetworksBanjac BojanNo ratings yet
- Cisco CSS 11000 Series OverviewDocument4 pagesCisco CSS 11000 Series OverviewGerryNo ratings yet
- MapReduce ExampleDocument76 pagesMapReduce ExampleYoonMin NamNo ratings yet
- Getting To Grips With FANS Future Air Navigation SystemDocument262 pagesGetting To Grips With FANS Future Air Navigation SystemPunthep Punnotok100% (3)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)