You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- XC3000 Series Motion Control System of Laser Cutting Commissioning Manual TextDocument138 pagesXC3000 Series Motion Control System of Laser Cutting Commissioning Manual Textgerardo.reynosoNo ratings yet
- Performance Online - Classic Car Parts CatalogDocument168 pagesPerformance Online - Classic Car Parts CatalogPerformance OnlineNo ratings yet
- Az 203 PDFDocument337 pagesAz 203 PDFViktors PetrinaksNo ratings yet
- BS en Iso 11114-4-2005 (2007)Document30 pagesBS en Iso 11114-4-2005 (2007)DanielVegaNeira100% (1)
- Perez V Monetary BoardDocument4 pagesPerez V Monetary BoardlawNo ratings yet
- Vibroscreen BrochureDocument12 pagesVibroscreen BrochureVarun MalhotraNo ratings yet
- 201 bài tập phương trình vi phânDocument47 pages201 bài tập phương trình vi phântranthevut100% (1)
- Research On Restaurant DesignDocument20 pagesResearch On Restaurant DesignCrizalene Caballero100% (1)
- ResumeDocument1 pageResumeHiếu NguyễnNo ratings yet
- Chuong03 RegisterTransferSpecificationAndDesignDocument52 pagesChuong03 RegisterTransferSpecificationAndDesignHiếu NguyễnNo ratings yet
- Assignment 1Document1 pageAssignment 1quocdongsonNo ratings yet
- Custom KeysDocument128 pagesCustom KeysHiếu NguyễnNo ratings yet
- Insular Bank of Asia vs. InciongDocument11 pagesInsular Bank of Asia vs. InciongChristiane Marie BajadaNo ratings yet
- M6 FORMATIVE3 VHDL Behavioral Programming 1Document14 pagesM6 FORMATIVE3 VHDL Behavioral Programming 1Allen Ray LedesmaNo ratings yet
- Primal Grow Pro Supplement Review - Does It Work or Scam?Document3 pagesPrimal Grow Pro Supplement Review - Does It Work or Scam?Rakib0% (1)
- Final - Far Capital - Infopack Diana V3 PDFDocument79 pagesFinal - Far Capital - Infopack Diana V3 PDFjoekaledaNo ratings yet
- XJ600SJ 1997Document65 pagesXJ600SJ 1997astracatNo ratings yet
- Relative Clauses (Who, Which, That) For B LevelDocument16 pagesRelative Clauses (Who, Which, That) For B LevelOğuzhan KarabayNo ratings yet
- Types of IndexDocument4 pagesTypes of IndexKantha EnduriNo ratings yet
- CN842 HBDocument15 pagesCN842 HBElif SarıoğluNo ratings yet
- Cover LetterDocument16 pagesCover LetterAjmal RafiqueNo ratings yet
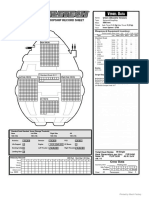
- Union Class Dropship 3025Document1 pageUnion Class Dropship 3025A KNo ratings yet
- Piston EffectDocument11 pagesPiston EffectBK180No ratings yet
- Đo Nhiệt Độ LI-24ALW-SelectDocument4 pagesĐo Nhiệt Độ LI-24ALW-SelectThang NguyenNo ratings yet
- Sikaplan®-1652 Bonded VOC Gas Barrier: Product Data SheetDocument3 pagesSikaplan®-1652 Bonded VOC Gas Barrier: Product Data SheetKhin Sandi KoNo ratings yet
- ESAT FormulaDocument11 pagesESAT FormulaSKYE LightsNo ratings yet
- QuickTransit SSLI Release Notes 1.1Document12 pagesQuickTransit SSLI Release Notes 1.1subhrajitm47No ratings yet
- 7 Hive NotesDocument36 pages7 Hive NotesSandeep BoyinaNo ratings yet
- FM Solved ProblemsDocument28 pagesFM Solved ProblemsElisten DabreoNo ratings yet
- Internship ReportDocument2 pagesInternship ReportFoxyNo ratings yet
- GM1. Intro To FunctionsDocument5 pagesGM1. Intro To FunctionsGabriel Benedict DacanayNo ratings yet
- Pabon v. NLRCDocument4 pagesPabon v. NLRCHaniyyah FtmNo ratings yet
- Shalina Healthcare JD - Business AnalyticsDocument2 pagesShalina Healthcare JD - Business AnalyticsMeow bunNo ratings yet
- Cir vs. de La SalleDocument20 pagesCir vs. de La SalleammeNo ratings yet